TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025034946
公報種別
公開特許公報(A)
公開日
2025-03-13
出願番号
2023141642
出願日
2023-08-31
発明の名称
疑似ペットシステム
出願人
学校法人 中央大学
代理人
個人
,
個人
,
個人
,
個人
主分類
G06N
3/008 20230101AFI20250306BHJP(計算;計数)
要約
【課題】ユーザが飽きにくい疑似ペットシステムを提供する。
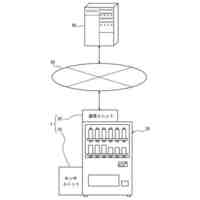
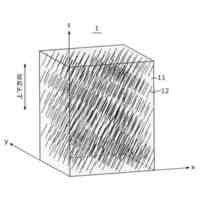
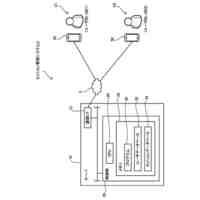
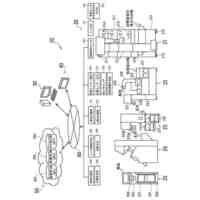
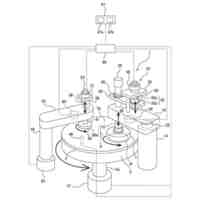
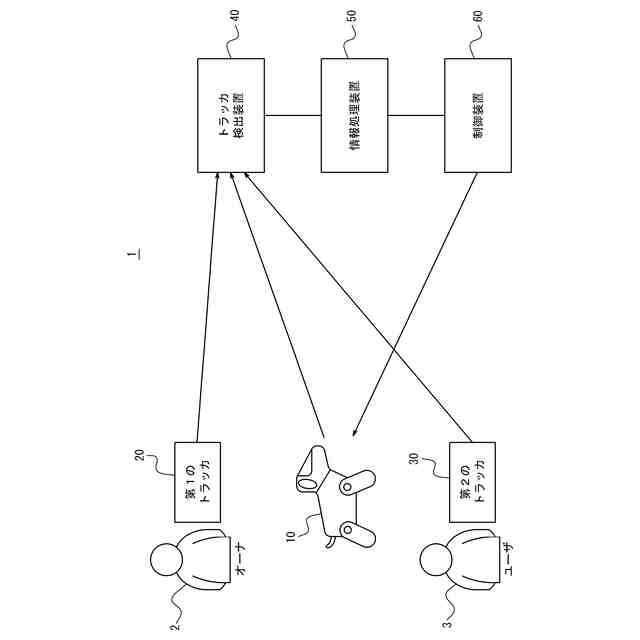
【解決手段】疑似ペットシステム1は、ペット型ロボット10と、第1のトラッカ20と、第2のトラッカ30と、トラッカ検出装置40と、情報処理装置50と、制御装置60と、を備える。情報処理装置50は、ペット型ロボット10が移動する範囲の空間を複数のセルに分割して定義し、各セルについて、第1のストレスと、第2のストレスと、第3のストレスとを算出し、第1のストレスと、第2のストレスと、第3のストレスとの和である総合ストレスが最小となるセルをペット型ロボット10の移動先のセルとして算出する。
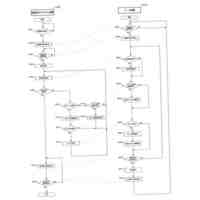
【選択図】図1
特許請求の範囲
【請求項1】
ペット型ロボットと、
オーナによって装着される第1のトラッカと、
ユーザによって装着される第2のトラッカと、
前記ペット型ロボットの位置を検出し、前記第1のトラッカによって前記オーナの位置を検出し、前記第2のトラッカによって前記ユーザの位置及び姿勢を検出するトラッカ検出装置と、
前記ペット型ロボットの位置と、前記オーナの位置と、前記ユーザの位置及び姿勢とに基づいて、前記ペット型ロボットの移動先のセルを算出する情報処理装置と、
前記情報処理装置から取得した指令に基づいて前記ペット型ロボットの動作を制御する制御装置と、
を備え、
前記情報処理装置は、
前記ペット型ロボットが移動する範囲の空間を複数のセルに分割して定義し、
前記複数のセルの各セルについて、第1のストレスと、第2のストレスと、第3のストレスとを算出し、
前記第1のストレスと、前記第2のストレスと、前記第3のストレスとの和である総合ストレスが最小となるセルを前記ペット型ロボットの移動先のセルとして算出し、
前記第1のストレスは、前記オーナから離れることによって生じるストレスであり、前記オーナの位置と前記各セルとの間の距離に基づいて算出され、
前記第2のストレスは、前記ユーザと関わりたい欲求によって生じるストレスであり、前記ユーザの位置と前記各セルとの間の距離と、前記ペット型ロボットと前記ユーザとのインタラクションの回数とに基づいて算出され、
前記第3のストレスは、周囲の環境を探索したい欲求によって生じるストレスであり、前記ペット型ロボットの位置と前記各セルとの間の距離に基づいて算出される、疑似ペットシステム。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の疑似ペットシステムにおいて、
前記情報処理装置は、前記ペット型ロボットが前記移動先のセルまで移動する際の移動速度を、前記ペット型ロボットが現在いるセルの前記総合ストレスの値と、前記移動先のセルの前記総合ストレスの値との差分に基づいて算出する、疑似ペットシステム。
【請求項3】
請求項1に記載の疑似ペットシステムにおいて、
前記情報処理装置は、
前記ペット型ロボットが現在いるセルの前記第1のストレス、前記第2のストレス及び前記第3のストレスと、前記移動先のセルの前記第1のストレス、前記第2のストレス及び前記第3のストレスとの差分をそれぞれ算出し、
前記第1のストレスの差分、前記第2のストレスの差分及び前記第3のストレスの差分のうちいずれの差分が最も大きいかに基づいて、前記ペット型ロボットが前記移動先のセルまで移動する際に、前記オーナ、前記ユーザ及び前記移動先のセルのうちのいずれに前記ペット型ロボットが目線を向けるかを決定する、疑似ペットシステム。
