TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025869
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023131073
出願日
2023-08-10
発明の名称
電動機の駆動装置
出願人
株式会社荏原製作所
,
学校法人東京電機大学
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
21/26 20160101AFI20250214BHJP(電力の発電,変換,配電)
要約
【課題】電動機に依存する定数を不要とし、電動機の制御性を向上させた駆動装置を提供する。
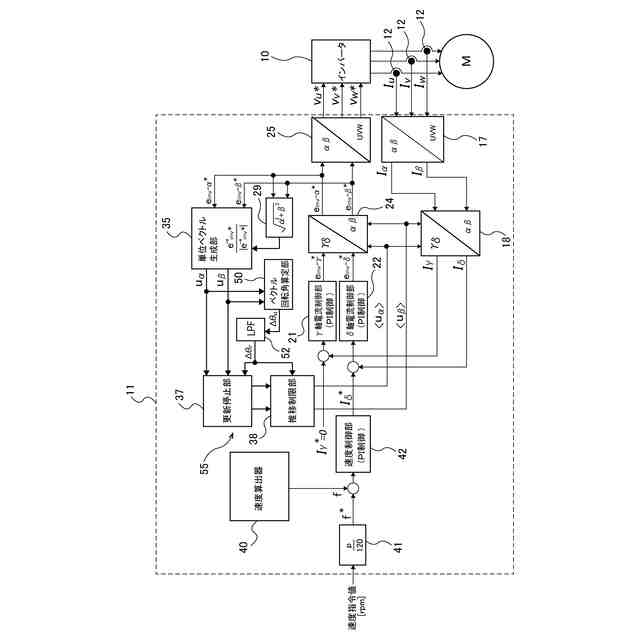
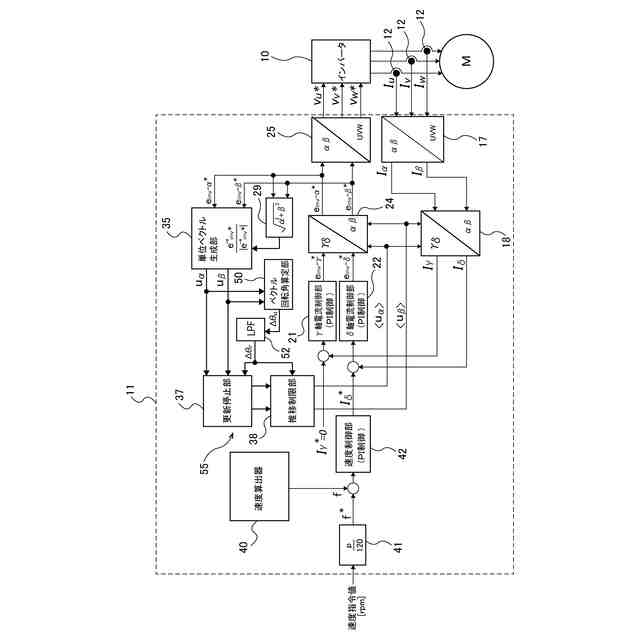
【解決手段】駆動装置のベクトル制御部11は、インバータ10への電圧指令値を成分に含む電圧指令ベクトルと同方向の単位ベクトルを生成する単位ベクトル生成部35と、ベクトル制御部11の1制御周期あたりの単位ベクトルの回転角Δθuを算定するベクトル回転角算定部50と、単位ベクトルの回転角Δθuからノイズを除去することで推定ロータ回転角Δθrを生成するローパスフィルタ52と、単位ベクトルをサンプリングし、推定ロータ回転角Δθrに基づいて出力ベクトル(<u
α
>,<u
β
>)を生成するサンプリング処理部55を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
インバータと、該インバータの出力電流を検出する電流検出器と、該インバータへの電圧指令値を決定するベクトル制御部とを備えた電動機の駆動装置であって、
前記ベクトル制御部は、
前記インバータへの電圧指令値を成分に含む電圧指令ベクトルと同方向の単位ベクトルを生成する単位ベクトル生成部と、
前記ベクトル制御部の1制御周期あたりの前記単位ベクトルの回転角を算定するベクトル回転角算定部と、
前記単位ベクトルの前記回転角からノイズを除去することで推定ロータ回転角を生成するローパスフィルタと、
前記単位ベクトルをサンプリングし、前記推定ロータ回転角に基づいて出力ベクトルを生成するサンプリング処理部を備えている、駆動装置。
続きを表示(約 570 文字)
【請求項2】
前記サンプリング処理部は、
前記単位ベクトルが更新範囲外にあるときに前記単位ベクトルの更新を停止する更新停止部と、
前記更新停止部から出力された前記単位ベクトルの移動量を制限範囲内に制限する推移制限部を備え、
前記更新範囲および前記制限範囲は、前記推定ロータ回転角に基づいて決定される、請求項1に記載の駆動装置。
【請求項3】
