TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095662
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211814
出願日
2023-12-15
発明の名称
異方変形弾性体及びこれを利用した推進機構
出願人
学校法人 中央大学
代理人
個人
主分類
F03G
3/00 20060101AFI20250619BHJP(液体用機械または機関;風力原動機,ばね原動機,重力原動機;他類に属さない機械動力または反動推進力を発生するもの)
要約
【課題】例えば、ロボットなどの小型化などにおいて簡便な方法で推進力を得ることが可能な異方変形弾性体及びこれを利用した推進装置を提供する。
【解決手段】粘弾性を有する素材で形成された弾性体と、弾性体の全体に分布して内包され、一方向に向けて線状に延長するように配向された複数の配向物と、を備え、配向物がひも状の連続体又は粒子状の素材のクラスターにより形成され、一方向の負荷を加えたときに特定の方向に変形し、除荷したときに元の形状に復元する構成とした。
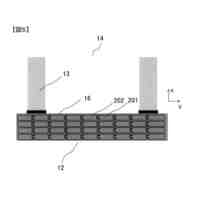
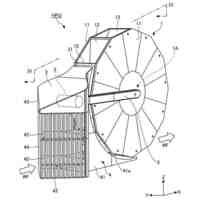
【選択図】図1
特許請求の範囲
【請求項1】
粘弾性を有する素材で形成された弾性素材部と、
前記弾性素材部の全体に分布して内包され、一方向に向けて線状に延長するように配向された複数の配向物と、を備え、
弾性素材部に一方向の負荷を加えたときに特定の方向に変形し、除荷したときに元の形状に復元する異方変形弾性体。
続きを表示(約 280 文字)
【請求項2】
前記配向物は、繊維である請求項1に記載の異方変形弾性体。
【請求項3】
前記配向物は、磁性を有する粒子状の素材のクラスターにより形成された請求項1に記載の異方変形弾性体。
【請求項4】
請求項1に記載の異方変形弾性体への前記負荷を力学的なものとし、前記配向物の延長方向に交差するように前記負荷を周期的に付与することで推進する推進機構。
【請求項5】
請求項2に記載の異方変形弾性体への前記負荷を磁力的なものとし、前記配向物の延長方向に交差するように前記負荷を周期的に付与することで推進する推進機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、変形に異方性が得られる異方変形弾性体及びこれを利用した推進機構に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、様々な自走式ロボットが提案されている。自然界における生物の運動を利用したもの、例えば、蠕動運動を利用して特許文献1に示すようなロボットが提案されている。特許文献1に示すロボットは、管内という限られた空間内の移動に好適とされている。
