TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025016605
公報種別
公開特許公報(A)
公開日
2025-02-04
出願番号
2024189516,2024020215
出願日
2024-10-29,2021-09-02
発明の名称
LIDAR位相ノイズ除去システム
出願人
オーロラ・オペレイションズ・インコーポレイティッド
,
AURORA OPERATIONS, INC.
代理人
個人
,
個人
,
個人
主分類
G01S
7/481 20060101AFI20250128BHJP(測定;試験)
要約
【課題】FMCW-LIDARの信号の精度を高める。
【解決手段】光検出および距離測定(LIDAR)システムは、LIDAR測定ユニット、基準測定ユニット、および位相除去ユニットを含む。LIDAR測定ユニットは、レーザビームが移動する時間を推定する。基準測定ユニットは、レーザソースの位相を決定する。位相除去ユニットは、レーザソースの位相とレーザビームが移動する時間に少なくとも部分的に基づいて位相ノイズを識別し、レーザビームから位相ノイズを除去する。ノイズが除去された信号は、レーザソースとターゲットとの間の距離を決定するために使用される。
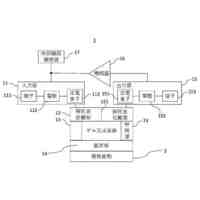
【選択図】図3a
特許請求の範囲
【請求項1】
レーザビームがレーザソースとターゲットとの間を移動する時間を推定するLIDAR測定ユニットと、
前記レーザソースの位相を決定するように構成される基準測定ユニットと、
前記レーザソースの位相および前記レーザビームが移動する時間に少なくとも部分的に基づいて、前記レーザビームを表す信号から位相ノイズを除去するように構成される位相除去ユニットと、を含む
LIDARシステム。
続きを表示(約 1,300 文字)
【請求項2】
自由空間干渉計と、
固定長干渉計と、をさらに含み、
前記レーザビームを表す信号は、前記自由空間干渉計から受信された第1ビート信号であり、
前記レーザソースの位相は、前記固定長干渉計から受信された第2ビート信号から計算され、
前記レーザソースは、前記自由空間干渉計と前記固定長干渉計に同時にレーザビームを供給する
請求項1に記載のLIDARシステム。
【請求項3】
前記自由空間干渉計は、第1局部発振器信号およびターゲット反射信号を結合して前記第1ビート信号を生成し、
前記固定長干渉計は、第2局部発振器信号および固定長光遅延線によって遅延した固定長信号を結合して前記第2ビート信号を生成する
請求項2に記載のLIDARシステム。
【請求項4】