前記サンプリング処理部は、前記推定ロータ回転角を用いて、過去の出力ベクトルを1制御周期だけ進めた1次ホールドベクトルを算定するように構成されたベクトルスタビライザを備えている、請求項1に記載の駆動装置。
【請求項4】
前記ベクトルスタビライザは、
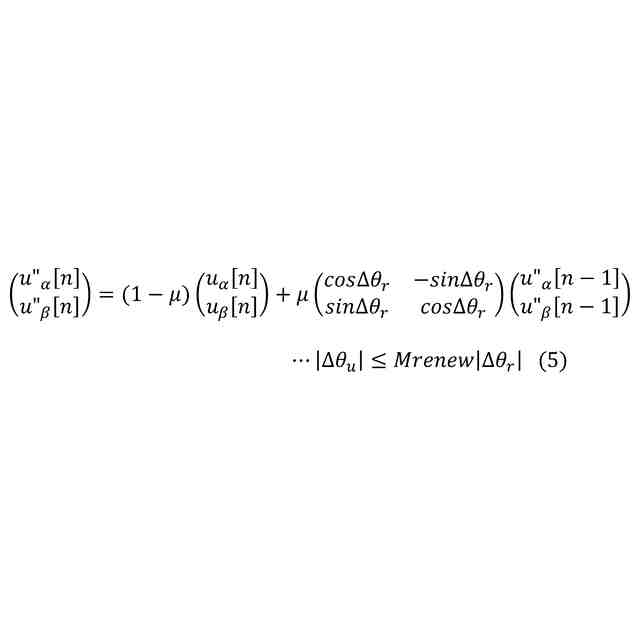
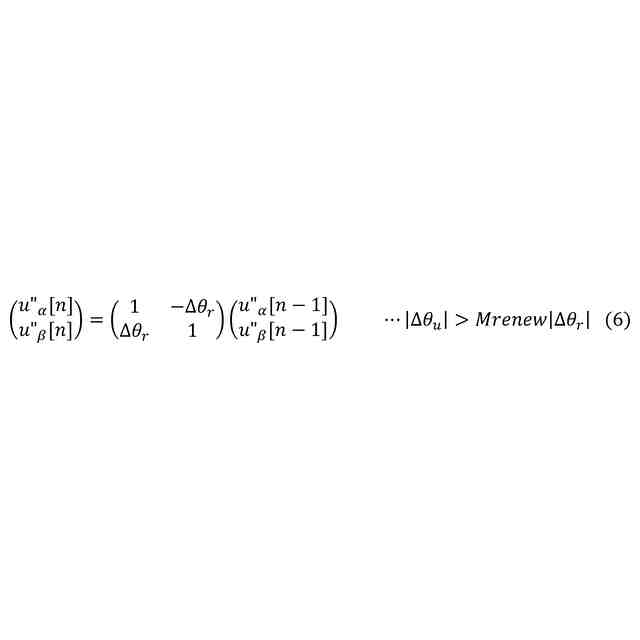
前記推定ロータ回転角の絶対値に所定の係数を乗算して得られた値が、前記単位ベクトルの前記回転角の絶対値よりも小さい場合は、前記1次ホールドベクトルを現在の出力ベクトルとして出力し、
前記推定ロータ回転角の絶対値に所定の係数を乗算して得られた値が、前記単位ベクトルの前記回転角の絶対値以上である場合は、前記単位ベクトルと前記1次ホールドベクトルとを所定の比で組み合わせたハイブリッド出力ベクトルを現在の出力ベクトルとして出力するように構成されている、請求項3に記載の駆動装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、同期モータや誘導モータなどの電動機を駆動する駆動装置に関し、特にインバータの出力電流に基づいてベクトル制御を行なう駆動装置に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から一般に用いられているモータの制御方法としては、指令周波数に対応する電圧を出力することにより、電動機磁束を一定に保つV/F制御や、インバータの出力電流を励磁電流とトルク電流に分解し、負荷に見合ったモータ電流を流せるように励磁電圧とトルク電圧を制御するベクトル制御が挙げられる。
【0003】
V/F制御は高速な演算を必要とせず、簡易な構成でモータを制御することが出来る。しかし、このV/F制御では、フィードバック情報が乏しいため、個々のモータの特性に合わせた高効率な制御は期待出来ない。また、モータロータの位置を検出しないため、同期機の場合はモータロータが脱調する可能性もある。
【0004】
一方、同期機の脱調を防止し、且つ、高価な位置センサを使用することなく同期機を制御することが出来る制御方式として、センサレスベクトル制御がある。このセンサレスベクトル制御は、位置センサを用いずに、フィードバックされたモータ電流からロータの位置を推定する制御方式である。
【0005】
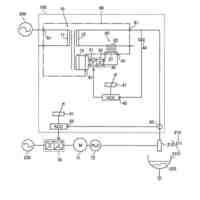
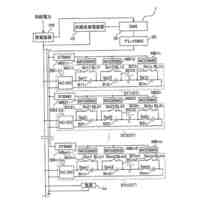
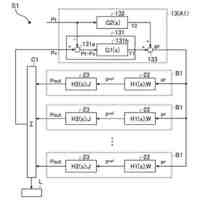
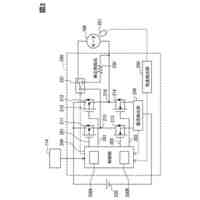
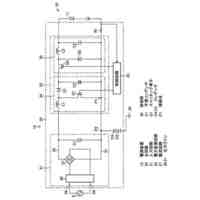
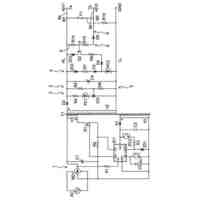