【先行技術文献】
【特許文献】
【0003】
特開2021-162547号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、管の内径が細くなるとロボットを小型化する必要が生じる。このようなロボットの小型化において、ロボットを自走させるための推進機構にある程度の大きさが必要とされ、ロボットの小型化の妨げとなっている。
そこで、本発明は上記課題を解決すべくなされたものであり、例えば、ロボットの小型化を可能とする異方変形弾性体及びこれを利用した推進機構を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するための異方変形弾性体の構成として、粘弾性を有する素材で形成された弾性素材部と、前記弾性素材部の全体に分布して内包され、一方向に向けて線状に延長するように配向された複数の配向物と、を備え、弾性素材部に一方向の負荷を加えたときに特定の方向に変形し、除荷したときに元の形状に復元する構成とした。
本構成によれば、配向物が弾性素材部の弾性係数に異方性を生じさせ、一方向の負荷を加えたときに特定の方向に変形させ、除荷したときに元の形状に復元させることができる。
また、前記配向物は、繊維や磁性を有する粒子状の素材のクラスターにより形成されたものを利用できる。
また、上記課題を解決するための推進機構の構成として、請求項1又は請求項2に記載の異方変形弾性体への前記負荷を力学的なものとし、前記配向物の延長方向に交差するように前記負荷を周期的に付与する構成とした。
本構成によれば、簡単な構成で推進機構を構成することができるので、この推進機構をロボットに利用することによりロボットの小型化に寄与することができる。
また、上記課題を解決するための推進機構の他の構成として、請求項2に記載の異方変形弾性体への前記負荷を磁力的なものとし、前記配向物の延長方向に交差するように前記負荷を周期的に付与することで推進する構成とした。
本構成によれば、簡単な構成で推進機構を構成することができるので、この推進機構をロボットに利用することによりロボットの小型化に寄与することができる。
【図面の簡単な説明】
【0006】
