TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025021908
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126011
出願日
2023-08-02
発明の名称
回転機械および回転機械における回転子の回転軸方向変位の検出方法
出願人
株式会社荏原製作所
,
学校法人東京電機大学
代理人
個人
,
個人
,
個人
,
個人
主分類
G01D
5/12 20060101AFI20250206BHJP(測定;試験)
要約
【課題】ホールセンサのみを用いて、回転子の回転角度だけでなく回転子の回転軸方向への変位も検出する。
【解決手段】複数の磁極を有する回転子と、複数の固定子コイルを有するモータ固定子と、前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数のホールセンサと、前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転軸方向変位に比例した電圧を算出し、前記算出した電圧に基づいて前記回転子の回転軸方向変位を決定するように構成されたコントローラと、を備える回転機械が提供される。
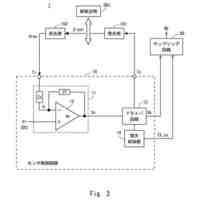
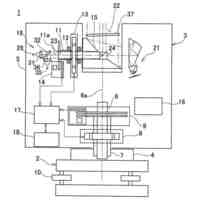
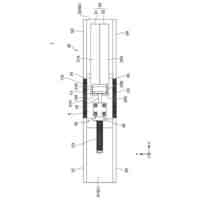
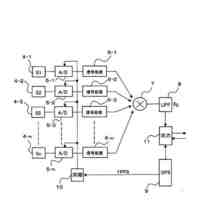
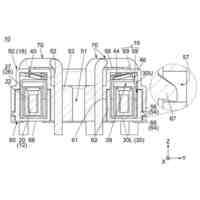
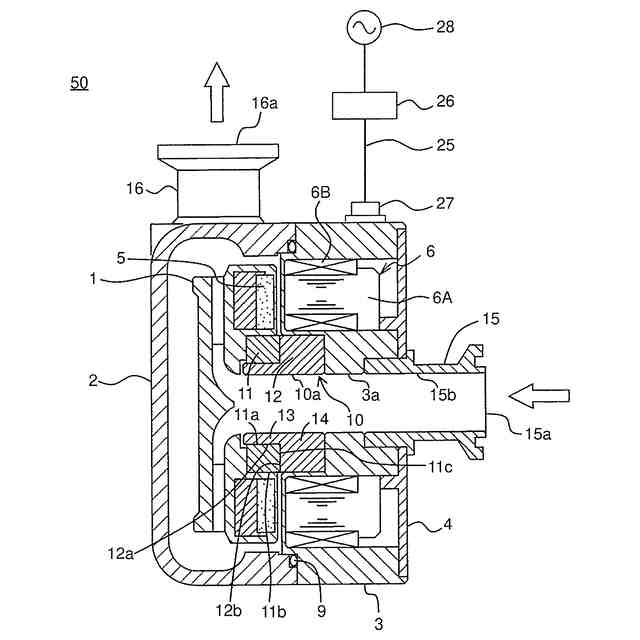
【選択図】図3
特許請求の範囲
【請求項1】
複数の磁極を有する回転子と、
複数の固定子コイルを有するモータ固定子と、
前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数のホールセンサと、
前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転軸方向変位に比例した電圧を算出し、前記算出した電圧に基づいて前記回転子の回転軸方向変位を決定するように構成されたコントローラと、
を備える回転機械。
続きを表示(約 1,100 文字)
【請求項2】
前記コントローラは、前記回転子の回転軸方向変位に比例した前記電圧を、前記複数のホールセンサからの前記電圧信号の二乗和の平方根として算出するように構成される、請求項1に記載の回転機械。
【請求項3】
前記複数のホールセンサは、対向配置された複数のホールセンサ対を備え、
前記コントローラは、前記ホールセンサ対からの電圧信号を平均化するように構成される、
請求項1または2に記載の回転機械。
【請求項4】
前記コントローラは、異なるホールセンサからの電圧信号の振幅を揃えるための補正を行うように構成される、請求項1または2に記載の回転機械。
【請求項5】
前記コントローラは、異なるホールセンサからの電圧信号の位相差を揃えるための補正を行うように構成される、請求項1または2に記載の回転機械。
【請求項6】
前記複数のホールセンサからの電圧信号は三相の信号であり、
前記コントローラは、前記三相の信号を二相の信号に変換するように構成される、
請求項1または2に記載の回転機械。
【請求項7】
前記複数のホールセンサは、対向配置された複数のホールセンサ対を備え、
前記複数のホールセンサからの電圧信号は三相の信号であり、
前記コントローラは、
前記ホールセンサ対からの電圧信号を平均化し、
異なるホールセンサ対からの前記平均化された電圧信号の振幅および位相差を揃えるための補正を行い、
前記平均化および補正された三相の信号を二相の信号に変換し、
前記二相の信号の二乗和の平方根を算出し、
前記二相の信号の二乗和の平方根に所定の比例係数を乗じさらに所定の定数を加算することによって、前記回転子の回転軸方向変位を決定する、
ように構成される、請求項1に記載の回転機械。
【請求項8】
前記コントローラは、前記二相の信号に基づいて前記回転子の前記回転角度を算出するように構成される、請求項7に記載の回転機械。
【請求項9】
回転機械における回転子の回転軸方向変位の検出方法であって、
前記回転機械は、
複数の磁極を有する回転子と、
複数の固定子コイルを有するモータ固定子と、
前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数のホールセンサと、を備え、
前記検出方法は、
前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転軸方向変位に比例した電圧を算出するステップと、
前記算出した電圧に基づいて前記回転子の回転軸方向変位を決定するステップと、
