TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025041495
公報種別
公開特許公報(A)
公開日
2025-03-26
出願番号
2024000362
出願日
2024-01-04
発明の名称
ロボット及びロボットの制御方法
出願人
現代自動車株式会社
,
HYUNDAI MOTOR COMPANY
,
起亞株式会社
,
KIA CORPORATION
代理人
個人
,
個人
,
個人
主分類
G05D
1/226 20240101AFI20250318BHJP(制御;調整)
要約
【課題】ロボットと管制サーバとの間のネットワークが断絶された状況で、ロボットの安定性を確保してサービス品質を補完し、管制サーバから受信したメカニズムによって定義された回避移動命令を行うための、ロボット及びロボットの制御方法を提供する。
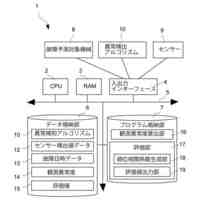
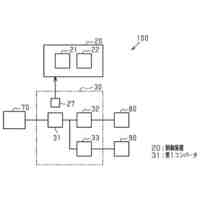
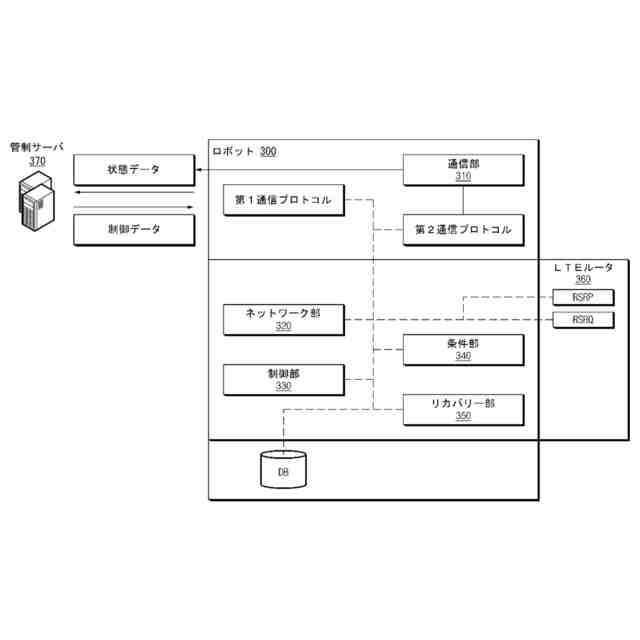
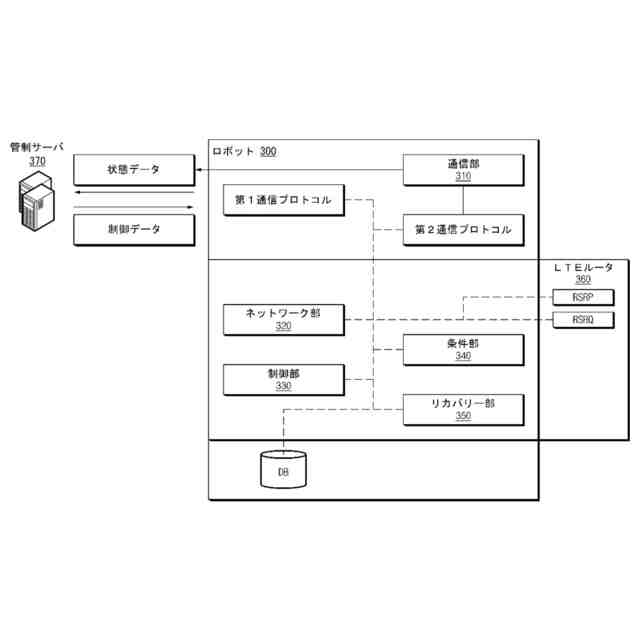
【解決手段】ロボットは、第1通信プロトコル及び第2通信プロトコルに基づいて、管制サーバと通信を行う通信部と、第1通信プロトコルの設定及び第2通信プロトコルの設定に基づいて、通信部及び管制サーバの間のネットワーク連結状態を決定するネットワーク部と、ネットワーク部により決定されたネットワーク連結状態に基づいて、ロボットの動作を制御する制御部と、を含む。
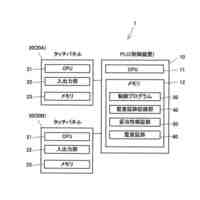
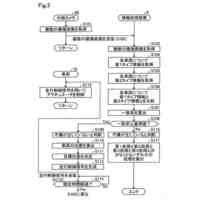
【選択図】図3
特許請求の範囲
【請求項1】
ロボットであって、
第1通信プロトコル及び第2通信プロトコルに基づいて、管制サーバと通信を行う通信部と、
前記第1通信プロトコルの設定及び前記第2通信プロトコルの設定に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態を決定するネットワーク部と、
