TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025035889
公報種別
公開特許公報(A)
公開日
2025-03-14
出願番号
2023143213
出願日
2023-09-04
発明の名称
電動車両の制御方法及び電動車両の制御装置
出願人
日産自動車株式会社
代理人
弁理士法人後藤特許事務所
主分類
B60L
15/20 20060101AFI20250307BHJP(車両一般)
要約
【課題】全ての車輪を駆動している状態においてもスリップを抑制するスリップ制御を適切に実行する。
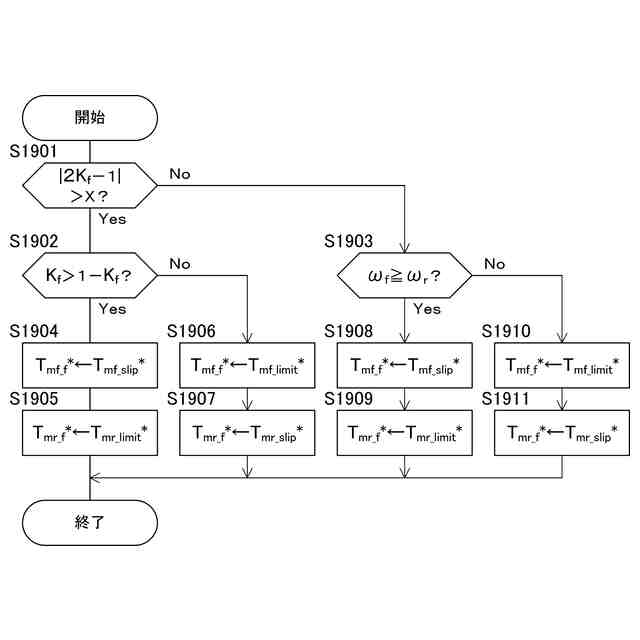
【解決手段】フロントモータ21と、リアモータ31と、モータコントローラ14とを備える電動車両の制御方法である。ステップS203において、最終トルク指令値演算部604は、前輪22及び後輪32のうちの一方の駆動輪速を用いて他方の駆動輪を駆動する他方のモータのスリップ回転数制御を実行する。ステップS203において、トルク制限部803、1403は、制限トルクT
lim
に基づいて、一方の駆動輪の目標トルク指令値を補正してトルク制限値を算出する。ステップS1901、S1902において、最終トルク指令値演算部604は、フロントモータ21及びリアモータ31のトルク配分比に基づいて、スリップ回転数制御を実行する他方のモータを決定する。
【選択図】図19
特許請求の範囲
【請求項1】
第1輪を駆動する第1駆動モータと、第2輪を駆動する第2駆動モータと、前記第1駆動モータ及び前記第2駆動モータの動作を制御する制御装置と、を備える電動車両の制御方法であって、
前記制御装置は、
前記第1輪及び前記第2輪のうちの一方の駆動輪速を用いて他方の駆動輪を駆動する他方のモータのスリップ回転数制御を実行し、
前記他方のモータのトルク指令値である第1トルク指令値と、前記一方の駆動輪を駆動する一方のモータのトルク指令値である第2トルク指令値と、前記一方のモータの回転状態とに基づいて、前記電動車両に作用する外乱に係るトルクを示す外乱トルク値を推定し、
前記外乱トルク値と、前記第1トルク指令値とに基づいてトルク制限値を算出し、
前記トルク制限値に基づいて前記一方のモータの目標トルク指令値を補正して前記第2トルク指令値を設定し、
前記電動車両が必要とする駆動力に基づいて設定される前記第1駆動モータ及び前記第2駆動モータのトルク配分比に基づいて、前記スリップ回転数制御を実行する前記他方のモータを決定する、
電動車両の制御方法。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の電動車両の制御方法であって、
前記制御装置は、前記トルク配分比の差の絶対値が所定値よりも大きい場合には、前記トルク配分比が相対的に大きいモータを前記他方のモータとして決定する、
電動車両の制御方法。
【請求項3】
請求項1又は2に記載の電動車両の制御方法であって、
前記制御装置は、前記トルク配分比の差の絶対値が所定値以下の場合には、前記電動車両の走行シーンに応じて変化する、前記第1輪及び前記第2輪のそれぞれの路面への伝達駆動力に基づいて、前記他方のモータを決定する、
電動車両の制御方法。
【請求項4】
