TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025025167
公報種別
公開特許公報(A)
公開日
2025-02-21
出願番号
2023129706
出願日
2023-08-09
発明の名称
比容積計測システムおよび比容積算出方法
出願人
味の素株式会社
,
株式会社粉研パウテックス
代理人
弁理士法人秀和特許事務所
主分類
G01F
11/24 20060101AFI20250214BHJP(測定;試験)
要約
【課題】粉粒体の比容積を処理の工程で自動的に計測可能な技術を提供する。
【解決手段】比容積計測システムは、外周縁部の上面と周壁部の周壁面と仕切り板の下面と筒状体の側面とで形成される断面領域および同心回転の回転回数に応じた所定体積の粉粒体を連続して排出口から排出させる粉体供給機と、少なくとも、粉粒体の物理的特性に応じて設定された撹拌体の撹拌羽根の水平面に対する傾き角度、および、撹拌体と供給盤とが回転する同一の回転速度を条件として粉体供給機を動作させるとともに、重量センサを介して周期間隔で取得された2つの重量値の差分である差分重量値を求めるとともに、差分重量値と、供給盤の単位回転毎に粉体供給機の排出口から排出される粉粒体の単位体積値と、所定の周期間隔における回転回数とに基づいて、粉粒体の比容積を算出する制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
供給された所定量の粉粒体を貯留するとともに、前記貯留された粉粒体を送出口から送出する上部貯留体と、前記上部貯留体から送出された粉粒体を収容する下部貯留体と、
前記下部貯留体の底部として前記下部貯留体の下方に接続し、底面部と、前記底面部に連なる周壁の一部に前記粉粒体を排出する排出口が形成された周壁部とを有する受容体と、
前記下部貯留体内で回転し、前記下部貯留体に収容された粉粒体を撹拌する撹拌体と、
前記下部貯留体と前記受容体との間に前記受容体の底部と平行して設けられ、前記受容体内で前記撹拌体と同心で回転し、前記撹拌体によって撹拌される粉粒体を移送して前記受容体の排出口に導入する流路が形成された供給盤と、を備え、
前記供給盤は、外周から所定幅の鍔状に形成された外周縁部と前記外周縁部の内側で外周縁部上面に対して段差を形成する筒状体とを含み、
前記受容体には、前記供給盤の上方に前記供給盤と平行し、前記供給盤上の粉粒体を所定高さに揃える仕切り板と、前記外周縁部上で前記供給盤の回転方向に移送される粉粒体を前記供給盤の外周の外側方向に偏向させる偏向板が設けられ、
前記供給盤は、前記外周縁部の上面と前記周壁部の周壁面と前記仕切り板の下面と前記筒状体の側面とで形成される断面領域および前記同心回転の回転回数に応じた所定体積の粉粒体を連続して前記排出口から排出させる、粉体供給機と、
所定量の粉粒体が供給された前記粉体供給機の重量を計測し、前記計測された重量に応じた信号を出力する重量センサと、
前記粉体供給機の供給盤の回転回数を計数する計数センサと、