前記位相除去ユニットは、前記LIDAR測定ユニットで推定された前記レーザビームの移動時間だけ前記レーザソースの位相を遅延させるように構成される遅延演算を通じて前記レーザソースの遅延位相を生成する
請求項1に記載のLIDARシステム。
【請求項5】
前記位相除去ユニットは、前記レーザソースの位相から前記レーザソースの遅延した位相を減算して前記レーザソースのデルタ位相を生成し、
前記レーザソースの前記デルタ位相は、前記レーザビームを表す信号内の位相ノイズを表す
請求項4に記載のLIDARシステム。
【請求項6】
前記位相除去ユニットは、前記レーザビームを表す信号に前記デルタ位相の複素共役(Complex Conjugate)を乗じて位相ノイズを除去する
請求項5に記載のLIDARシステム。
【請求項7】
前記位相ノイズが除去された前記レーザビームを表す信号であるデノイズされた信号(Denoised Signal)から前記レーザソースと前記ターゲットとの間の距離を計算するように構成される距離計算ユニットをさらに含む
請求項1に記載のLIDARシステム。
【請求項8】
前記距離計算ユニットは、前記デノイズされた信号の周波数を決定し、
前記デノイズされた信号の前記周波数は、前記デノイズされた信号の周波数表現のピーク振幅に基づいて決定される
請求項7に記載のLIDARシステム。
【請求項9】
前記LIDARシステムは、FMCW(Frequency Modulated Continuous Wave)LIDARシステムである
請求項1に記載のLIDARシステム。
【請求項10】
前記基準測定ユニットは、固定長干渉計からの同相信号(In-phase Signal)および直交信号(Quadrature Signal)に少なくとも部分的に基づいて前記レーザソースの位相を決定する
請求項1に記載のLIDARシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願についての相互参照
本出願は、2020年9月4日付で出願された米国仮出願第63/074,832号についての優先権を主張する2021年8月31日付で出願された米国特許出願第17/463,263号についての優先権を主張する。出願第17/463,263号および第63/074,832号は、参照として本明細書に含まれる。
続きを表示(約 1,400 文字)
【0002】
本開示は、一般に光検出および距離測定(LIDAR)に関する。
【背景技術】
【0003】