前記ネットワーク部により決定された前記ネットワーク連結状態に基づいて、前記ロボットの動作を制御する制御部と、を含む、
ロボット。
続きを表示(約 2,200 文字)
【請求項2】
前記通信部は、
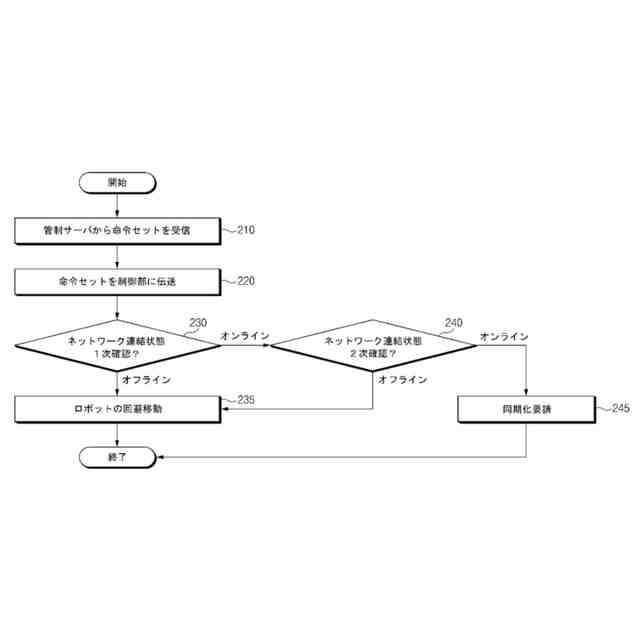
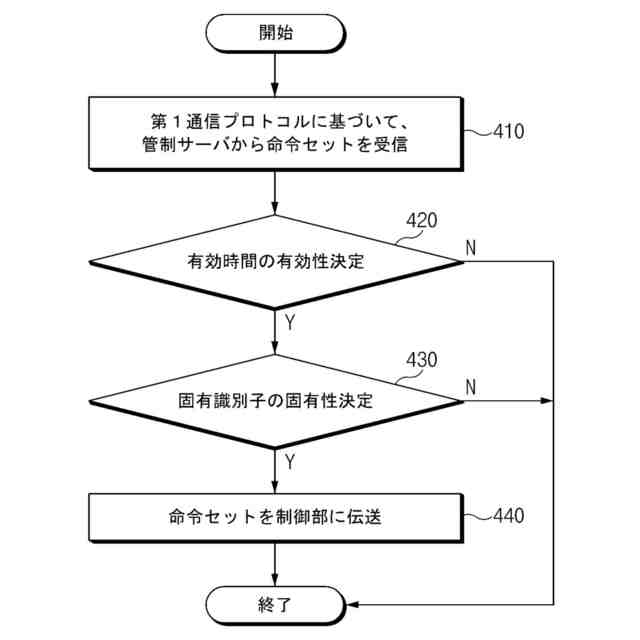
前記通信部及び前記管制サーバの間のネットワーク連結状態がオンライン状態の場合に基づいて、前記管制サーバから移動命令、前記移動命令の有効時間、前記移動命令の固有識別子、及びオフライン移動可否を含む命令セットを受信し、
前記移動命令を受信した第1時点及び前記第1時点に後続する第2時点の差と、前記移動命令の有効時間を比べて、前記移動命令の有効時間が有効であるか否かを決定し、
前記移動命令の固有識別子と、前記ロボットの保存部に含まれて前記移動命令と異なる命令に対応する識別子を比べて、前記移動命令の固有識別子が固有であるか否かを決定する、
請求項1に記載のロボット。
【請求項3】
前記通信部は、
前記第1通信プロトコルに基づいて、前記管制サーバから前記命令セットを受信し、
前記移動命令の有効時間が有効で、前記移動命令の固有識別子が固有な場合に基づいて、前記命令セットを前記制御部に伝送し、
前記制御部は、
前記通信部から前記命令セットを受信した場合、前記命令セットに含まれた前記移動命令に基づいて、前記ロボットの動作を制御する、
請求項2に記載のロボット。
【請求項4】
前記ロボットは、
前記ネットワーク部と通信を行うLTE(Long-Term Evolution)ルータをさらに含み、
前記ネットワーク部は、
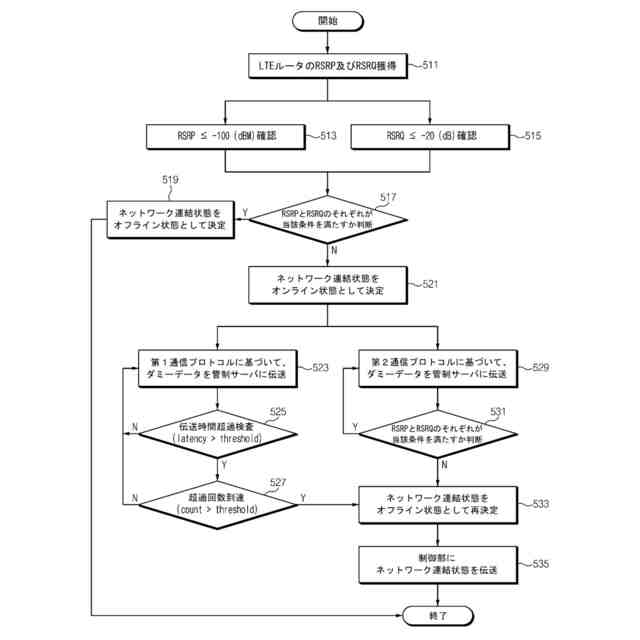
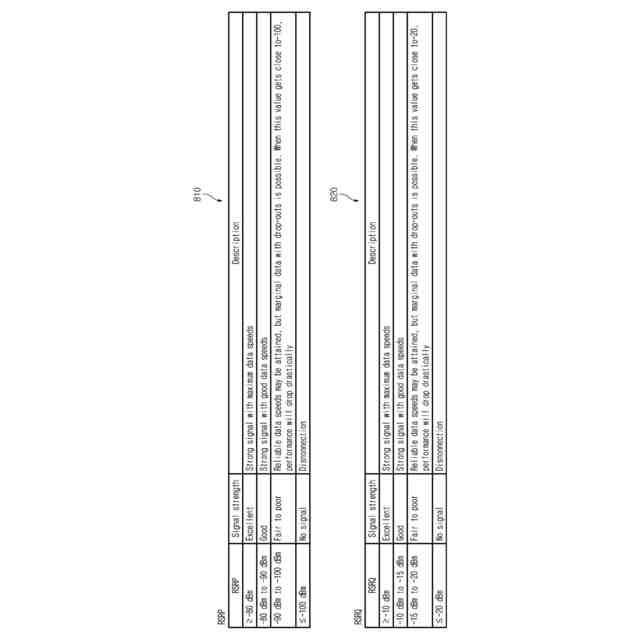
前記通信部が前記管制サーバから命令セットを受信し、前記命令セットが前記制御部に伝送された場合に基づいて、前記LTEルータのRSRP(Reference Signal Received Power)及びRSRQ(Reference Signal Received Quality)を獲得し、
前記RSRPが第1閾値以下で、前記RSRQが前記第1閾値と異なる第2閾値以下の場合に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態をオフライン状態として決定する、