少なくとも、前記粉粒体の物理的特性に応じて設定された前記撹拌体の撹拌羽根の水平面に対する傾き角度、および、前記撹拌体と前記供給盤とが回転する同一の回転速度を条件として前記粉体供給機を動作させるとともに、
前記重量センサを介して計測された前記粉体供給機の重量値を所定の周期間隔で取得し、前記所定の周期間隔の前後で取得された2つの前記重量値の差分である差分重量値を求めるとともに、前記差分重量値と、前記供給盤の単位回転毎に前記粉体供給機の排出口から排出される前記粉粒体の単位体積値と、前記所定の周期間隔における前記回転回数とに基づいて、前記粉粒体の比容積を算出する制御部と、
を備える比容積計測システム。
続きを表示(約 1,500 文字)
【請求項2】
前記制御部は、前記粉粒体の圧縮率が2パーセント以下において、前記撹拌羽根の水平面に対する傾き角度が45度から135度の範囲、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の前記排出口に到達できないロス量、粉体圧の少なくとも一つの補正量に基づいて補正を行い、前記比容積を算出する、請求項1に記載の比容積計測システム。
【請求項3】
前記制御部は、前記粉粒体の圧縮率が3パーセント以下において、前記撹拌羽根の水平面に対する傾き角度が45度以上かつ135度未満の範囲、かつ、前記回転速度が3rpmから9rpmの範囲を条件として前記粉体供給機を動作させる、請求項1に記載の比容積計測システム。
【請求項4】
前記制御部は、前記粉粒体の圧縮率が4.1パーセント未満において、前記撹拌羽根の水平面に対する傾き角度が45度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の前記排出口に到達できないロス量、粉体圧の少なくとも一つの補正量に基づいて補正を行い、前記比容積を算出する、請求項1に記載の比容積計測システム。
【請求項5】
前記制御部は、前記撹拌羽根の水平面に対する傾き角度が45度超から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の前記排出口に到達できないロス量に基づいて補正を行い、前記比容積を算出する、請求項4に記載の比容積計測システム。
【請求項6】
前記制御部は、前記撹拌羽根の水平面に対する傾き角度が45度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させる、請求項4に記載の比容積計測システム。
【請求項7】
前記制御部は、前記粉粒体の圧縮率が4.3パーセント未満において、前記撹拌羽根の水平面に対する傾き角度が45度から135度の範囲、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させる、請求項1に記載の比容積計測システム。
【請求項8】
前記制御部は、前記粉粒体の圧縮率が9.8パーセントから17.2パーセントにおいて、前記撹拌羽根の水平面に対する傾き角度が90度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の粉体圧を補正して前記比容積を算出する、請求項1に記載の比容積計測システム。
