TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025013581
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2024195250,2023511041
出願日
2024-11-07,2022-03-23
発明の名称
移動体の制御装置、移動体の制御方法、および記憶媒体
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
主分類
G08G
1/16 20060101AFI20250117BHJP(信号)
要約
【課題】車道と、車道と異なる所定領域と双方において適切な制御を行うこと。
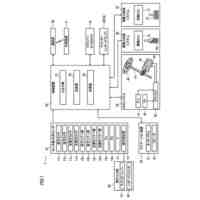
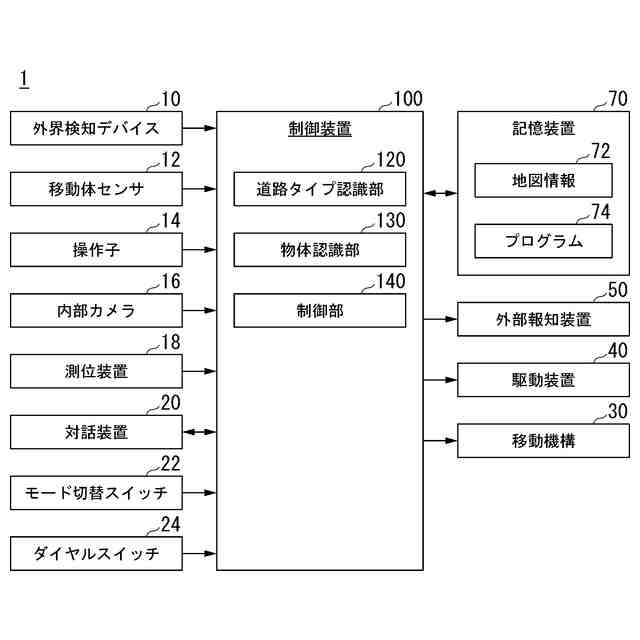
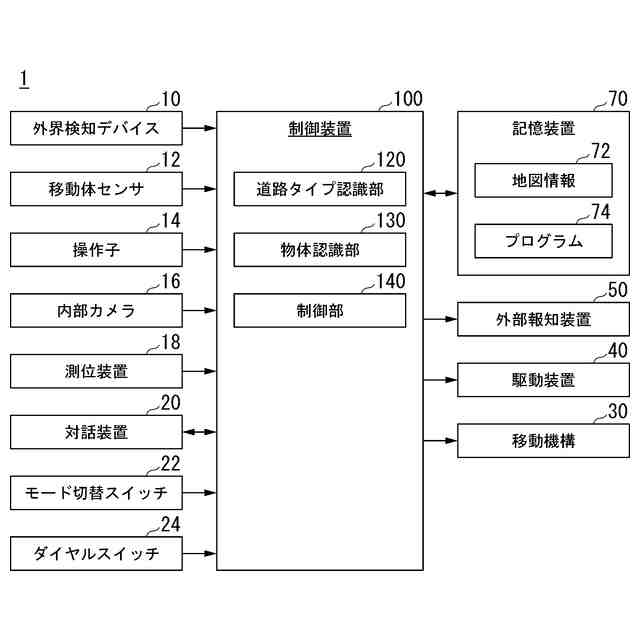
【解決手段】車道と、車道と異なる所定領域との双方を移動可能な移動体の制御装置であって、前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識する道路タイプ認識部と、前記移動体の速度を少なくとも部分的に制御する制御部であって、前記移動体が車道を移動する場合の速度を第1速度以下に制限し、前記移動体が前記所定領域を移動する場合の速度を前記第1速度よりも低い第2速度以下に制限する制御部と、を備え、前記制御部は、前記移動体が前記所定領域を移動していると認識された場合、前記移動体の周辺における物体との関係に基づいて前記第2速度よりも低い第1目標速度を決定し、決定された前記第1目標速度に対するユーザの速度指示に基づく補正を行うことで、第2目標速度を決定する、移動体の制御装置。
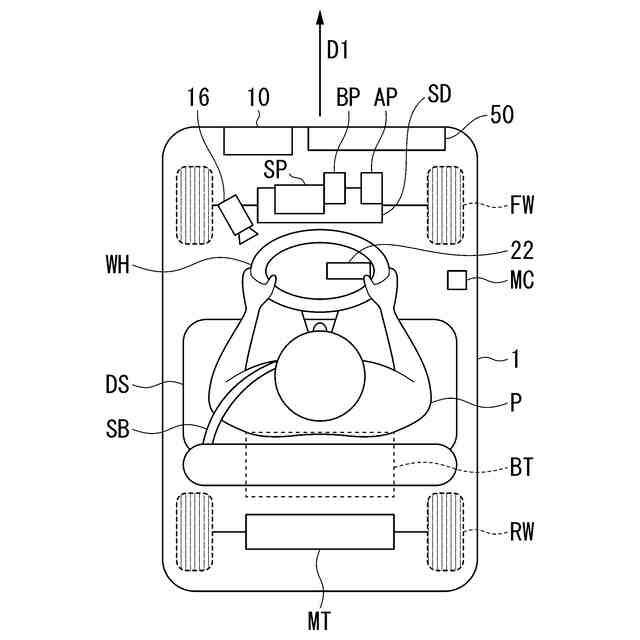
【選択図】図1
特許請求の範囲
【請求項1】
車道と、車道と異なる所定領域との双方を移動可能な移動体の制御装置であって、
前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識する道路タイプ認識部と、
前記移動体の速度を少なくとも部分的に制御する制御部であって、前記移動体が車道を移動する場合の速度を第1速度以下に制限し、前記移動体が前記所定領域を移動する場合の速度を前記第1速度よりも低い第2速度以下に制限する制御部と、
を備え、
前記制御部は、前記移動体が前記所定領域を移動していると認識された場合、
前記移動体の周辺における物体との関係に基づいて前記第2速度よりも低い第1目標速度を決定し、
決定された前記第1目標速度に対するユーザの速度指示に基づく補正を行うことで、第2目標速度を決定する、
