TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025035001
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141730
出願日
2023-08-31
発明の名称
測定モジュール及びロボットアーム
出願人
DIC株式会社
代理人
個人
,
個人
,
個人
主分類
G01N
11/10 20060101AFI20250306BHJP(測定;試験)
要約
【課題】より単純な構成で対象物の粘度の測定に寄与できる測定モジュールを提供する。
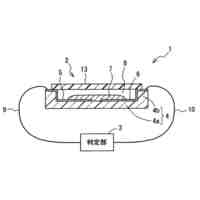
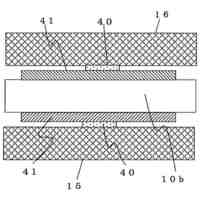
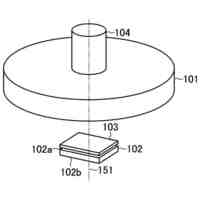
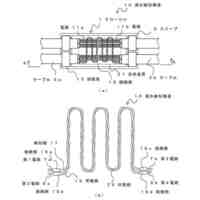
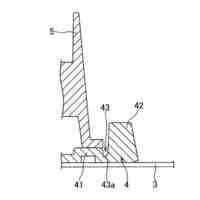
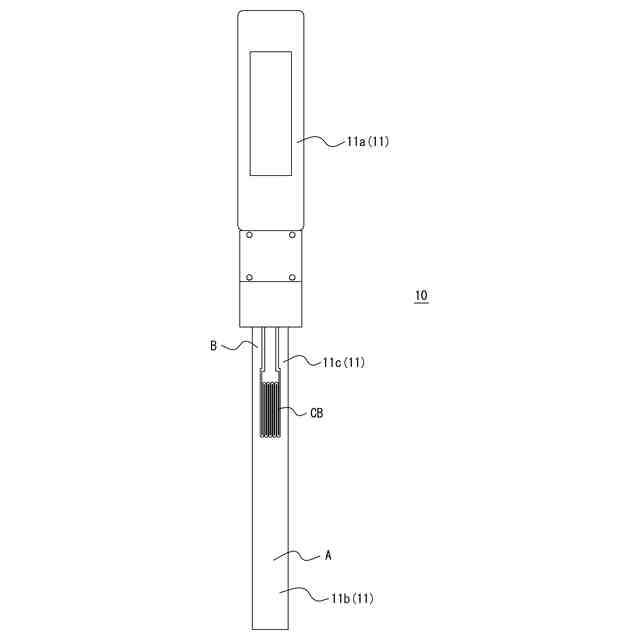
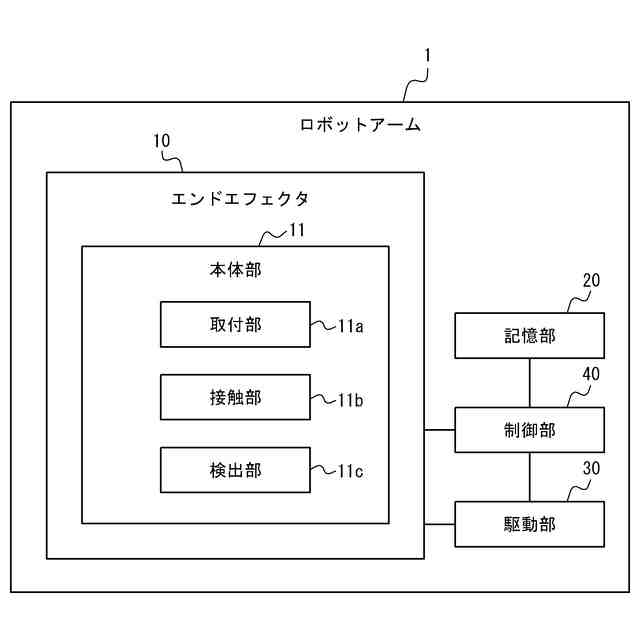
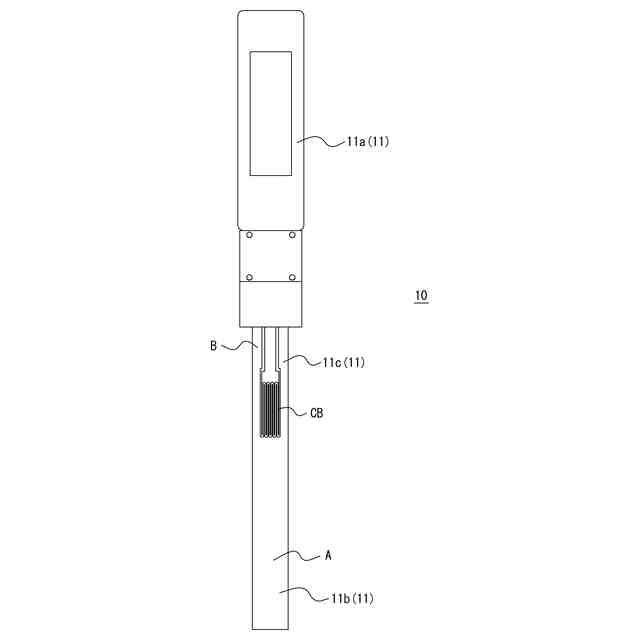
【解決手段】本開示に係る測定モジュール10は、対象物の粘度の測定に寄与する測定モジュール10であって、対象物に接触する接触部11bと、接触部11bに加わる力に応じて歪む検出部11cと、を備え、検出部11cは、樹脂を含有し、樹脂と一体的に形成され、検出部11cの歪みに応じて変化する電気信号を出力する回路CBを有する。
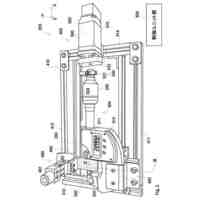
【選択図】図3
特許請求の範囲
【請求項1】
対象物の粘度の測定に寄与する測定モジュールであって、
対象物に接触する接触部と、
前記接触部に加わる力に応じて歪む検出部と、
を備え、
前記検出部は、
樹脂を含有し、
前記樹脂と一体的に形成され、前記検出部の歪みに応じて変化する電気信号を出力する回路を有する、
測定モジュール。
続きを表示(約 960 文字)
【請求項2】
請求項1に記載の測定モジュールであって、
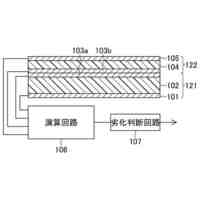
前記回路は、前記樹脂の表面に形成されている配線を有し、前記配線自体の電気抵抗に応じて変化する前記電気信号を出力する、
測定モジュール。
【請求項3】
請求項1に記載の測定モジュールであって、
前記回路は、前記樹脂と一体成形されている基板と、前記基板に形成されている配線とを有し、前記配線自体の電気抵抗に応じて変化する前記電気信号を出力する、
測定モジュール。
【請求項4】
請求項1乃至3のいずれか1項に記載の測定モジュールであって、
前記検出部は、前記対象物を撹拌するときの前記接触部の移動方向と交わる両側の面に一対の前記回路をそれぞれ有する、