【請求項9】
前記制御部は、前記粉粒体の圧縮率が24.3パーセントを超える場合において、前記撹拌羽根の水平面に対する傾き角度が45度超かつ135度未満であり、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の粉体圧を補正して前記比容積を算出する、請求項1に記載の比容積計測システム。
【請求項10】
前記制御部は、前記粉体供給機に供給される粉粒体が上部貯留体に貯留される上限重量および下限重量を設定し、前記重量センサによって計測された前記粉体供給機の重量値が前記下限重量を下回ることを検知するとともに、前記上限重量を超えない供給量の粉粒体を前記上部貯留体に供給する、請求項1に記載の比容積計測システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、粉粒体の比容積を計測可能な比容積計測システムおよび比容積算出方法に関する。
続きを表示(約 6,400 文字)
【背景技術】
【0002】
従来から、粉体・顆粒(以下、粉粒体ともいう)の製造工程においては、製造対象の各種の粉粒体に対する比容積(単位質量(g)が占める容積(ml)、比容ともいう)の管理が行われる。比容積の計測は、例えば、特許文献1に開示される粉体供給機等が配置された製造ラインから粉粒体を採取し、JIS規格に対応した専用の比容計(例えば、かさ密度測定器等)を用いて計測する。製造ラインから粉を採取する際に、装置を一時停止することや(生産能力の低下要因)、系内を開放してスコップなどで採取すること(異物リスク。作業負担。)、など工場の状況に応じた課題がある。また比容計は手動でのデータ計測であるため、作業者による測定値のばらつきがあることや、計測値を自動的に解析して製造条件にフィードバックすることができず、製造条件の変更が人手の判断に依存する、などの様々な課題がある。
【先行技術文献】
【特許文献】
【0003】
特許第6137826号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明は、粉粒体の比容積を処理の工程で自動的に計測可能な技術の提供を目的とする。
【課題を解決するための手段】
【0005】
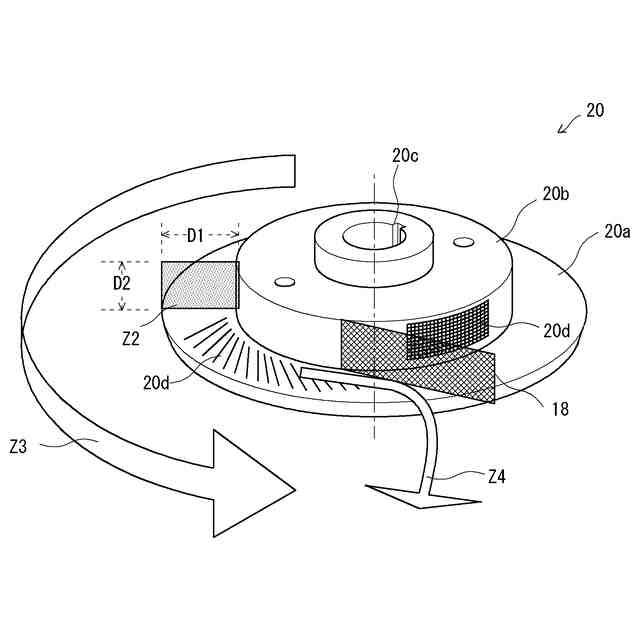
本発明者らは鋭意に検討を行い、次の構成を採用することで粉体供給機が上記課題を解決することを見出した。すなわち、一実施形態に係る比容積計測システムの粉体供給機は、供給された所定量の粉粒体を貯留するとともに、貯留された粉粒体を送出口から送出する上部貯留体と、上部貯留体から送出された粉粒体を収容する下部貯留体とを備える。そして、下部貯留体の底部として下部貯留体の下方に接続し、底面部と、底面部に連なる周壁の一部に粉粒体を排出する排出口が形成された周壁部とを有する受容体を配置し、下部貯留体内で回転し、下部貯留体に収容された粉粒体を撹拌する撹拌体を設ける。