周波数変調連続波(FMCW、Frequency Modulated Continuous Wave)LIDARは、周波数変調されたコリメートされた光ビームをターゲットに向けてオブジェクトの距離と速度を直接測定する。ターゲットの距離および速度情報は、FMCW LIDAR信号から導出できる。LIDAR信号の精度を高める設計および技術が好ましい。
【0004】
自動車産業は、現在、特定の状況で車両を制御するための自律機能を開発している。SAE International標準J3016によると、レベル0(自律なし)からレベル5(あらゆる条件で運転者入力なしで操作できる車両)まで、6段階の自律性が存在する。自律機能を有する車両は、センサーを用いて車両が移動する環境を感知する。センサーからデータを収集して処理することによって、車両は周囲の環境を探索することができる。自律車両は、環境を感知するための1つ以上のFMCW LIDAR装置を含み得る。
【発明の概要】
【0005】
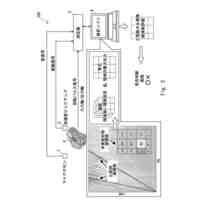
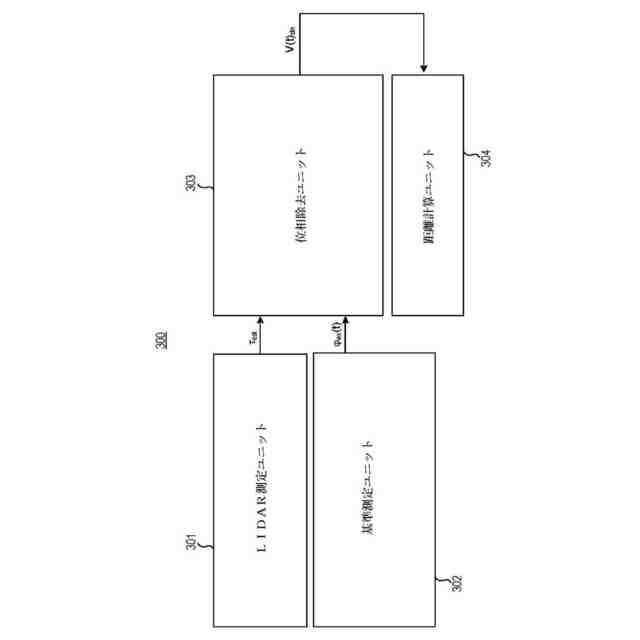
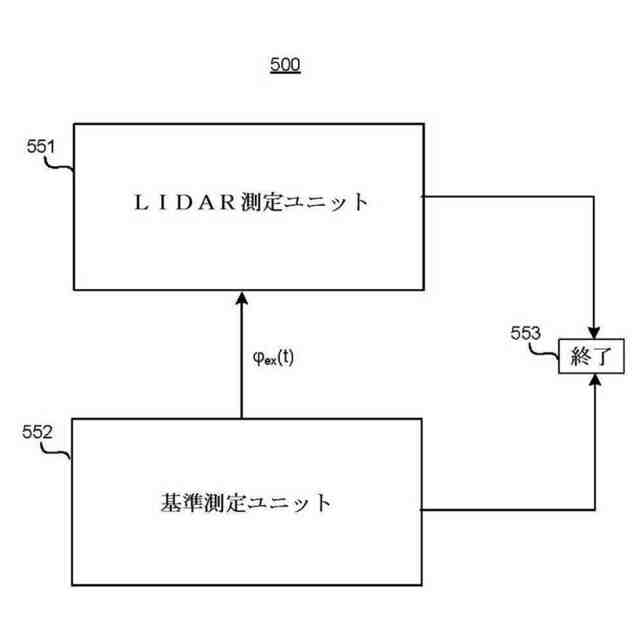
本開示の実施形態は、LIDAR測定ユニット、基準測定ユニット、および位相除去ユニットを含むLIDAR(Light Detection and Ranging)システムを含む。LIDAR測定ユニットは、レーザビームがレーザソースとターゲットとの間を移動する時間を推定するように構成される。基準測定ユニットは、レーザソースの位相を決定するように構成される。位相除去ユニットは、レーザソースの位相およびレーザビームが移動する時間に少なくとも部分的に基づいてレーザビームを表す信号から位相ノイズを除去するように構成される。
【0006】
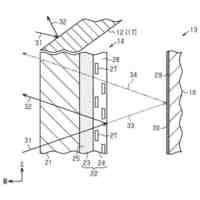
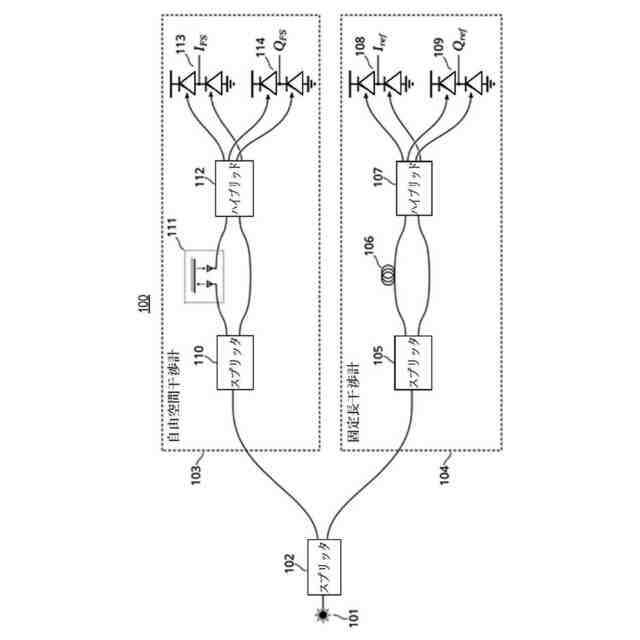
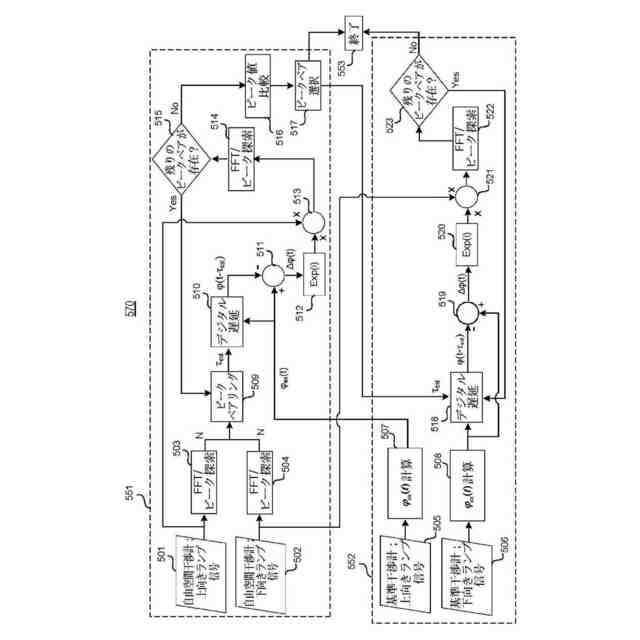
一実施形態において、LIDARシステムは、自由空間干渉計および固定長干渉計をさらに含む。レーザビームを表す信号は、自由空間干渉計から受信された第1ビート信号である。レーザソースの位相は、固定長干渉計から受信された第2ビート信号から計算される。レーザソースは、自由空間干渉計と固定長干渉計にレーザビームを同時に供給する。
【0007】
一実施形態において、自由空間干渉計は、第1局部発振器信号をターゲット反射信号と結合して第1ビート信号を生成し、固定長干渉計は、第2局部発振器信号を固定長光遅延線によって遅延した固定長信号と結合して第2ビート信号を生成する。