請求項1に記載のロボット。
【請求項5】
前記ネットワーク部は、
前記RSRPが前記第1閾値を超過するか、又は前記RSRQが前記第2閾値を超過した場合に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態をオンライン状態として決定し、
前記通信部及び前記管制サーバの間のネットワーク連結状態がオンライン状態として決定された場合、前記第1通信プロトコルの設定及び前記第2通信プロトコルの設定に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態を再決定する、
請求項4に記載のロボット。
【請求項6】
前記ネットワーク部は、
前記第1通信プロトコルに基づいて、予め決定された時間間隔ごとに任意のダミー(dummy)データを前記管制サーバに伝送し、
前記ダミーデータの伝送時間が第1対象閾値を超過する場合に基づいて、カウントデータを予め決定された単位間隔で増加させ、
前記カウントデータが第2対象閾値を超過する場合に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態をオフライン状態として再決定する、
請求項5に記載のロボット。
【請求項7】
前記ネットワーク部は、
前記第2通信プロトコルに基づいて、予め決定された時間間隔ごとに任意のダミーデータを前記管制サーバに伝送し、
前記ダミーデータが前記管制サーバに伝送できなかった場合に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態をオフライン状態として再決定する、
請求項5に記載のロボット。
【請求項8】
前記制御部は、
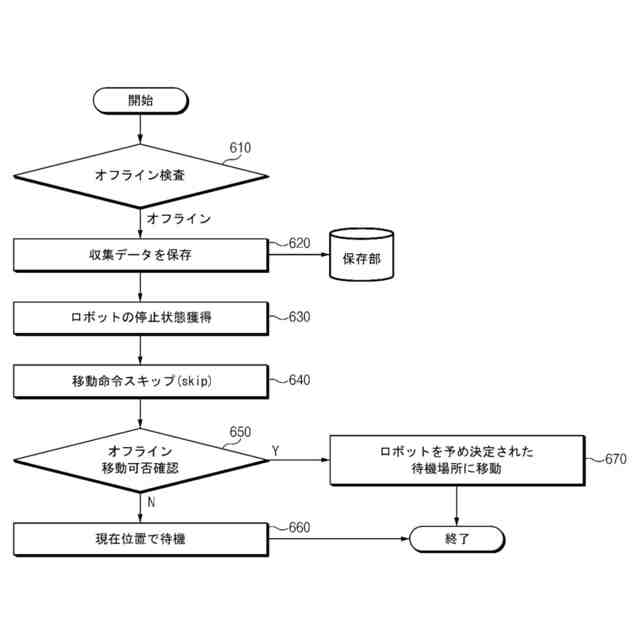
前記通信部及び前記管制サーバの間のネットワーク連結状態がオフライン状態として決定された対象時点から、前記ロボットにより獲得された収集データを保存し、
前記対象時点から前記ロボットが停止状態の場合、前記移動命令をスキップ(skip)し、
前記移動命令がスキップされた場合に基づいて、前記オフライン移動可否に応じて前記ロボットの動作を制御する、
請求項2に記載のロボット。