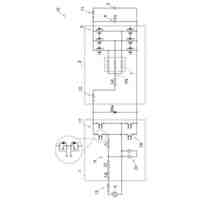
特許文献1には、ロータ用の位置センサを使用することなくモータを制御することが出来るセンサレスベクトル制御が開示されている。図7は、従来のセンサベクトル制御を示すブロック図である。図7に示すように、ベクトル制御部511は、電流検出器512により検出された三相電流Iu,Iv,Iwを静止座標系上の二相電流Iα,Iβに変換する3/2相変換部517と、静止座標系上の二相電流Iα,Iβを回転座標系上の二相電流Iγ,Iδに変換する静止/回転座標変換部518を備えている。δ軸はモータ端子電圧(インバータ出力電圧)のベクトル方向の軸であり、γ軸はδ軸に直交する軸である。
【0006】
ベクトル制御部511は、さらに、電流Iγとγ軸電流指令値Iγ*(=0)との偏差を最小とするための回転座標系上の電圧指令値e
INV
-γ*を生成するγ軸電流制御部521と、電流Iδとδ軸電流指令値Iδ*との偏差を最小とするための回転座標系上の電圧指令値e
INV
-δ*を生成するδ軸電流制御部522と、回転座標系上の電圧指令値e
INV
-γ*,e
INV
-δ*を静止座標系上の電圧指令値e
INV
-α*,e
INV
-β*に変換する回転/静止座標変換部524と、二相の電圧指令値e
INV
-α*,e
INV
-β*を三相の電圧指令値Vu*,Vv*,Vw*に変換する2/3相変換部525を備えている。γ軸電流制御部521およびδ軸電流制御部522は、PI制御器である。
【0007】
ベクトル制御部511は、さらに、静止座標系上の電圧指令値e
INV
-α*,e
INV
-β*を成分に持つベクトルe
→
INV
*の長さ|e
→
INV
*|を算定するベクトル長さ算定部529と、1制御周期あたりの回転角[rad]の推定値Δθe*を算定する回転角推定器531と、静止座標系上の電圧指令値e
INV
-α*,e
INV
-β*を成分に含む電圧指令ベクトルと同方向の単位ベクトル(u
α
,u
β
)を生成する単位ベクトル生成部535と、単位ベクトル(u
α
,u
β
)が、予め設定された更新範囲外にあるときに単位ベクトル(u
α
,u
β
)の更新を停止する更新停止部537と、単位ベクトル(u
α
,u
β
)の移動を、予め設定された制限範囲内に制限する推移制限部538を備えている。推移制限部538の出力<u
α
>,<u
β
>は、静止/回転座標変換部518および回転/静止座標変換部524に送られる。
【0008】
回転角推定器531は、ベクトル制御部11の制御周期Tc[s]、逆起電力定数Ke[Vs/rad](電気角速度当たりの一相起電力)、およびベクトル長さ|e
→
INV
*|から、1制御周期あたりの回転角[rad]の推定値Δθe*を算定するように構成される。
【0009】
単位ベクトル生成部535は、電圧指令値e
INV
-α*,e
INV