移動体の制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記道路タイプ認識部は、前記移動体が前記所定領域を移動していることを認識した場合、外部報知装置に、前記所定領域を移動中であることを前記移動体の外部に報知させる、
請求項1記載の制御装置。
【請求項3】
前記道路タイプ認識部は、前記移動体の外部の状況を検知する外界検知デバイスの出力に基づいて、前記移動体が前記所定領域を移動しているか否かを認識する、
請求項1または2記載の制御装置。
【請求項4】
前記道路タイプ認識部は、スイッチに対するユーザの操作に基づいて、前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識する、
請求項1から3のうちいずれか1項記載の制御装置。
【請求項5】
前記制御部は、少なくとも前記移動体が前記所定領域を移動する場合の速度を前記速度指示を参照して自動的に制御し、前記速度指示に関わらず、前記移動体が前記所定領域を移動する場合の速度を前記第2速度以下に制限する、
請求項1から4のうちいずれか1項記載の制御装置。
【請求項6】
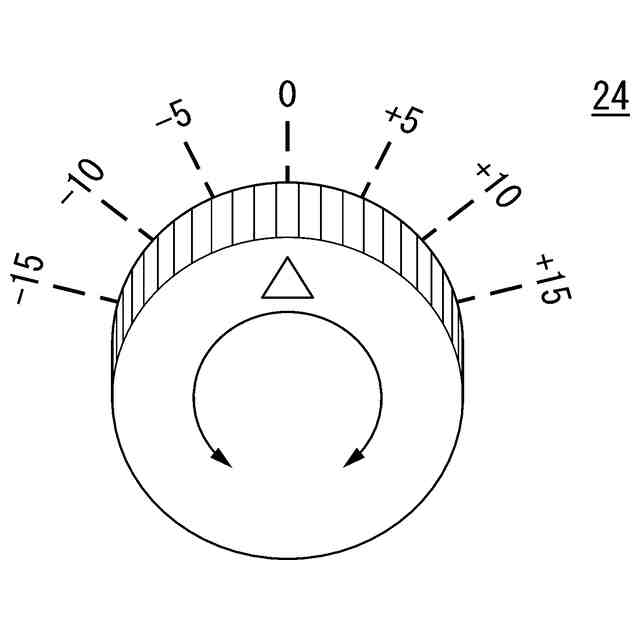
前記速度指示は、回転角によって速度の増減が指示されるダイヤルスイッチを介して受け付けられる、
請求項1から5のうちいずれか一項記載の制御装置。
【請求項7】
前記移動体には、加減速指示を受け付けるための第1操作子と、操舵指示を受け付けるための第2操作子とが設けられており、
前記制御部は、前記第1操作子と前記第2操作子とのいずれか一方に対する操作に基づいて前記移動体の加減速および操舵を制御するモードAと、前記第1操作子と前記第2操作子との双方に対する操作に基づいて前記移動体の加減速および操舵を制御するモードBと、前記第1操作子と前記第2操作子とのいずれに対する操作にも基づかずに前記移動体の加減速および操舵を制御するモードCとを切り換えて実行する、
請求項1から6のうちいずれか1項記載の制御装置。
【請求項8】
前記制御部は、
前記第2目標速度が前記第2速度を超える場合、前記第2目標速度を前記第2速度に制限し、
前記移動体を、前記第2目標速度で移動させる、
請求項1から7のうちいずれか1項記載の制御装置。
【請求項9】
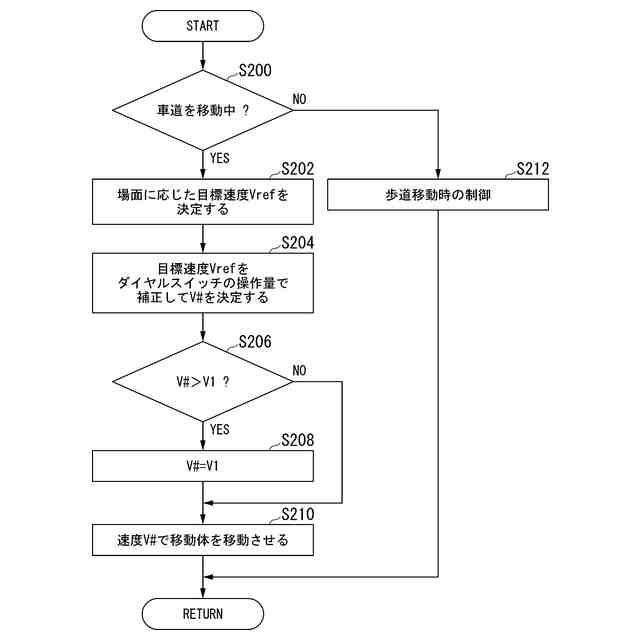
前記制御部は、予め設定されたデフォルト目標速度に対して、前記移動体が移動する場面に応じた補正を行うことで、前記第1目標速度を決定する、
請求項1から8のうちいずれか1項記載の制御装置。
【請求項10】
車道と、車道と異なる所定領域との双方を移動可能な移動体を制御するコンピュータが、
前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識し、
前記移動体の速度を少なくとも部分的に制御し、
前記移動体が車道を移動する場合の速度を第1速度以下に制限し、前記移動体が前記所定領域を移動する場合の速度を前記第1速度よりも低い第2速度以下に制限する、