【請求項9】
前記制御部は、
前記オフライン移動可否の値が前記ロボットの移動可能を示す場合、前記ロボットが予め決定された待機場所に移動できるように前記ロボットの動作を制御し、
前記オフライン移動可否の値が前記ロボットの移動不可能を示す場合、前記ロボットの位置で前記ロボットの動作を制御する、
請求項8に記載のロボット。
【請求項10】
前記制御部は、
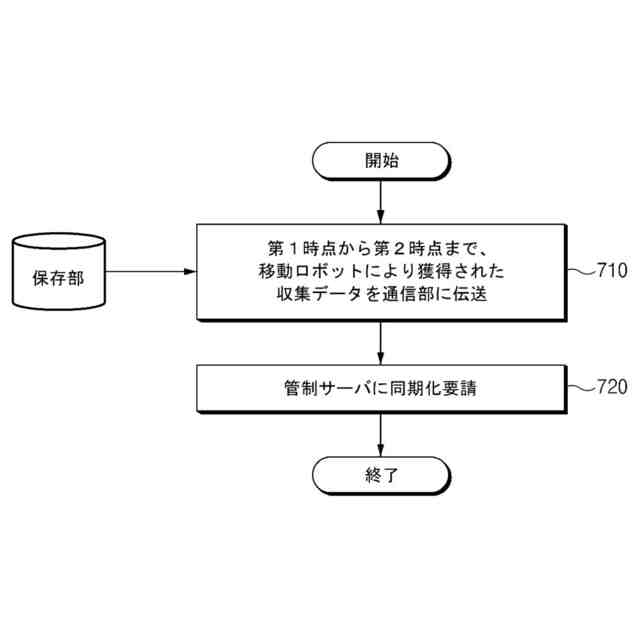
前記通信部及び前記管制サーバの間のネットワーク連結状態がオフライン状態として決定された第1時点から、前記通信部及び前記管制サーバの間のネットワーク連結状態がオフライン状態からオンライン状態に変更された第2時点まで、前記ロボットにより獲得して保存された収集データを前記通信部に伝送し、
前記通信部は、
前記保存された収集データを前記管制サーバに伝送することで、前記管制サーバと前記ロボットの同期化を要請する、
請求項1に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット及びロボットの制御方法に関し、より詳細には、ロボットのネットワーク連結状態に基づいてロボットを制御するための技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
管制サーバは、ロボットの管制において、ロボットのオン/オフライン状態をモニタリングし、ロボットの多様なセンサー値を介してリアルタイム位置を把握することができる。管制サーバは、ロボットがオンライン状態の場合、ロボットを管制ないし制御することができ、地図を確認してロボットの位置を手動で移動させることができる。
【0003】
ただし、ロボットと管制サーバとの間のネットワーク断絶は、ロボットの現在位置又はロボットの現在状態を把握することが不可能で、管制サーバからロボットを制御するかモニタリングできない、安全性低下の問題を有することがある。
【0004】
また、ロボットと管制サーバとの間のネットワーク断絶は、多重ロボットを制御するシステムにおいて、命令を受けなかったロボットが無限待機状態となり得る、生産性及び効率性低下の問題を有することがある。例えば、限定された空間で一台のロボットがオフライン状態となって停止されていると、他のロボットの移動が不可能になるか、人の歩行に非常に不便さをもたらす可能性がある。
