TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025023603
公報種別
公開特許公報(A)
公開日
2025-02-17
出願番号
2023127897
出願日
2023-08-04
発明の名称
方位誤差推定装置
出願人
株式会社SOKEN
,
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
G01S
7/40 20060101AFI20250207BHJP(測定;試験)
要約
【課題】レーダ装置の方位角度の誤差の推定精度を向上する技術を提供すること。
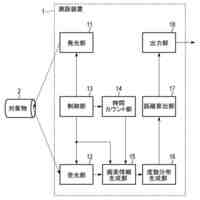
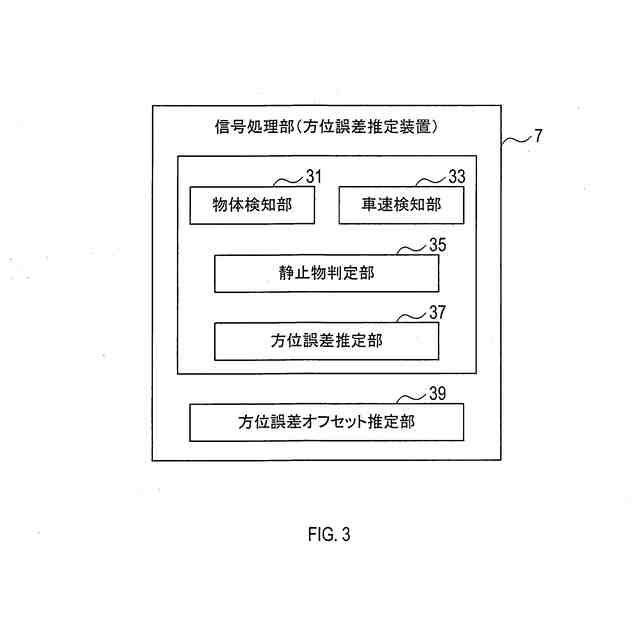
【解決手段】信号処理部7は、物体検知部31と車速検知部33と静止物判定部35と方位誤差推定部37とを備えるとともに、方位誤差オフセット推定部39を備える。方位誤差推定部37は、静止物に対する相対速度の方位角度の依存性を利用して、物体検知部31によって検知される物体の方位角度毎の角度誤差を推定する。方位誤差オフセット推定部39は、静止物の相対速度及び方位角度に基づいて、レーダ装置の軸ずれ角に対応する値を示す方位誤差オフセットを推定する。そして、静止物判定部35は、方位誤差オフセットに応じて、静止物の判定条件を変更し、方位誤差推定部37は、変更された静止物の判定条件に基づいて、方位角度毎の角度誤差を推定する。
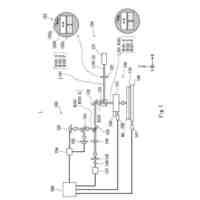
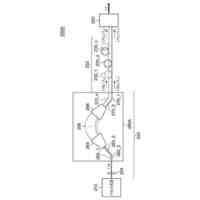
【選択図】図3
特許請求の範囲
【請求項1】
自車の周囲の物体を検知するレーダ装置(3)を用いる場合に、前記物体の方位角度の誤差を推定する方位誤差推定装置(7)であって、
前記自車の周囲の検知領域に存在する前記物体の情報のうち、少なくとも前記自車に対する相対速度及び前記方位角度を検知するように構成された物体検知部(31)と、
前記自車の速度を検知するように構成された車速検知部(33)と、
前記物体検知部及び前記車速検知部から得られた前記物体の前記相対速度及び前記方位角度と前記自車の速度とから、前記物体が静止物かどうかを判定するように構成された静止物判定部(35)と、
前記静止物に対する前記相対速度の前記方位角度の依存性を利用して、前記物体検知部によって検知される前記物体の前記方位角度毎の角度誤差を推定するように構成された方位誤差推定部(37)と、
を備え、
更に、前記静止物の前記相対速度及び前記方位角度に基づいて、前記レーダ装置の軸ずれ角に対応する値を示す方位誤差オフセットを推定するように構成された方位誤差オフセット推定部(39)と、
を備え、
前記静止物判定部は、前記方位誤差オフセットに応じて、前記静止物の判定条件を変更するように構成されるとともに、前記方位誤差推定部は、前記変更された前記静止物の判定条件に基づいて、前記方位角度毎の角度誤差を推定するように構成された、
方位誤差推定装置。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の方位誤差推定装置であって、
前記方位誤差オフセット推定部は、前記静止物の前記相対速度及び前記方位角度に基づいて、前記レーダ装置の軸ずれ角に対応する、前記静止物の前記相対速度と前記方位角度との関係を表す曲線のずれの状態を示す、前記方位誤差オフセットを推定するように構成された、
方位誤差推定装置。
【請求項3】
請求項1に記載の方位誤差推定装置であって、
前記方位誤差オフセット推定部は、全方位における前記静止物の前記相対速度の前記方位角度の依存性に基づいて、前記方位誤差オフセットを推定するように構成された、
方位誤差推定装置。
【請求項4】
請求項1に記載の方位誤差推定装置であって、