移動体の制御方法であって、
前記移動体が前記所定領域を移動していると認識された場合、前記コンピュータが、
前記移動体の周辺における物体との関係に基づいて前記第2速度よりも低い第1目標速度を決定し、
決定された前記第1目標速度に対するユーザの速度指示に基づく補正を行うことで、第2目標速度を決定する、
移動体の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御装置、移動体の制御方法、および記憶媒体に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
従来、歩道を移動可能な一人乗り用の電動車両の発明が開示されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2020-189536号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術は、車道と、車道と異なる所定領域との双方を移動可能な移動体を想定したものでは無い。このため、車道と、車道と異なる所定領域との双方において適切な制御を行うことができない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、車道と、車道と異なる所定領域と双方において適切な制御を行うことが可能な移動体の制御装置、移動体の制御方法、および記憶媒体を提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
この発明に係る移動体の制御装置、移動体の制御方法、および記憶媒体は、以下の構成を採用した。
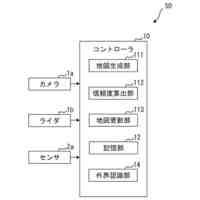
(1):この発明の一態様に係る移動体の制御装置は、車道と、車道と異なる所定領域との双方を移動可能な移動体の制御装置であって、前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識する道路タイプ認識部と、前記移動体の速度を少なくとも部分的に制御する制御部であって、前記移動体が車道を移動する場合の速度を第1速度以下に制限し、前記移動体が前記所定領域を移動する場合の速度を前記第1速度よりも低い第2速度以下に制限する制御部と、を備え、前記制御部は、前記移動体が前記所定領域を移動していると認識された場合、前記移動体の周辺における物体との関係に基づいて前記第2速度よりも低い第1目標速度を決定し、決定された前記第1目標速度に対するユーザの速度指示に基づく補正を行うことで、第2目標速度を決定するものである。
【0007】
(2):上記(1)の態様において、前記道路タイプ認識部は、前記移動体が前記所定領域を移動していることを認識した場合、外部報知装置に、前記所定領域を移動中であることを前記移動体の外部に報知させるものである。
【0008】