【0005】
このような問題を解決するために、ロボットと管制サーバとの間のネットワークが断絶された状況で、ロボットの安定性を確保してサービス品質を補完するために、管制サーバから受信したメカニズムによって定義された回避移動命令を行うことができる技術の開発が必要である。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の実施形態は、第1通信プロトコルと第2通信プロトコルに基づいて、管制サーバと通信を行うことで、大規模通信処理に適合し、高い処理量とリアルタイムデータ処理に最適化し、非同期的に作動して両方向ストリームを支援することができ、一般的なMQTTプロトコルの欠点を補完し、データ損失を最小化してロボットが誤った命令を受信することを防止できるロボット及びロボットの制御方法の提供を目的とする。
【0007】
また、本発明の実施形態は、第1通信プロトコルの設定及び第2通信プロトコルの設定に基づいて、ネットワーク連結状態を少なくとも2回以上決定することで、遂行中の命令に対する例外シナリオを行い、ロボットの安全性とサービス品質を確保できるロボット及びロボットの制御方法の提供を目的とする。
【0008】
また、本発明の実施形態は、ネットワーク部により決定されたネットワーク連結状態に基づいてロボットの動作を制御し、ネットワーク連結状態がオフライン状態からオンライン状態に復元される場合、管制サーバと同期化を行い、最後に遂行中の命令及び/又は作業を再び自動で再開できるロボット及びロボットの制御方法の提供を目的とする。
【0009】
本発明の技術的課題は、以上で言及した技術的課題に制限されず、言及されていないさらに他の技術的課題は、以下の記載から当業者に明確に理解され得る。
【課題を解決するための手段】
【0010】
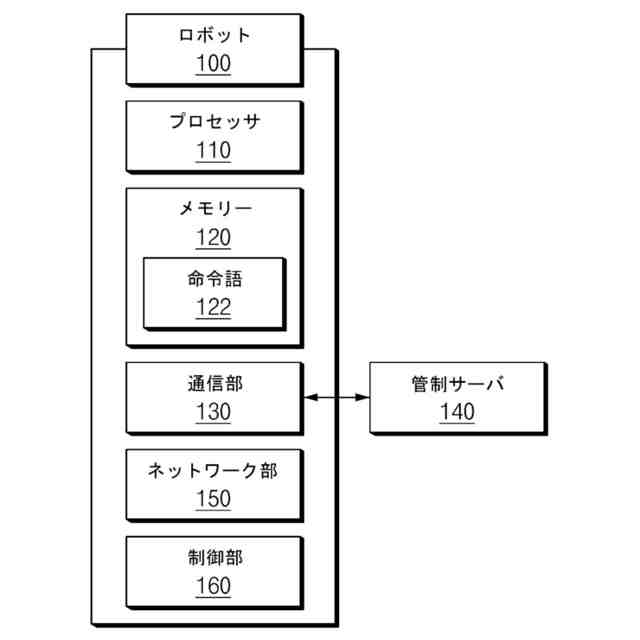
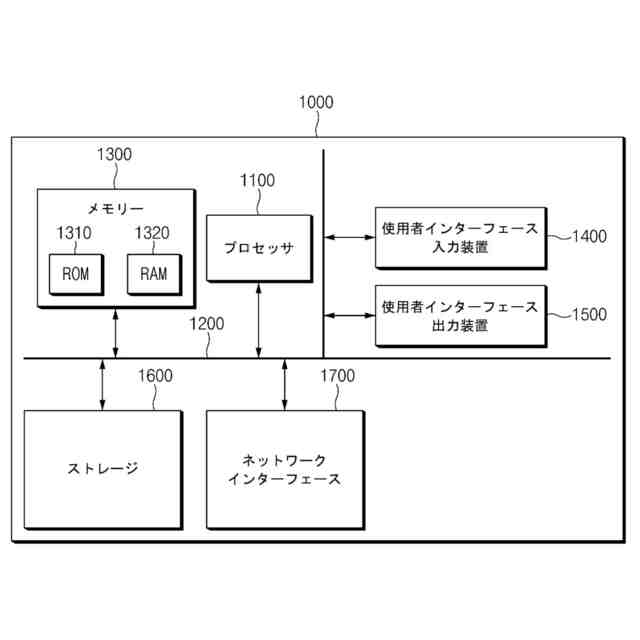