を含む、検出方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、回転機械および回転機械における回転子の回転軸方向変位の検出方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ブラシレスモータ等の回転機械において、モータの回転制御を行うために、回転子の回転角度および回転子の回転軸方向への変位を検出することが重要である。従来、回転子の回転角度の検出にはホールセンサが用いられ(例えば特許文献1参照)、回転子の回転軸方向への変位の検出には渦電流センサが用いられていた。また、回転子の回転軸方向への変位を検出する方法として、磁気回路に流れる電流の変化から変位量を求める方法が知られている(例えば特許文献2参照)。
【先行技術文献】
【特許文献】
【0003】
特開2014-207779号公報
特開2019-152593号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転子の回転軸方向への変位の検出に関し、渦電流センサは高価であるという問題がある。また、渦電流センサや特許文献2の磁気回路は、それらを設置するためのスペースが必要となり、装置の設計レイアウトの自由度が制限されるという欠点もある。そこで、ホールセンサのみを用いて、回転子の回転角度だけでなく回転子の回転軸方向への変位も検出することが望まれる。
【課題を解決するための手段】
【0005】
[形態1]形態1によれば、複数の磁極を有する回転子と、複数の固定子コイルを有するモータ固定子と、前記モータ固定子上に設けられ、前記回転子からの磁界に応じた電圧信号を出力する複数のホールセンサと、前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転角度を決定するように構成され、さらに、前記複数のホールセンサからの電圧信号に基づいて前記回転子の回転軸方向変位に比例した電圧を算出し、前記算出した電圧に基づいて前記回転子の回転軸方向変位を決定するように構成されたコントローラと、を備える回転機械が提供される。
【0006】
[形態2]形態2によれば、形態1の回転機械において、前記コントローラは、前記回転子の回転軸方向変位に比例した前記電圧を、前記複数のホールセンサからの前記電圧信号の二乗和の平方根として算出するように構成される。
【0007】
[形態3]形態3によれば、形態1または2の回転機械において、前記複数のホールセンサは、対向配置された複数のホールセンサ対を備え、前記コントローラは、前記ホールセンサ対からの電圧信号を平均化するように構成される。
【0008】
[形態4]形態4によれば、形態1または2の回転機械において、前記コントローラは、異なるホールセンサからの電圧信号の振幅を揃えるための補正を行うように構成される。
【0009】
[形態5]形態5によれば、形態1または2の回転機械において、前記コントローラは
、異なるホールセンサからの電圧信号の位相差を揃えるための補正を行うように構成される。
【0010】
[形態6]形態6によれば、形態1または2の回転機械において、前記複数のホールセンサからの電圧信号は三相の信号であり、前記コントローラは、前記三相の信号を二相の信号に変換するように構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社荏原製作所
研磨装置
3日前
株式会社荏原製作所
研磨装置
6日前
株式会社荏原製作所
回転機械および回転機械における回転子の回転軸方向変位の検出方法
6日前
個人
集束超音波の測定機
27日前
個人
センサ制御回路
27日前
甲神電機株式会社
電流検出器
20日前
甲神電機株式会社
漏電検出器
20日前
株式会社大真空
センサ
15日前
甲神電機株式会社
電流センサ
20日前
ユニパルス株式会社
ロードセル
14日前
東レ株式会社
液体展開用シート
7日前
株式会社高橋型精
採尿具
21日前
株式会社トプコン
測量装置
20日前
ダイトロン株式会社
外観検査装置
27日前
株式会社トプコン
植物センサ
3日前
アズビル株式会社
熱式流量計
21日前
アズビル株式会社
湿度センサ
今日
株式会社クボタ
作業車両
6日前
キヤノン電子株式会社
サーボ加速度計
7日前
キヤノン電子株式会社
サーボ加速度計
7日前
キヤノン電子株式会社
サーボ加速度計
7日前
日本特殊陶業株式会社
ガスセンサ
21日前
シャープ株式会社
収納装置
21日前
TDK株式会社
磁気センサ
27日前
豊田合成株式会社
表示装置
20日前
株式会社ミトミ技研
圧力測定装置
27日前
トヨタ自動車株式会社
画像検査装置
15日前
株式会社東京久栄
水中移動体用採水器
21日前
株式会社島津製作所
ガスクロマトグラフ
27日前
横河電機株式会社
光源装置
21日前
株式会社大真空
センサ及びその製造方法
14日前
TDK株式会社
温度センサ
21日前
ローム株式会社
MEMSデバイス
21日前
タカハタプレシジョン株式会社
水道メータ
27日前
ローム株式会社
MEMS装置
27日前
株式会社トーキン
電流センサ
6日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