(3):上記(1)または(2)の態様において、前記道路タイプ認識部は、前記移動体の外部の状況を検知する外界検知デバイスの出力に基づいて、前記移動体が前記所定領域を移動しているか否かを認識するものである。
【0009】
(4):上記(1)から(3)のいずれかの態様において、前記道路タイプ認識部は、スイッチに対するユーザの操作に基づいて、前記移動体が車道を移動しているか、前記所定領域を移動しているかを認識するものである。
【0010】
(5):上記(1)から(4)のいずれかの態様において、前記制御部は、少なくとも前記移動体が前記所定領域を移動する場合の速度を前記速度指示を参照して自動的に制御し、前記速度指示に関わらず、前記移動体が前記所定領域を移動する場合の速度を前記第2速度以下に制限するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
断続装置
1か月前
本田技研工業株式会社
電動車両
2日前
本田技研工業株式会社
回転電機
9日前
本田技研工業株式会社
発電セル
9日前
本田技研工業株式会社
回転電機
6日前
本田技研工業株式会社
作業用台
6日前
本田技研工業株式会社
電動車両
6日前
本田技研工業株式会社
荷運装置
9日前
本田技研工業株式会社
動力伝達装置
1か月前
本田技研工業株式会社
地図生成装置
19日前
本田技研工業株式会社
動力変換装置
17日前
本田技研工業株式会社
外装部品構造
2日前
本田技研工業株式会社
動力伝達装置
1か月前
本田技研工業株式会社
バッテリパック
11日前
本田技研工業株式会社
充放電ユニット
2日前
本田技研工業株式会社
コイルユニット
11日前
本田技研工業株式会社
繊維強化複合材
11日前
本田技研工業株式会社
コイルユニット
11日前
本田技研工業株式会社
コイルユニット
11日前
本田技研工業株式会社
解重合システム
10日前
本田技研工業株式会社
解重合システム
10日前
本田技研工業株式会社
ロータの製造方法
2日前
本田技研工業株式会社
回転電機のロータ
2日前
本田技研工業株式会社
解重合液生成装置
10日前
本田技研工業株式会社
車両制御システム
2日前
本田技研工業株式会社
回転電機のロータ
2日前
本田技研工業株式会社
能動型騒音低減装置
2日前
本田技研工業株式会社
回転電機用ステータ
17日前
本田技研工業株式会社
二次電池モジュール
2日前
本田技研工業株式会社
車両の容器保持部構造
6日前
本田技研工業株式会社
非接触電力伝送システム
11日前
本田技研工業株式会社
電気回路体及び電子機器
11日前
本田技研工業株式会社
非接触電力伝送システム
11日前
本田技研工業株式会社
基板積層体、及び回転電機
9日前
本田技研工業株式会社
車両制御装置、及び制御方法
9日前
本田技研工業株式会社
シーラ塗布装置及びロボット
9日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