測定モジュール。
【請求項5】
請求項1乃至3のいずれか1項に記載の測定モジュールであって、
前記検出部は、前記検出部において前記接触部よりも幅狭に形成されている部分に前記回路を有する、
測定モジュール。
【請求項6】
請求項5に記載の測定モジュールであって、
前記接触部と前記検出部とを接続し、前記接触部から前記検出部に向けて次第に先細りとなるテーパ部をさらに備える、
測定モジュール。
【請求項7】
請求項1乃至3のいずれか1項に記載の測定モジュールであって、
前記回路は、ひずみゲージを含む、
測定モジュール。
【請求項8】
請求項1乃至3のいずれか1項に記載の測定モジュールであって、
前記対象物は、非ニュートン性の液体を含む、
測定モジュール。
【請求項9】
請求項1乃至3のいずれか1項に記載の測定モジュールであって、
前記樹脂は、熱可塑性樹脂を含む、
測定モジュール。
【請求項10】
請求項9に記載の測定モジュールであって、
前記熱可塑性樹脂は、エンジニアリングプラスチック又はスーパーエンジニアリングプラスチックからなる群から選択される少なくとも1種を含む、
測定モジュール。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、測定モジュール及びロボットアームに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
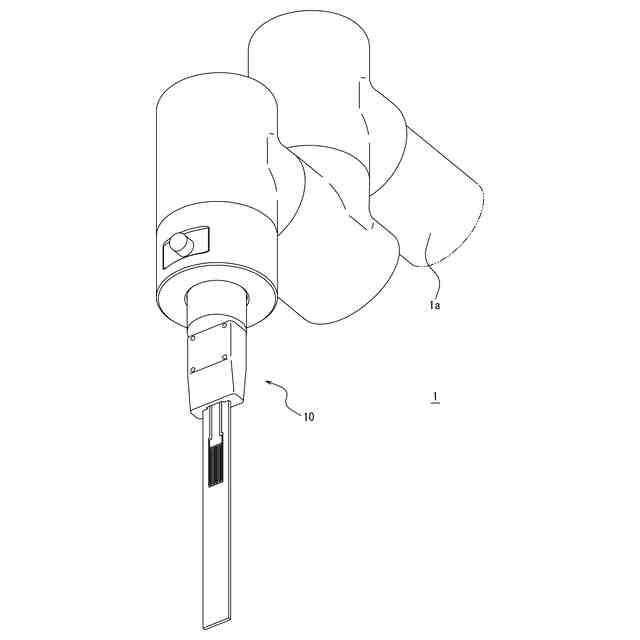
従来、製造現場などで用いられる産業用のもの、医療用のもの、及び介護用のものなど、様々な用途のロボットアームが知られている。加えて、ロボットアームの先端に取り付けられる、ロボットハンド及びロボットグリッパなどを含むエンドエフェクタに関連する技術が知られている。
【0003】
例えば、特許文献1には、食品産業、製薬、化学、及び建設業などを含む粘性体を扱う産業において、粘性体の練り具合が最終製品の良否を決める重要な品質指標になることが記載されている。特許文献1には、粘性体中で平均的練り具合を計測できるように、かき混ぜる運動をもつセンサとしての装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2010-151705号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
このような測定モジュールとして用いられるエンドエフェクタに対して、ロボットアームの重量制限のため、部品点数の削減、小型化、及び軽量化が要求されている。加えて、感染症の拡大の防止及びその他の衛生面を目的としてエンドエフェクタを洗浄できるように、エンドエフェクタについて防水性及び耐水性が要求されている。一般的に、エンドエフェクタは、金属製であり、重く、洗浄時には錆びるという課題があった。
【0006】