また、下部貯留体と受容体との間に受容体の底部と平行して設けられ、受容体内で撹拌体と同心で回転し、撹拌体によって撹拌される粉粒体を移送して受容体の排出口に導入する流路が形成された供給盤を設ける。供給盤は、外周から所定幅の鍔状に形成された外周縁部と外周縁部の内側で外周縁部上面に対して段差を形成する筒状体を含むように構成される。また、受容体には、供給盤の上方に供給盤と平行し、供給盤上の粉粒体を所定高さに揃える仕切り板と、外周縁部上で供給盤の回転方向に移送される粉粒体を供給盤の外周の外側方向に偏向させる偏向板が設けられる。そして、供給盤は、外周縁部の上面と周壁部の周壁面と仕切り板の下面と筒状体の側面とで形成される断面領域(矩形領域)および同心回転の回転回数に応じた所定体積の粉粒体を連続して排出口から排出させる。
そして、一実施形態に係る比容積計測システムの制御部は、少なくとも、粉粒体の物理的特性に応じて設定された撹拌体の撹拌羽根の水平面に対する傾き角度、および、撹拌体と供給盤とが回転する同一の回転速度を条件として粉体供給機を動作させる。重量センサを介して計測された粉体供給機の重量値を所定の周期間隔で取得し、所定の周期間隔の前後で取得された2つの重量値の差分である差分重量値を求めるとともに、差分重量値と、
供給盤の単位回転毎に粉体供給機の排出口から排出される粉粒体の単位体積値と、所定の周期間隔における回転回数とに基づいて、粉粒体の比容積を算出する。
【0006】
より詳細な構成は、以下の通りである。
[1]
供給された所定量の粉粒体を貯留するとともに、前記貯留された粉粒体を送出口から送出する上部貯留体と、
前記上部貯留体から送出された粉粒体を収容する下部貯留体と、
前記下部貯留体の底部として前記下部貯留体の下方に接続し、底面部と、前記底面部に連なる周壁の一部に前記粉粒体を排出する排出口が形成された周壁部とを有する受容体と、
前記下部貯留体内で回転し、前記下部貯留体に収容された粉粒体を撹拌する撹拌体と、
前記下部貯留体と前記受容体との間に前記受容体の底部と平行して設けられ、前記受容体内で前記撹拌体と同心で回転し、前記撹拌体によって撹拌される粉粒体を移送して前記受容体の排出口に導入する流路が形成された供給盤と、を備え、
前記供給盤は、外周から所定幅の鍔状に形成された外周縁部と前記外周縁部の内側で外周縁部上面に対して段差を形成する筒状体とを含み、
前記受容体には、前記供給盤の上方に前記供給盤と平行し、前記供給盤上の粉粒体を所定高さに揃える仕切り板と、前記外周縁部上で前記供給盤の回転方向に移送される粉粒体を前記供給盤の外周の外側方向に偏向させる偏向板が設けられ、
前記供給盤は、前記外周縁部の上面と前記周壁部の周壁面と前記仕切り板の下面と前記筒状体の側面とで形成される断面領域および前記同心回転の回転回数に応じた所定体積の粉粒体を連続して前記排出口から排出させる、粉体供給機と、
所定量の粉粒体が供給された前記粉体供給機の重量を計測し、前記計測された重量に応じた信号を出力する重量センサと、
前記粉体供給機の供給盤の回転回数を計数する計数センサと、
少なくとも、前記粉粒体の物理的特性に応じて設定された前記撹拌体の撹拌羽根の水平面に対する傾き角度、および、前記撹拌体と前記供給盤とが回転する同一の回転速度を条件として前記粉体供給機を動作させるとともに、