本発明の実施形態によるロボットは、ロボットにおいて、第1通信プロトコル及び第2通信プロトコルに基づいて、管制サーバと通信を行う通信部;前記第1通信プロトコルの設定及び前記第2通信プロトコルの設定に基づいて、前記通信部及び前記管制サーバの間のネットワーク連結状態を決定するネットワーク部;及び前記ネットワーク部により決定された前記ネットワーク連結状態に基づいて、前記ロボットの動作を制御する制御部を含んでよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
和研工業株式会社
多連レバー機構
10日前
スター精密株式会社
工作機械
26日前
ローム株式会社
半導体集積回路
5日前
国立大学法人広島大学
モデル誤差抑制補償器
1か月前
愛知機械テクノシステム株式会社
無人搬送車
19日前
アズビル株式会社
制御システムおよび制御方法
20日前
アズビル株式会社
制御システムおよび制御方法
11日前
アズビル株式会社
制御システムおよび制御方法
11日前
トヨタ自動車株式会社
自律走行装置
1か月前
日本精工株式会社
制御装置および制御方法
17日前
チームラボ株式会社
走行システム及び走行路
24日前
村田機械株式会社
稼働監視システム及び稼働監視方法
20日前
トヨタ自動車株式会社
群制御システム及び群制御方法
19日前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
半導体装置
1か月前
ミツミ電機株式会社
電源回路及びその起動方法
1か月前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
17日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
ミツミ電機株式会社
多方向入力装置
3日前
HEROZ株式会社
異常検知アルゴリズムの評価システム
19日前
株式会社マキタ
作業ロボット
25日前
株式会社TMEIC
リモートI/Oステーション
11日前
岩井ファルマテック株式会社
監査証跡の管理システム
6日前
株式会社エイトノット
情報処理システム
1か月前
ローム株式会社
レギュレータ回路
4日前
トヨタ自動車株式会社
ソーラー発電システムの制御装置
25日前
大阪瓦斯株式会社
二次圧制御機構、及び制御方法
1か月前
株式会社牧野フライス製作所
生産システム
12日前
トヨタ自動車株式会社
情報処理装置
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