エンドエフェクタは、動作を行うにあたりセンサ部品を必要とするのが一般的であった。例えば、エンドエフェクタが対象物の撹拌を行いながら当該対象物の粘度の測定に寄与しようとする場合、特許文献1に記載の従来技術のように、ひずみゲージなどのセンサ部品がエンドエフェクタに付加的に搭載される。これにより、エンドエフェクタの小型化及び軽量化が困難となっていた。
【0007】
本開示は、より単純な構成で対象物の粘度の測定に寄与できる測定モジュール及びロボットアームを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記の課題を解決するための第1の観点による測定モジュールは、
対象物の粘度の測定に寄与する測定モジュールであって、
対象物に接触する接触部と、
前記接触部に加わる力に応じて歪む検出部と、
を備え、
前記検出部は、
樹脂を含有し、
前記樹脂と一体的に形成され、前記検出部の歪みに応じて変化する電気信号を出力する回路を有する。
【0009】
第2の観点によるロボットアームは、
上記の測定モジュールを備える。
【発明の効果】
【0010】
本開示によれば、より単純な構成で対象物の粘度の測定に寄与できる測定モジュール及びロボットアームを提供可能である。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社大真空
センサ
13日前
東レ株式会社
液体展開用シート
28日前
アズビル株式会社
湿度センサ
21日前
株式会社トプコン
植物センサ
24日前
日本精機株式会社
基板及び表示装置
1日前
日本FC企画株式会社
特性試験装置
9日前
日本碍子株式会社
ガスセンサ
6日前
学校法人同志社
測位システム
1日前
株式会社ミツトヨ
エンコーダ
7日前
アズビル株式会社
圧力センサ
6日前
キヤノン電子株式会社
サーボ加速度計
28日前
株式会社ミツトヨ
自動測定装置
今日
株式会社クボタ
作業車両
27日前
キヤノン電子株式会社
サーボ加速度計
28日前
キヤノン電子株式会社
サーボ加速度計
28日前
株式会社ミツトヨ
変位測定装置
20日前
株式会社小野測器
回転計測装置
20日前
株式会社東芝
センサ
20日前
株式会社東芝
センサ
6日前
本多電子株式会社
水中探知装置
今日
アズビル株式会社
濃度計測装置
今日
株式会社ミツトヨ
自動測定装置
今日
エスペック株式会社
環境試験装置
6日前
アズビル株式会社
検査用プローブ
14日前
トヨタ自動車株式会社
異音解析方法
20日前
積水ハウス株式会社
測定治具
6日前
株式会社ノーリツ
温度センサ取付具
7日前
株式会社ノーリツ
温度センサ取付具
7日前
個人
レーザージャイロ応用重力場計測装置
8日前
アズビル株式会社
回転角度計測装置
今日
古河電気工業株式会社
漏水検知構造
7日前
株式会社桧鉄工所
流速計
今日
トヨタ自動車株式会社
NVH解析装置
20日前
矢崎総業株式会社
計器装置
今日
矢崎総業株式会社
計器装置
今日
矢崎総業株式会社
計器装置
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