【請求項4】
請求項1に記載の疑似ペットシステムにおいて、
前記情報処理装置は、
前記オーナの位置を中心とし、基準距離を半径とする円を設定し、
前記ペット型ロボットが前記円の外に出ると、前記ペット型ロボットを前記円の内側に戻す力が働くように、前記ペット型ロボットを制御する、疑似ペットシステム。
【請求項5】
請求項1に記載の疑似ペットシステムにおいて、
前記情報処理装置は、前記ペット型ロボットが前記総合ストレスの値が最小のセルにいる場合と前記総合ストレスの値が最小でないセルにいる場合とで、前記ユーザから前記ペット型ロボットへのインタラクションに対する前記ペット型ロボットの振る舞いを異なる振る舞いとする、疑似ペットシステム。
【請求項6】
ユーザによって装着されるトラッカと、
前記ユーザによって装着され、仮想ペット及び仮想オーナを表示するヘッドマウントディスプレイと、
前記トラッカによって前記ユーザの位置及び姿勢を検出するトラッカ検出装置と、
前記仮想ペットの位置と、前記仮想オーナの位置と、前記ユーザの位置及び姿勢とに基づいて、前記仮想ペットの移動先のセルを算出する情報処理装置と、
前記情報処理装置から取得した指令に基づいて、前記ヘッドマウントディスプレイが表示する前記仮想ペットの動作を制御する制御装置と、
を備え、
前記情報処理装置は、
前記ヘッドマウントディスプレイが表示する仮想空間を複数のセルに分割して定義し、
前記複数のセルの各セルについて、第1のストレスと、第2のストレスと、第3のストレスとを算出し、
前記第1のストレスと、前記第2のストレスと、前記第3のストレスとの和である総合ストレスが最小となるセルを前記仮想ペットの移動先のセルとして算出し、
前記第1のストレスは、前記仮想オーナから離れることによって生じるストレスであり、前記仮想オーナの位置と前記各セルとの間の距離に基づいて算出され、
前記第2のストレスは、前記ユーザと関わりたい欲求によって生じるストレスであり、前記ユーザの位置と前記各セルとの間の距離と、前記仮想ペットと前記ユーザとのインタラクションの回数とに基づいて算出され、
前記第3のストレスは、周囲の環境を探索したい欲求によって生じるストレスであり、前記仮想ペットの位置と前記各セルとの間の距離に基づいて算出される、疑似ペットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、疑似ペットシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ペット型ロボットのような疑似ペットが知られている。例えば、特許文献1は、ユーザとの関係性を示すパラメータである「なつき度」に応じてペット型ロボットの振る舞いが変わるシステムを開示している。
【0003】
ペット型ロボットとの触れ合いは、認知症、精神疾患などの改善及び予防に効果があることが知られている。ペット型ロボットのような疑似ペットとの触れ合いによって、精神疾患を予防する活動は、ロボット介在活動(RAA:Robot Assisted Activity)とも称され、研究が進められている。
【先行技術文献】
【特許文献】
【0004】
特開2001-51970号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
疑似ペットの振る舞いを「なつき度」だけに応じて変化させていくと、ある程度以上の「なつき度」になると同じ振る舞いが続くためユーザが飽きてしまう。ユーザが飽きると、ユーザの疑似ペットに対する関心を維持することが困難になり、ユーザと疑似ペットとの間のインタラクションが減ってしまうという問題があった。
【0006】
かかる観点に鑑みてなされた本発明の目的は、ユーザが飽きにくい疑似ペットシステムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一実施形態に係る疑似ペットシステムは、
ペット型ロボットと、
オーナによって装着される第1のトラッカと、
ユーザによって装着される第2のトラッカと、
前記ペット型ロボットの位置を検出し、前記第1のトラッカによって前記オーナの位置を検出し、前記第2のトラッカによって前記ユーザの位置及び姿勢を検出するトラッカ検出装置と、
前記ペット型ロボットの位置と、前記オーナの位置と、前記ユーザの位置及び姿勢とに基づいて、前記ペット型ロボットの移動先のセルを算出する情報処理装置と、