【0008】
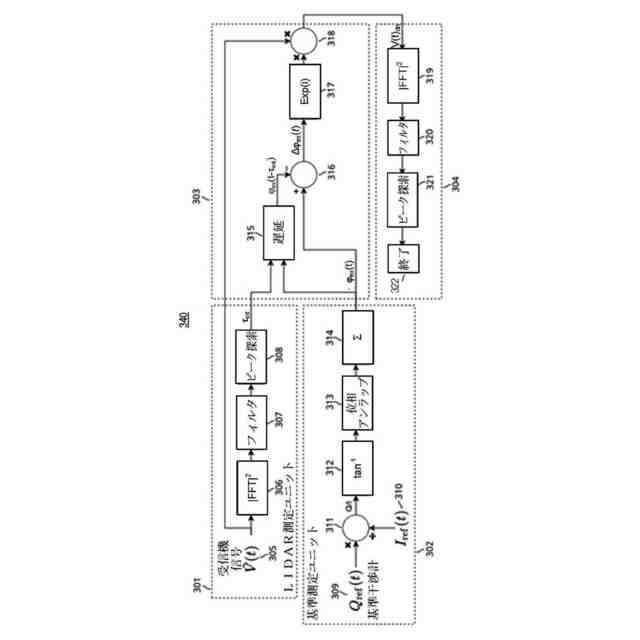
一実施形態において、位相除去ユニットは、LIDAR測定ユニットで推定されたレーザビームの移動時間だけレーザソースの位相を遅延させるように構成される遅延演算を通じてレーザソースの遅延位相を生成する。
【0009】
一実施形態において、位相除去ユニットは、レーザソースの位相からレーザソースの遅延した位相を減算してレーザソースのデルタ位相を生成し、レーザソースのデルタ位相は、レーザビームを表す信号内の位相ノイズを表す。
【0010】
一実施形態において、位相除去ユニットは、レーザビームを表す信号にデルタ位相の複素共役を乗じて位相ノイズを除去する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流検出器
24日前
甲神電機株式会社
電流センサ
24日前
株式会社大真空
センサ
19日前
甲神電機株式会社
漏電検出器
24日前
株式会社高橋型精
採尿具
25日前
ユニパルス株式会社
ロードセル
18日前
東レ株式会社
液体展開用シート
11日前
株式会社トプコン
測量装置
24日前
株式会社トプコン
植物センサ
7日前
アズビル株式会社
湿度センサ
4日前
アズビル株式会社
熱式流量計
25日前
株式会社東芝
センサ
3日前
キヤノン電子株式会社
サーボ加速度計
11日前
キヤノン電子株式会社
サーボ加速度計
11日前
キヤノン電子株式会社
サーボ加速度計
11日前
株式会社クボタ
作業車両
10日前
株式会社ミツトヨ
変位測定装置
3日前
株式会社小野測器
回転計測装置
3日前
日本特殊陶業株式会社
ガスセンサ
25日前
豊田合成株式会社
表示装置
24日前
シャープ株式会社
収納装置
25日前
トヨタ自動車株式会社
異音解析方法
3日前
トヨタ自動車株式会社
画像検査装置
19日前
株式会社東京久栄
水中移動体用採水器
25日前
トヨタ自動車株式会社
NVH解析装置
3日前
キヤノン株式会社
撮像装置
3日前
TDK株式会社
温度センサ
25日前
横河電機株式会社
光源装置
25日前
株式会社大真空
センサ及びその製造方法
18日前
ローム株式会社
MEMSデバイス
25日前
三菱電機株式会社
振動センサ
7日前
株式会社トーキン
電流センサ
10日前
矢崎総業株式会社
サーミスタ
11日前
公立大学法人大阪
蛍光X線分析装置
19日前
株式会社テクノメデイカ
採血分注システム
24日前
タカハタプレシジョン株式会社
水道メータ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