前記静止物の判定条件を変更する場合には、前記方位誤差オフセット推定部にて前記方位誤差オフセットの推定の際に用いる前記静止物を抽出する範囲よりも、前記方位誤差推定部にて前記角度誤差の推定の際に用いる前記静止物を抽出する範囲を狭くするように構成された、
方位誤差推定装置。
【請求項5】
請求項1に記載の方位誤差推定装置であって、
前記方位誤差推定部は、前記方位誤差オフセットの推定を複数サイクル実施した場合に、前記方位誤差オフセットが収束した後に、前記方位角度毎の角度誤差を出力するように構成された、
方位誤差推定装置。
【請求項6】
請求項5に記載の方位誤差推定装置であって、
前記複数サイクルにおける前記方位誤差オフセットの推定値のばらつきに応じて、前記方位誤差オフセットの収束を判定するように構成された、
方位誤差推定装置。
【請求項7】
請求項1に記載の方位誤差推定装置であって、
前記方位誤差推定部にて、前記方位誤差オフセットの推定を複数サイクル実施した場合に、前記複数サイクルにおける前記方位誤差オフセットの推定値のばらつきに応じて、前記静止物の判定条件を変更するように構成された、
方位誤差推定装置。
【請求項8】
請求項7に記載の方位誤差推定装置であって、
前記静止物判定部は、前記方位誤差オフセットの前記複数サイクルの推定値のばらつきが小さいほど、前記静止物の抽出範囲を狭めるように構成された、
方位誤差推定装置。
【請求項9】
自車の周囲の物体を検知するレーダ装置(3)を用いる場合に、前記物体の方位角度の誤差を推定する方位誤差推定装置(7)であって、
前記自車の周囲の検知領域に存在する前記物体の情報のうち、前記自車に対する少なくとも相対速度及び方位角度を検知するように構成された物体検知部(31)と、
前記自車の速度を検知するように構成された車速検知部(33)と、
前記物体検知部及び前記車速検知部から得られた前記物体の前記相対速度及び前記方位角度と前記自車の速度とから、前記物体が静止物かどうかを判定するように構成された静止物判定部(35)と、
前記静止物に対する前記相対速度の前記方位角度の依存性を利用して、前記物体検知部によって検知される前記物体の前記方位角度毎の角度誤差を推定するように構成された方位誤差推定部(37)と、
を備えるとともに、
前記静止物判定部は、前記方位誤差推定部によって推定された前記方位角度毎の角度誤差に基づいて、前記静止物の判定条件を前記方位角度毎に変更するように構成された、
方位誤差推定装置。
【請求項10】
請求項9に記載の方位誤差推定装置であって、
前記方位誤差推定部が、前記方位角度毎の角度誤差を複数サイクル実施した場合に、
前記静止物判定部は、前記方位角度毎の角度誤差の推定値の前記複数サイクル間のばらつきが小さいほど、前記方位角度毎の前記静止物の抽出範囲を狭めるように構成された、
方位誤差推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、レーダ装置に関する方位誤差を推定することができる技術に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、電磁波を送受信することによって車両周囲に存在する障害物を検出するレーダ装置のアンテナ等を、バンパ内に設置することが行われている。
また、近年では、静止物の相対速度の方位角度の依存性を利用して、バンパによる方位毎の角度誤差(即ち、バンパ誤差)を推定する技術が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6358076号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、発明者の詳細な検討の結果、従来の技術について、下記のような課題が見出された。
レーダ装置では、レーダビームの中心軸がずれるいわゆる軸ずれが生じることがあり、軸ずれがある場合に上述したバンパ誤差の推定を行うと、バンパ誤差の推定の精度が低下する恐れがある。
【0005】