前記重量センサを介して計測された前記粉体供給機の重量値を所定の周期間隔で取得し、前記所定の周期間隔の前後で取得された2つの前記重量値の差分である差分重量値を求めるとともに、前記差分重量値と、前記供給盤の単位回転毎に前記粉体供給機の排出口から排出される前記粉粒体の単位体積値と、前記所定の周期間隔における前記回転回数とに基づいて、前記粉粒体の比容積を算出する制御部と、
を備える比容積計測システム。
[2]
前記制御部は、前記粉粒体の圧縮率が2パーセント以下において、前記撹拌羽根の水平面に対する傾き角度が45度から135度の範囲、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の前記排出口に到達できないロス量、粉体圧の少なくとも一つの補正量に基づいて補正を行い、前記比容積を算出する、[1]に記載の比容積計測システム。
[3]
前記制御部は、前記粉粒体の圧縮率が3パーセント以下において、前記撹拌羽根の水平面に対する傾き角度が45度以上かつ135度未満の範囲、かつ、前記回転速度が3rpmから9rpmの範囲を条件として前記粉体供給機を動作させる、[1]に記載の比容積計測システム。
[4]
前記制御部は、前記粉粒体の圧縮率が4.1パーセント未満において、前記撹拌羽根の水平面に対する傾き角度が45度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機
に供給された前記粉粒体の前記排出口に到達できないロス量、粉体圧の少なくとも一つの補正量に基づいて補正を行い、前記比容積を算出する、[1]に記載の比容積計測システム。
[5]
前記制御部は、前記撹拌羽根の水平面に対する傾き角度が45度超から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の前記排出口に到達できないロス量に基づいて補正を行い、前記比容積を算出する、[4]に記載の比容積計測システム。
[6]
前記制御部は、前記撹拌羽根の水平面に対する傾き角度が45度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させる、[4]に記載の比容積計測システム。
[7]
前記制御部は、前記粉粒体の圧縮率が4.3パーセント未満において、前記撹拌羽根の水平面に対する傾き角度が45度から135度の範囲、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させる、[1]に記載の比容積計測システム。
[8]
前記制御部は、前記粉粒体の圧縮率が9.8パーセントから17.2パーセントにおいて、前記撹拌羽根の水平面に対する傾き角度が90度から180度の範囲、かつ、前記回転速度が3rpmから12rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の粉体圧を補正して前記比容積を算出する、[1]に記載の比容積計測システム。
[9]