請求項3に記載の電動車両の制御方法であって、
前記伝達駆動力は、前記第1輪及び前記第2輪のそれぞれの接地荷重に対応する、
電動車両の制御方法。
【請求項5】
請求項4に記載の電動車両の制御方法であって、
前記第1輪は、前記電動車両の前輪であり、前記第2輪は、前記電動車両の後輪であり、
前記制御装置は、前記前輪の接地荷重が前記後輪の接地荷重以上である場合には、前記第1駆動モータを前記他方のモータとして決定し、前記前輪の接地荷重が前記後輪の接地荷重よりも小さい場合には、前記第2駆動モータを前記他方のモータとして決定する、
電動車両の制御方法。
【請求項6】
第1輪を駆動する第1駆動モータと、第2輪を駆動する第2駆動モータとの動作を制御する電動車両の制御装置であって、
前記第1輪及び前記第2輪のうちの一方の駆動輪速を用いて他方の駆動輪を駆動する他方のモータのスリップ回転数制御を実行するスリップ回転数制御部と、
前記他方のモータのトルク指令値である第1トルク指令値と、前記一方の駆動輪を駆動する一方のモータのトルク指令値である第2トルク指令値と、前記一方のモータの回転状態とに基づいて、前記電動車両に作用する外乱に係るトルクを示す外乱トルク値を推定する外乱トルク値推定部と、
前記外乱トルク値と、前記第1トルク指令値とに基づいてトルク制限値を算出するトルク制限値算出部と、
前記トルク制限値に基づいて前記一方のモータの目標トルク指令値を補正して前記第2トルク指令値を設定する第2トルク指令値設定部と、
前記電動車両が必要とする駆動力に基づいて設定される前記第1駆動モータ及び前記第2駆動モータのトルク配分比に基づいて、前記スリップ回転数制御を実行する前記他方のモータを決定するモータ決定部と、を備える、
電動車両の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動車両の制御方法及び電動車両の制御装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、電動車両のスリップ状態を抑制するスリップ制御に関する技術が存在する。例えば、車輪を駆動する電動モータのモータ回転速度と、従動輪速度とを用いて駆動輪のスリップ状態を検出し、駆動輪のスリップが検出されたときにスリップ制御用指令トルクを算出して電動モータの出力を制限し、スリップを抑制するスリップ制御技術が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2017-158337号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した従来技術では、スリップしていない従動輪(即ち、電動モータによる駆動を行っていない車輪)の回転数を用いて駆動輪のスリップ状態を検出してスリップ制御を行う。しかし、全ての車輪を駆動する電動車両の場合には、全ての車輪がスリップしている状態になる可能性がある。このように、全ての車輪がスリップしている状態では、スリップ状態を適切に検出することが困難となり、スリップを抑制するスリップ制御を適切に実行することが困難となるおそれがある。
【0005】