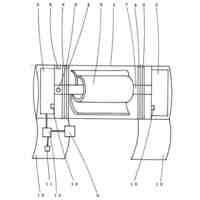
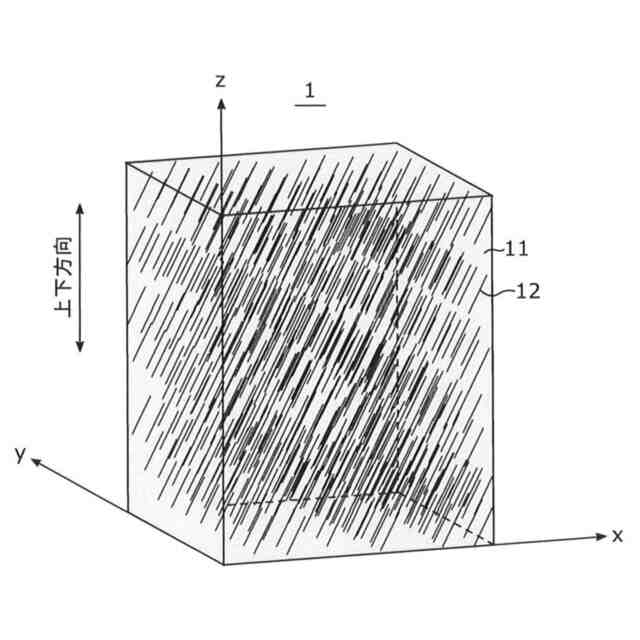
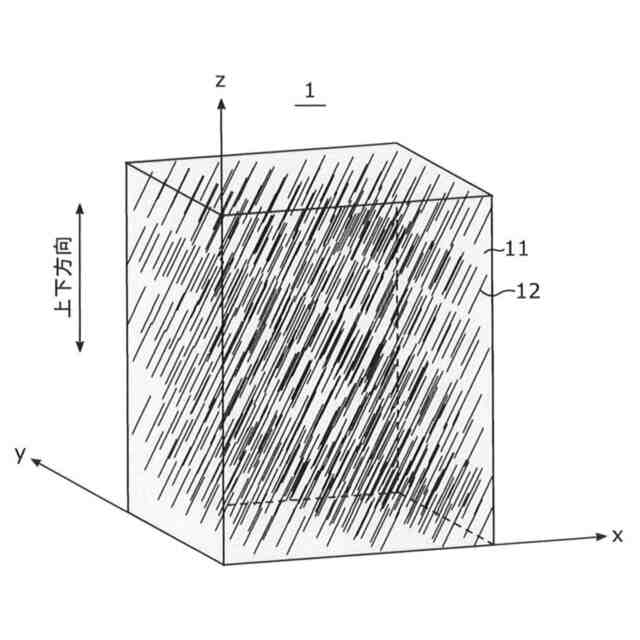
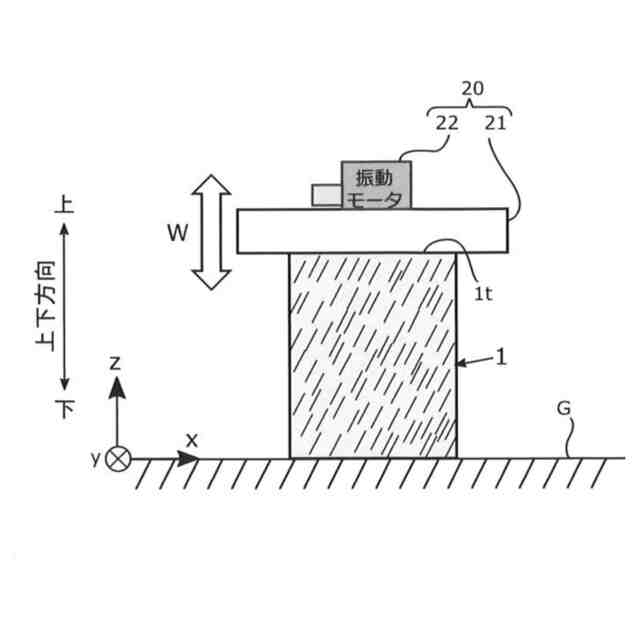
振動異方変形弾性体の一実施形態を示す概略構成図である。
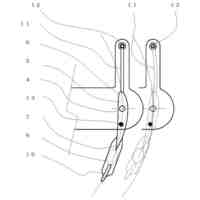
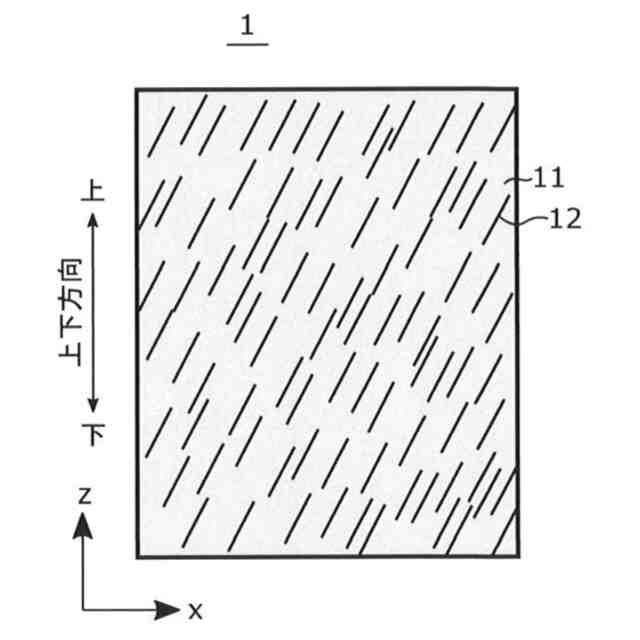
図1における異方変形弾性体をxz面で平面視した図である。
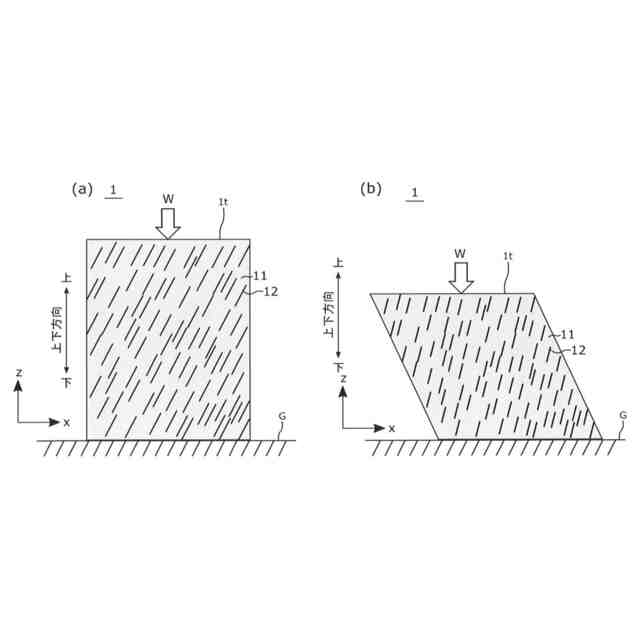
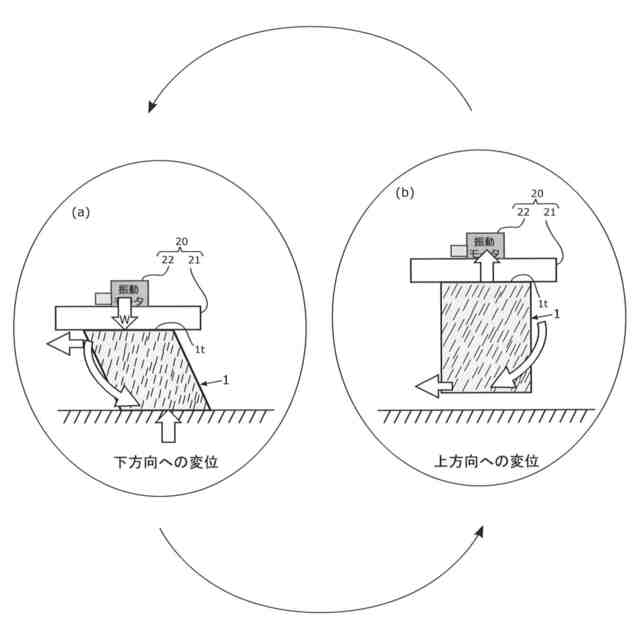
異方変形弾性体の動作を示す図である。
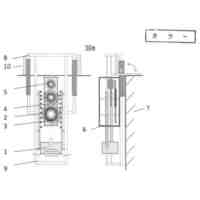
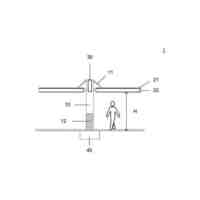
異方変形弾性体の利用形態の一例を示す図である。
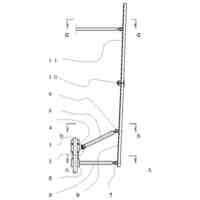
図4に示す利用形態の動作を示す図である。
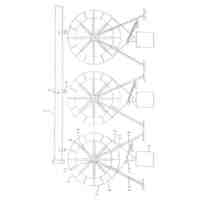
異方変形弾性体の利用形態の一例を示す図である。
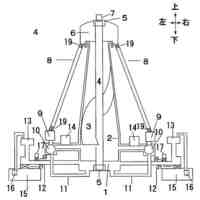
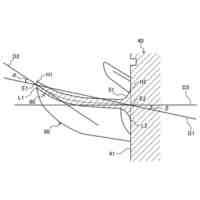
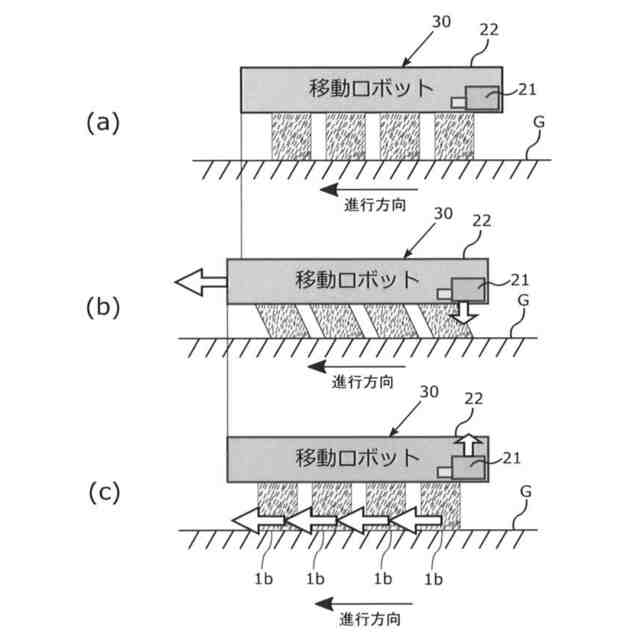
異方変形弾性体をロボットにおける推進手段として利用した場合の推進動作を示す図である。
【発明を実施するための形態】
【0007】
以下、発明の実施形態を通じて本発明を詳説するが、以下の実施形態は特許請求の範囲に係る発明を限定するものではなく、また実施形態の中で説明される特徴の組み合わせのすべてが発明の解決手段に必須であるとは限らず、選択的に採用される構成を含むものである。
【0008】
図1は、異方変形弾性体の一実施形態を示す概略構成を示す透視図である。本実施形態に係る異方変形弾性体1は、力学的、或いは、磁場による負荷(外力)を加えることで変形に異方性が得られるように構成されている。
【0009】