前記情報処理装置から取得した指令に基づいて前記ペット型ロボットの動作を制御する制御装置と、
を備え、
前記情報処理装置は、
前記ペット型ロボットが移動する範囲の空間を複数のセルに分割して定義し、
前記複数のセルの各セルについて、第1のストレスと、第2のストレスと、第3のストレスとを算出し、
前記第1のストレスと、前記第2のストレスと、前記第3のストレスとの和である総合ストレスが最小となるセルを前記ペット型ロボットの移動先のセルとして算出し、
前記第1のストレスは、前記オーナから離れることによって生じるストレスであり、前記オーナの位置と前記各セルとの間の距離に基づいて算出され、
前記第2のストレスは、前記ユーザと関わりたい欲求によって生じるストレスであり、前記ユーザの位置と前記各セルとの間の距離と、前記ペット型ロボットと前記ユーザとのインタラクションの回数とに基づいて算出され、
前記第3のストレスは、周囲の環境を探索したい欲求によって生じるストレスであり、前記ペット型ロボットの位置と前記各セルとの間の距離に基づいて算出される。
【0008】
また、本発明の一実施形態に係る疑似ペットシステムにおいて、
前記情報処理装置は、前記ペット型ロボットが前記移動先のセルまで移動する際の移動速度を、前記ペット型ロボットが現在いるセルの前記総合ストレスの値と、前記移動先のセルの前記総合ストレスの値との差分に基づいて算出してもよい。
【0009】
また、本発明の一実施形態に係る疑似ペットシステムにおいて、
前記情報処理装置は、
前記ペット型ロボットが現在いるセルの前記第1のストレス、前記第2のストレス及び前記第3のストレスと、前記移動先のセルの前記第1のストレス、前記第2のストレス及び前記第3のストレスとの差分をそれぞれ算出し、
前記第1のストレスの差分、前記第2のストレスの差分及び前記第3のストレスの差分のうちいずれの差分が最も大きいかに基づいて、前記ペット型ロボットが前記移動先のセルまで移動する際に、前記オーナ、前記ユーザ及び前記移動先のセルのうちのいずれに前記ペット型ロボットが目線を向けるかを決定してもよい。
【0010】
また、本発明の一実施形態に係る疑似ペットシステムにおいて、
前記情報処理装置は、
前記オーナの位置を中心とし、基準距離を半径とする円を設定し、
前記ペット型ロボットが前記円の外に出ると、前記ペット型ロボットを前記円の内側に戻す力が働くように、前記ペット型ロボットを制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
学校法人 中央大学
管内径推定装置
2か月前
学校法人 中央大学
浸水検知システム
1か月前
学校法人 中央大学
視認性評価システム
18日前
学校法人 中央大学
人工筋アクチュエータ装置
今日
学校法人 中央大学
ポンプユニット及びポンプ
2か月前
学校法人 中央大学
異方変形弾性体及びこれを利用した推進機構
1か月前
株式会社荏原製作所
ワークピースの化学機械研磨システムおよび化学機械研磨方法
26日前
個人
対話装置
1か月前
個人
裁判のAI化
18日前
個人
情報処理装置
1か月前
個人
情報処理システム
25日前
個人
情報処理装置
1か月前
個人
検査システム
27日前
個人
記入設定プラグイン
1か月前
個人
介護情報提供システム
4日前
個人
設計支援システム
10日前
個人
設計支援システム
10日前
キヤノン電子株式会社
携帯装置
26日前
個人
情報入力装置
1か月前
株式会社サタケ
籾摺・調製設備
26日前
個人
不動産売買システム
1か月前
個人
物価スライド機能付生命保険
1か月前
株式会社カクシン
支援装置
13日前
個人
マイホーム非電子入札システム
1か月前
個人
備蓄品の管理方法
25日前
個人
ジェスチャーパッドのガイド部材
3日前
サクサ株式会社
中継装置
今日
株式会社BONNOU
管理装置
1か月前
サクサ株式会社
中継装置
26日前
キヤノン株式会社
情報処理装置
26日前
キヤノン株式会社
情報処理装置
26日前
アスエネ株式会社
排水量管理方法
26日前
株式会社寺岡精工
システム
3日前
サクサ株式会社
カードの制動構造
1か月前
東洋電装株式会社
操作装置
26日前
株式会社ワコム
電子消去具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