本発明は、全ての車輪を駆動している状態においてもスリップを抑制するスリップ制御を適切に実行することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、第1輪を駆動する第1駆動モータと、第2輪を駆動する第2駆動モータと、第1駆動モータ及び第2駆動モータの動作を制御する制御装置と、を備える電動車両の制御方法である。制御装置は、第1輪及び第2輪のうちの一方の駆動輪速を用いて他方の駆動輪を駆動する他方のモータのスリップ回転数制御を実行し、他方のモータのトルク指令値(第1トルク指令値)と、一方の駆動輪を駆動する一方のモータのトルク指令値(第2トルク指令値)と、一方のモータの回転状態とに基づいて、電動車両に作用する外乱に係るトルクを示す外乱トルク値を推定し、外乱トルク値と、第1トルク指令値とに基づいてトルク制限値を算出し、トルク制限値に基づいて一方のモータの目標トルク指令値を補正して第2トルク指令値を設定し、電動車両が必要とする駆動力に基づいて設定される第1駆動モータ及び第2駆動モータのトルク配分比に基づいて、スリップ回転数制御を実行する他方のモータを決定する。
【発明の効果】
【0007】
本発明によれば、全ての車輪を駆動している状態においてもスリップを抑制するスリップ制御を適切に実行することができる。
【図面の簡単な説明】
【0008】
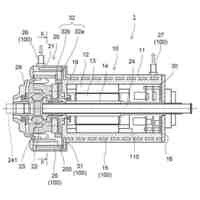
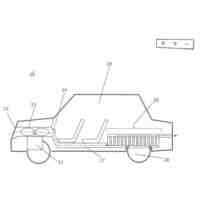
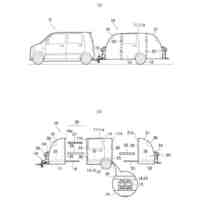
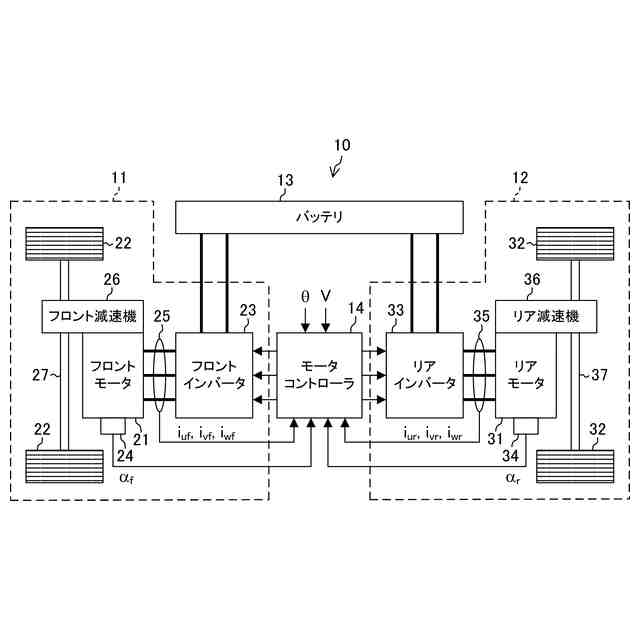
図1は、電動車両のシステム構成の一例を示す概略構成図である。
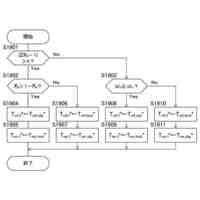
図2は、モータコントローラによる制御処理例を示すフローチャートである。
図3は、アクセル開度-トルクテーブルの一例を示す図である。
図4は、トルク配分演算部の機能構成の一例を示すブロック図である。
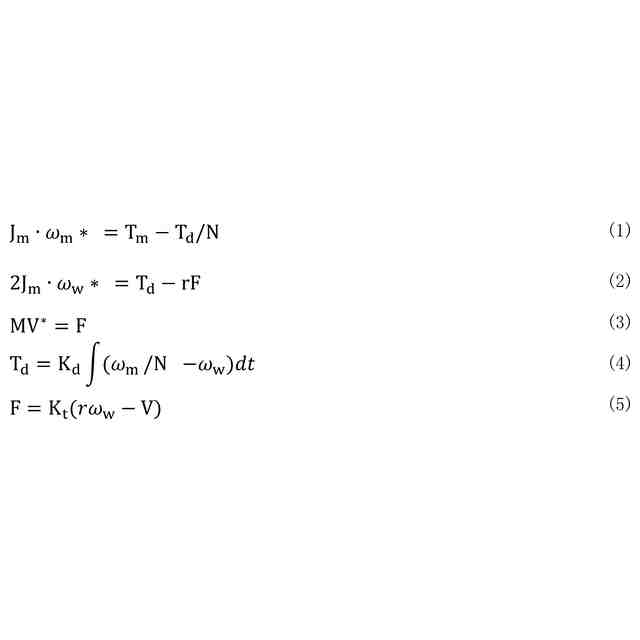
図5は、電動車両の運動方程式で用いるパラメータを示す説明図である。
図6は、スリップ抑制演算処理のシステム構成例を示すブロック図である。
図7は、フロントスリップ抑制演算処理のシステム構成例を示すブロック図である。
図8は、フロントトルク制限演算部の機能構成例を示すブロック図である。
図9は、外乱推定演算部の機能構成例を示すブロック図である。
図10は、制限トルク算出部の機能構成例を示すブロック図である。
図11は、フロントトルク制限値の算出処理例を示すフローチャートである。
図12は、車速推定値の算出処理例を示すフローチャートである。
図13は、リアスリップ抑制演算処理のシステム構成例を示すブロック図である。
図14は、リアトルク制限演算部の機能構成例を示すブロック図である。
図15は、外乱推定演算部の機能構成例を示すブロック図である。
図16は、制限トルク算出部の機能構成例を示すブロック図である。
図17は、リアトルク制限値の算出処理例を示すフローチャートである。
図18は、車速推定値の算出処理例を示すフローチャートである。
図19は、最終トルク指令値の算出処理例を示すフローチャートである。