図1に示すように、異方変形弾性体1は、弾性素材部11に複数の繊維12を分散して内挿されている。本実施形態では、図1に示すように、異方変形弾性体1の形状を直方体形状として説明するがその立体形状は特に限定されない。なお、以下の説明では、図1中の矢印で示すように、異方変形弾性体1の各辺に沿ってx方向、y方向、z方向として説明する。z方向は、異方変形弾性体1の最も長い辺に対応する。
【0010】
弾性素材部11は、例えば、粘弾性やゴム弾性を有する素材で形成すると良い。弾性素材部11は、例えば、シリコーンゴム等の合成ゴムや、天然ゴム等を有するものや、エラストマ、ゲルなどを素材として利用することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
風力発電機
2か月前
個人
小水力発電器
今日
個人
磁力スロープ
2か月前
個人
風車用回転翼
2か月前
個人
波力発電装置
2か月前
個人
折り畳み式風車
2か月前
個人
閉空間推進移動装置
1か月前
個人
風力発電装置
1か月前
東レ株式会社
風車ブレード
1か月前
個人
水力発電用水の循環活動
15日前
個人
波受け板を用いた波浪発電装置
7日前
株式会社 林物産発明研究所
発電装置
25日前
株式会社ゲットクリーンエナジー
発電機
1か月前
個人
水車発電と水の循環供給装置
1か月前
株式会社リコー
水力発電装置
2か月前
三菱電機株式会社
風力発電システム
15日前
株式会社ライトエンジ
推力発生方法
15日前
株式会社アイシン
発電装置
1か月前
株式会社アイシン
発電装置
2か月前
株式会社大林組
リフトアップ装置
26日前
株式会社大林組
リフトアップ装置
26日前
個人
波力発電ユニット及び波力発電システム
1か月前
三菱重工業株式会社
風力発電装置
11日前
パナテックス株式会社
発電装置
1か月前
ダイキン工業株式会社
流体機械
6日前
株式会社日本海洋発電
海流発電システム
2か月前
日本精工株式会社
風力発電装置
2か月前
株式会社リアムウィンド
流体発電装置及び流体発電方法
1か月前
株式会社デンソー
熱音響装置
2か月前
個人
暴風・洪水でも折れず、風速・河川流速の増速が出来る風水車羽根装置
11日前
華能広西清潔能源有限公司
風力発電機の角度修正方法および修正装置
11日前
大成建設株式会社
浮体式基礎の製作方法
1か月前
株式会社サンノハシ
風力発電装置
2か月前
国立研究開発法人宇宙航空研究開発機構
電圧発生装置
2か月前
JOP株式会社
発電装置
2か月前
セイコーフューチャークリエーション株式会社
浮標発電装置
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