つまり、軸ずれが生じている場合には、物体(即ち、静止物等)の位置等を精度良く検出できないことがあるので、誤った静止物の位置等の情報を用いてバンパ誤差を推定すると、結果としてバンパ誤差(即ち、方位角度の誤差)の推定精度が低下するという問題がある。
【0006】
本開示の一局面は、レーダ装置の方位角度の誤差の推定精度を向上することが可能な技術を提供することを目的としている。
【課題を解決するための手段】
【0007】
a)本開示の一態様は、自車の周囲の物体を検知するレーダ装置(3)を用いる場合に、物体の方位角度の誤差を推定する方位誤差推定装置(7)に関するものである。
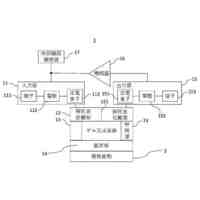
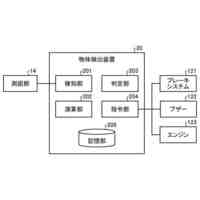
この方位誤差推定装置は、物体検知部(31)と車速検知部(33)と静止物判定部(35)と方位誤差推定部(37)とを備えるとともに、方位誤差オフセット推定部(39)を備える。
【0008】
物体検知部は、自車の周囲の検知領域に存在する物体の情報のうち、少なくとも自車に対する相対速度及び方位角度を検知するように構成されている。
車速検知部は、自車の速度を検知するように構成されている。
【0009】
静止物判定部は、物体検知部及び車速検知部から得られた物体の相対速度及び方位角度と自車の速度とから、物体が静止物かどうかを判定するように構成されている。
方位誤差推定部(37)は、静止物に対する相対速度の方位角度の依存性を利用して、物体検知部によって検知される物体の方位角度毎の角度誤差を推定するように構成されている。
【0010】
方位誤差オフセット推定部は、静止物の相対速度及び方位角度に基づいて、レーダ装置の軸ずれ角に対応する値を示す方位誤差オフセットを推定するように構成されている。
そして、静止物判定部は、方位誤差オフセットに応じて、静止物の判定条件を変更するように構成されるとともに、方位誤差推定部は、変更された静止物の判定条件に基づいて、方位角度毎の角度誤差を推定するように構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
液体展開用シート
7日前
アズビル株式会社
湿度センサ
今日
株式会社トプコン
植物センサ
3日前
キヤノン電子株式会社
サーボ加速度計
7日前
キヤノン電子株式会社
サーボ加速度計
7日前
キヤノン電子株式会社
サーボ加速度計
7日前
株式会社クボタ
作業車両
6日前
三菱電機株式会社
振動センサ
3日前
株式会社トーキン
電流センサ
6日前
矢崎総業株式会社
サーミスタ
7日前
株式会社ミツトヨ
画像測定機及びプログラム
6日前
三菱電機株式会社
信号処理器及びレーダ装置
6日前
オムロン株式会社
プローブピン
3日前
株式会社デンソー
電圧検出回路
6日前
国立大学法人東京科学大学
サンプル測定装置
今日
株式会社デンソー
電圧検出回路
6日前
キヤノン株式会社
測距装置
今日
株式会社JVCケンウッド
ナビゲーション装置
13日前
レーザーテック株式会社
検査方法及び検査装置
6日前
株式会社シノテスト
クレアチニン含有物質の安定化方法
3日前
TPR株式会社
スタイラス
3日前
三菱電機株式会社
推定装置
6日前
新東工業株式会社
センサモジュール
7日前
株式会社エー・アンド・デイ
ウェイトチェッカー
6日前
四日市電機株式会社
光学式コロナ放電検出システム
6日前
川崎車両株式会社
気密確認装置
6日前
ウシオ電機株式会社
光源装置および光測定装置
6日前
日機装株式会社
光測定方法
7日前
株式会社サーマルプラント
熱電対遮蔽板
6日前
株式会社大林組
ターゲット設置方法、ターゲット
3日前
トヨタ自動車株式会社
情報処理装置
6日前
株式会社アイシン
物体検出装置
6日前
オークマ株式会社
軸受異常の原因推定方法及び装置
3日前
太陽誘電株式会社
情報処理装置
6日前
株式会社明電舎
車両のタイヤ拘束装置
7日前
東京エレクトロン株式会社
検査システム
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