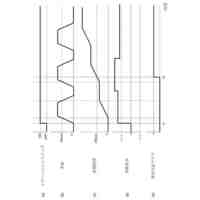
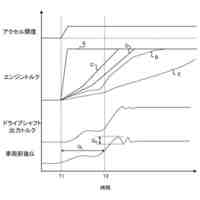
図20は、電動車両の加速時におけるタイムチャートである。
図21は、電動車両の減速時におけるタイムチャートである。
図22は、電動車両の加速時におけるタイムチャートである。
図23は、電動車両の減速時におけるタイムチャートである。
【発明を実施するための形態】
【0009】
以下、添付図面を参照しながら本発明の実施形態について説明する。
【0010】
図1は、電動車両10のシステム構成の一例を示す概略構成図である。本実施形態では、モータ(電動機)を前後に独立して搭載した電動車両10を例にして説明する。すなわち、電動車両10は、前輪22と後輪32を各々異なるモータによって駆動する四輪駆動車両である。電動車両10は、フロント駆動システム11、リア駆動システム12、バッテリ13、及び、モータコントローラ14を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日産自動車株式会社
駆動装置
4日前
日産自動車株式会社
回転電機
4日前
日産自動車株式会社
インバータ
4日前
日産自動車株式会社
配車管理装置及び配車管理方法
4日前
日産自動車株式会社
台車の誤払出防止装置および方法
18日前
日産自動車株式会社
車両用フロアカーペットの敷設構造
今日
日産自動車株式会社
トルク制御方法及びトルク制御装置
4日前
日産自動車株式会社
車両の排気漏れ検査装置および方法
10日前
日産自動車株式会社
電力変換装置の制御方法及び制御装置
4日前
日産自動車株式会社
車両走行制御装置及び車両走行制御方法
18日前
日産自動車株式会社
電動車両の制御方法及び電動車両の制御装置
3日前
日産自動車株式会社
データ記憶処理方法及びデータ記憶処理装置
今日
日産自動車株式会社
舵角センサの0点異常判定方法および判定装置
10日前
日産自動車株式会社
エンジントルク制御方法及びエンジントルク制御装置
4日前
日産自動車株式会社
エンジントルク制御方法及びエンジントルク制御装置
4日前
日産自動車株式会社
全固体電池、全固体電池システム及びシャットダウン方法
4日前
日産自動車株式会社
全固体二次電池用電極活物質層およびこれを用いた全固体二次電池
4日前
日産自動車株式会社
オープン巻線モータ制御方法、及び、オープン巻線モータ制御装置
3日前
個人
車両
4か月前
個人
飛行自動車
28日前
個人
授乳用車両
1か月前
個人
眼科手術車
2か月前
個人
自動車運転補助装置
3か月前
日本精機株式会社
表示装置
4日前
日本精機株式会社
表示装置
1か月前
井関農機株式会社
作業車両
1か月前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
5日前
日本精機株式会社
表示装置
2か月前
日本精機株式会社
照明装置
4日前
井関農機株式会社
作業車両
3か月前
個人
台車用車輪止め具
2か月前
株式会社松華
懸架装置
4日前
個人
キャンピングトレーラー
3か月前
日本精機株式会社
車載表示装置
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