-β*を成分に含む電圧指令ベクトルe
→
INV
*をその長さ|e
→
INV
*|で割り算することで、単位ベクトル(u
α
,u
β
)を生成するように構成される。単位ベクトル生成部535は、制御周期Tcごとに単位ベクトルを生成する。
【0010】
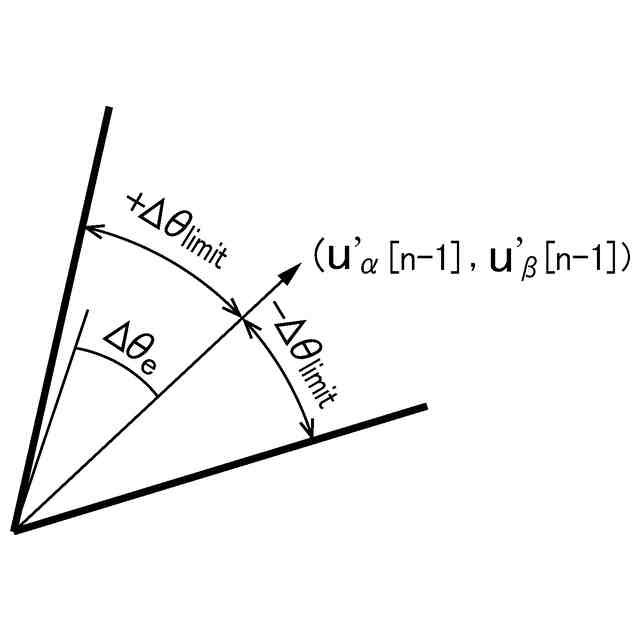
更新停止部537は、単位ベクトル生成部535によって生成された単位ベクトルが更新範囲内にあるときは、前回生成された単位ベクトルを、新たに生成された単位ベクトルに置き換え(すなわち単位ベクトルを更新し)、その一方で、単位ベクトル生成部535によって生成された単位ベクトルが更新範囲外にあるときは、単位ベクトルを更新せず、前回の単位ベクトルを出力する。このような機能を持つ更新停止部537の例としては、サンプル・ホールド回路が挙げられる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
モータ
5日前
株式会社東光高岳
開閉装置
26日前
株式会社デンソー
モータ
13日前
株式会社神戸製鋼所
電動機
6日前
住友ベークライト株式会社
ロータ
20日前
神保電器株式会社
配線器具取付枠
5日前
富士電機株式会社
電源装置
20日前
住友電装株式会社
電気接続箱
5日前
個人
路面走行車両を利用した発電システム
6日前
スワン電器株式会社
電源装置
20日前
住友電装株式会社
電気接続箱
13日前
個人
太陽光発電電力活用プラットフォーム
5日前
東洋電装株式会社
駆動制御装置
20日前
矢崎総業株式会社
蓄電システム
6日前
株式会社アイシン
巻線界磁型回転電機
20日前
ミネベアミツミ株式会社
モータ
12日前
株式会社ダイヘン
電力システム
5日前
富士電機株式会社
電力変換装置
20日前
株式会社ダイヘン
電圧調整装置
20日前
富士電機株式会社
電力変換装置
5日前
富士電機株式会社
電力変換装置
27日前
株式会社日立製作所
回転電機
21日前
株式会社デンソートリム
モータ制御装置
21日前
東芝ライテック株式会社
電源装置
9日前
キヤノン株式会社
受電装置および送電装置
13日前
愛知電機株式会社
電動シュレッダとその駆動方法
13日前
株式会社エフ・シー・シー
太陽光発電装置
12日前
株式会社エフ・シー・シー
太陽光発電装置
12日前
日新電機株式会社
ガス絶縁開閉装置
9日前
ニチコン株式会社
スイッチングレギュレータ
26日前
株式会社TMEIC
電力変換装置
12日前
株式会社アイシン
車載充電装置
20日前
株式会社シマノ
発電装置
12日前
木谷電器株式会社
監視システム及び監視方法
12日前
株式会社アイシン
車載充電装置
20日前
株式会社アイシン
車載充電装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