前記制御部は、前記粉粒体の圧縮率が24.3パーセントを超える場合において、前記撹拌羽根の水平面に対する傾き角度が45度超かつ135度未満、かつ、前記回転速度が3rpmから7rpmの範囲を条件として前記粉体供給機を動作させるとともに、前記粉体供給機に供給された前記粉粒体の粉体圧を補正して前記比容積を算出する、[1]に記載の比容積計測システム。
[10]
前記制御部は、前記粉体供給機に供給される粉粒体が上部貯留体に貯留される上限重量および下限重量を設定し、前記重量センサによって計測された前記粉体供給機の重量値が前記下限重量を下回ることを検知するとともに、前記上限重量を超えない供給量の粉粒体を前記上部貯留体に供給する、[1]に記載の比容積計測システム。
[11]
前記制御部は、所定量の粉粒体が前記上部貯留体に供給された一定期間経過後から、事前に設定された前記供給盤の所定の回転回数毎に前記重量センサを介して計測された前記粉体供給機の重量値を取得する、[1]に記載の比容積計測システム。
[12]
前記制御部は、前記断面領域を通過する粉粒体の一部が前記外周縁部上面と前記偏向板の下端との空隙から流出することにより前記排出口に到達できない前記粉粒体のロス量に基づき前記算出される比容積を補正する、[1]に記載の比容積計測システム。
[13]
前記制御部は、前記粉粒体の圧縮率が4以上の粉粒体に対して前記粉粒体の圧縮率に基づき前記算出される比容積を補正する、[1]に記載の比容積計測システム。
[14]
筒状の内面空間を有し、流入する粉粒体を一時的に貯留する貯留体と、
前記筒状の内面空間の中心軸周りに回転し、前記貯留体に一時的に貯留された粉粒体を中心軸周りに回転移動させことで、前記貯留体に一時的に貯留された粉粒体を排出口から
排出する排出機構と、を有する粉体供給機、および
前記粉粒体が一時的に貯留されている前記粉体供給機の重量値を計測する重量センサと、
前記の回転回数を計数する計数センサと、
所定の周期間隔で取得された前記重量値の差分である差分重量値と前記所定の周期間隔における回転回数とに基づいて、前記粉粒体の比容積を算出する制御部、
を備える比容積計測システム。
[15]
粉粒体を一時的に貯留する貯留体の筒状の内面空間の中心軸周りに回転し、前記貯留体の上方に接続された上部貯留体に一時的に貯留された粉粒体を中心軸周りに回転移動させることで前記粉粒体を排出口から排出する排出機構を有する粉体供給機を、前記粉粒体の物理的特性に応じて設定された撹拌体の撹拌羽根の水平面に対する傾き角度、および、前記撹拌体と前記排出機構の供給盤とが回転する同一の回転速度を条件として前記粉体供給機を動作させるとともに、前記粉体供給機の重量値を所定の周期間隔で取得し、前記所定の周期間隔で取得された前記重量値の差分である差分重量値と前記所定の周期間隔における回転回数とに基づいて、前記粉粒体の比容積を算出する、比容積算出方法。
【発明の効果】
【0007】
本発明によれば、粉粒体の比容積を処理の工程で自動的に計測可能な技術が提供できる。
【図面の簡単な説明】
【0008】
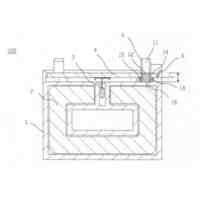
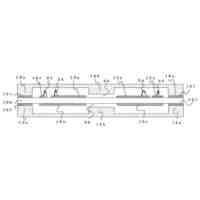
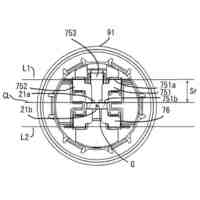
図1は、実施形態に係る粉体供給機の一実施例を示す概略断面側面図である。
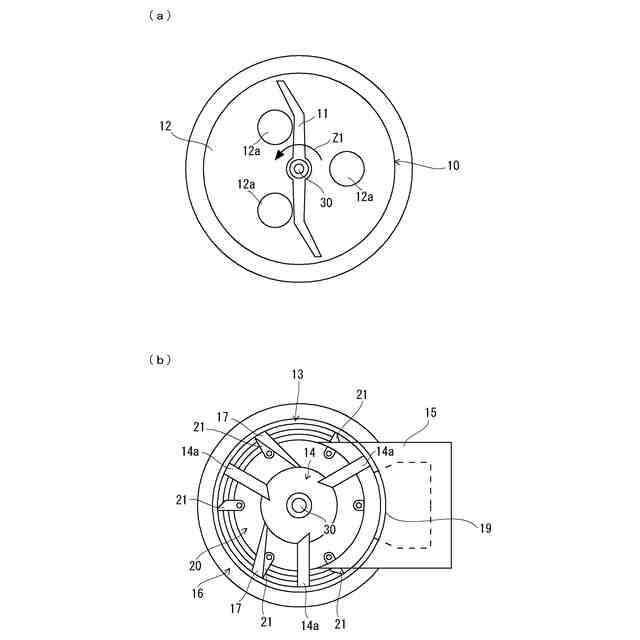
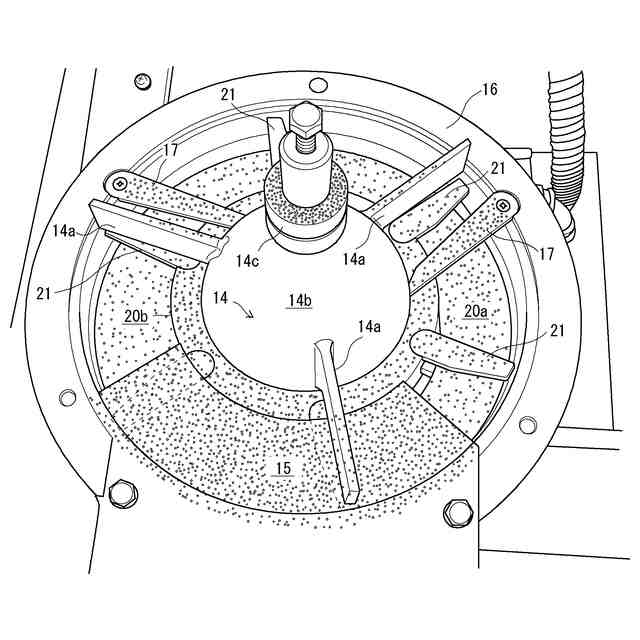
図2は、図1に示されるA-A線、B-B線の断面図である。
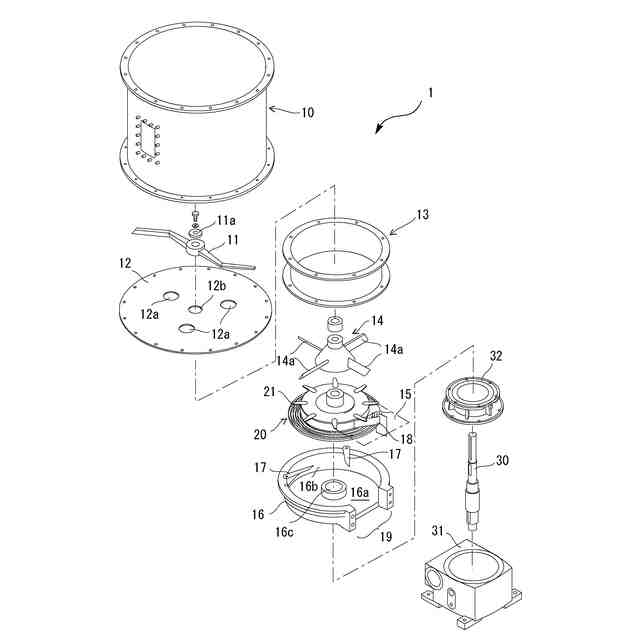
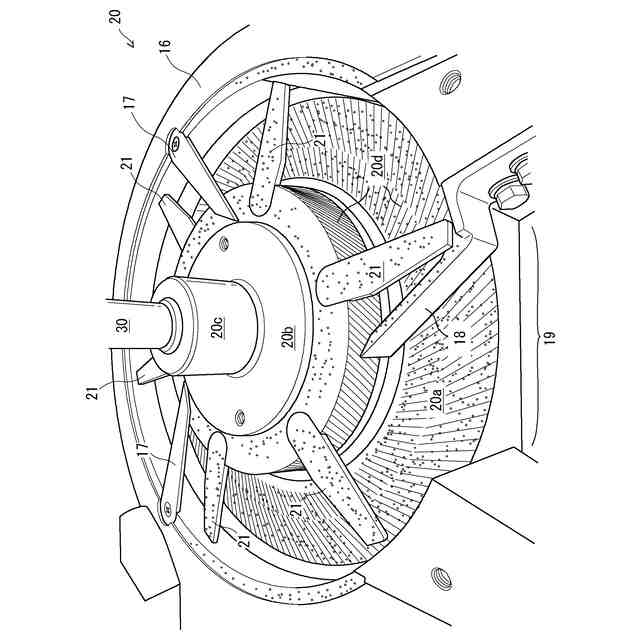
図3は、実施形態に係る粉体供給機の分解斜視図である。
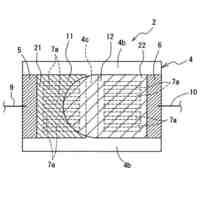
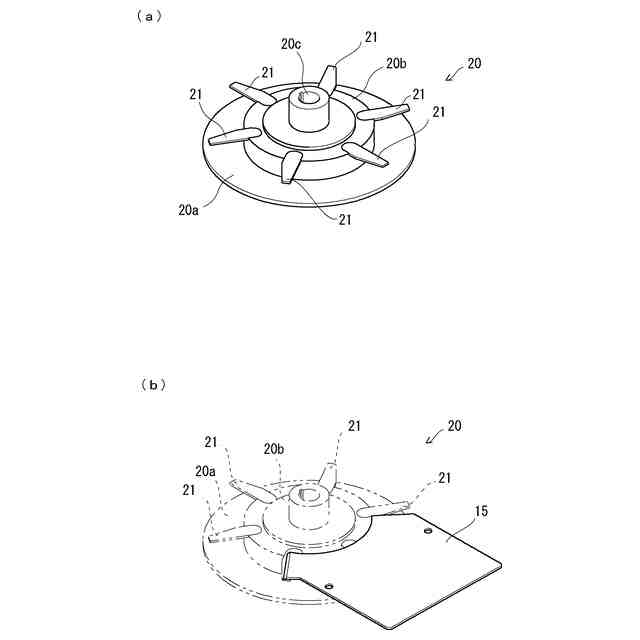
図4は、実施形態に係る供給盤の構造を説明する斜視図である。
図5は、実施形態に係る供給盤に形成される流路を説明する図である。
図6は、実施形態に係る受容体に設けられた偏向板を説明する図である。
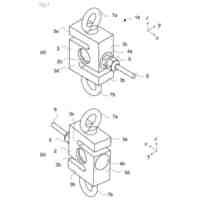
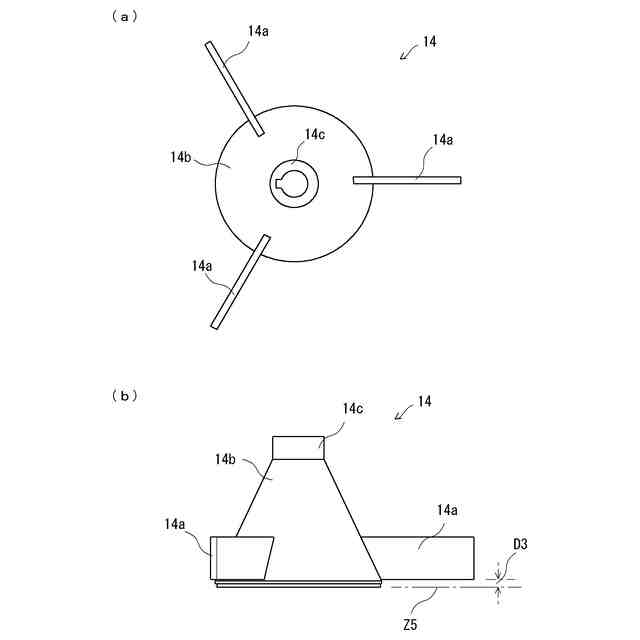
図7は、実施形態に係る撹拌体の構造を説明する図である。
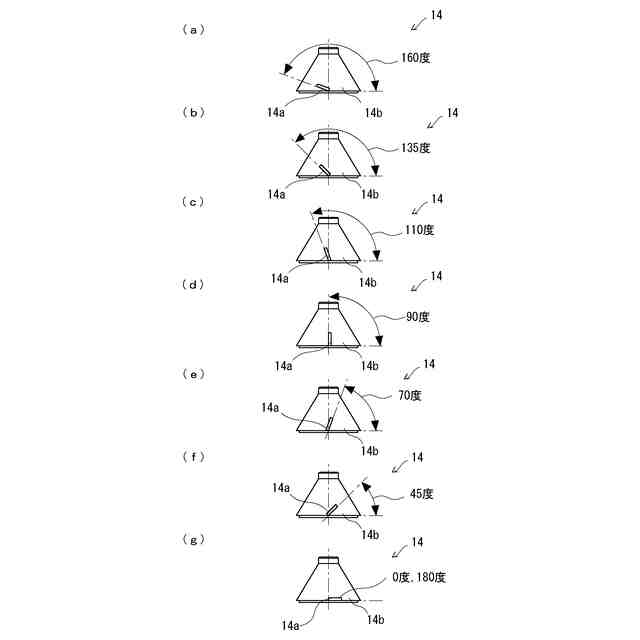
図8は、実施形態に係る撹拌羽根の水平面に対する相対角度を説明する側面図である。
図9は、実施形態に係る撹拌体による粉粒体の撹拌を説明する図である。
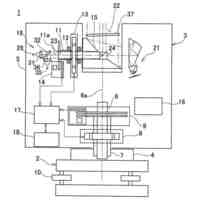
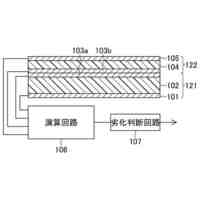
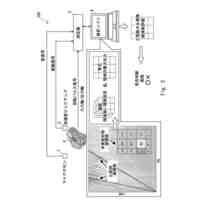
図10は、実施形態に係る比容積計測システムの構成の一例を示す図である。
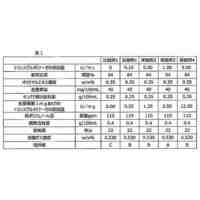
図11は、実施例1における計測結果を示す図である。
図12は、実施例2における計測結果を示す図である。
図13は、実施例3における計測結果を示す図である。
図14は、実施例4における計測結果を示す図である。
図15は、実施例5における計測結果を示す図である。
図16は、実施例6における計測結果を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、発明を実施するための一の形態(以下、一実施形態、実施形態
ともいう)に係る粉体供給機を説明する。以下の実施形態の構成は例示であり、本粉体供給機は実施形態の構成には限定されない。また、本実施形態に開示される構成部品の寸法、材質、形状、相対配置などは、特に記載がない限り発明の技術的範囲をそれらのみに限定する趣旨のものではない。
【0010】
(粉体供給機構成)
先ず、本実施形態に係る粉体供給機1について説明する。図1は、本実施形態に係る粉体供給機1の一実施例を示す概略断面側面図である。図2(a)と、(b)は、それぞれ、図1に示されるA-A線の断面図と、B-B線の断面図である。図3は、本実施形態に係る粉体供給機1の分解斜視図である。図1から図3に示されるように、粉体供給機1は、上流工程から供給された所定量の粉粒体を貯留する上部貯留体10と、上部貯留体10の下方側に接続される下部貯留体13と、下部貯留体13の底部として当該下部貯留体の下方側に接続される受容体16とを備える。受容体16の下方側には、楊台32を介し、回転駆動機構が収納された収納ケース31が接続される。回転駆動機構は、例えば、電動モータ等の駆動軸に連動結合され、上部貯留体10に延伸する回転軸部材である立軸30を所定の回転数(rpm)で回転駆動させる。上部貯留体10、下部貯留体13、受容体16のそれぞれの略中央部に立軸30が挿通され、同心的に構成されている。立軸30は、粉体供給機内で回転可能に構成されている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
味の素株式会社
樹脂組成物
15日前
味の素株式会社
樹脂組成物
1日前
味の素株式会社
化粧料組成物
9日前
味の素株式会社
感光性樹脂組成物セット
5日前
味の素株式会社
感光性樹脂組成物セット
5日前
味の素株式会社
感光性樹脂組成物セット
5日前
味の素株式会社
感光性樹脂組成物セット
5日前
味の素株式会社
比容積計測システムおよび比容積算出方法
1日前
味の素株式会社
樹脂組成物
8日前
味の素株式会社
抗体に対する親和性物質、切断性部分および反応性基を有する化合物またはその塩
8日前
サントリーホールディングス株式会社
炭酸飲料の製造方法、及び炭酸飲料の泡沫安定化方法。
1日前
甲神電機株式会社
電流センサ
22日前
甲神電機株式会社
漏電検出器
22日前
株式会社大真空
センサ
17日前
甲神電機株式会社
電流検出器
22日前
東レ株式会社
液体展開用シート
9日前
株式会社高橋型精
採尿具
23日前
ユニパルス株式会社
ロードセル
16日前
株式会社トプコン
測量装置
22日前
アズビル株式会社
湿度センサ
2日前
株式会社トプコン
植物センサ
5日前
株式会社東芝
センサ
1日前
株式会社ミツトヨ
変位測定装置
1日前
キヤノン電子株式会社
サーボ加速度計
9日前
株式会社小野測器
回転計測装置
1日前
キヤノン電子株式会社
サーボ加速度計
9日前
キヤノン電子株式会社
サーボ加速度計
9日前
株式会社クボタ
作業車両
8日前
日本特殊陶業株式会社
ガスセンサ
23日前
豊田合成株式会社
表示装置
22日前
トヨタ自動車株式会社
異音解析方法
1日前
トヨタ自動車株式会社
画像検査装置
17日前
トヨタ自動車株式会社
NVH解析装置
1日前
株式会社東京久栄
水中移動体用採水器
23日前
株式会社大真空
センサ及びその製造方法
16日前
キヤノン株式会社
撮像装置
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