TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025007679
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023109239
出願日
2023-07-03
発明の名称
シーラ塗布装置及びロボット
出願人
本田技研工業株式会社
,
エクスカテック株式会社
代理人
弁理士法人桐朋
主分類
B05B
12/00 20180101AFI20250109BHJP(霧化または噴霧一般;液体または他の流動性材料の表面への適用一般)
要約
【課題】ロボットアームの先端に緩衝機構を介してシーラ塗布部材が取り付けられたシーラ塗布装置において、簡単な構造による緩衝機構を提供する。
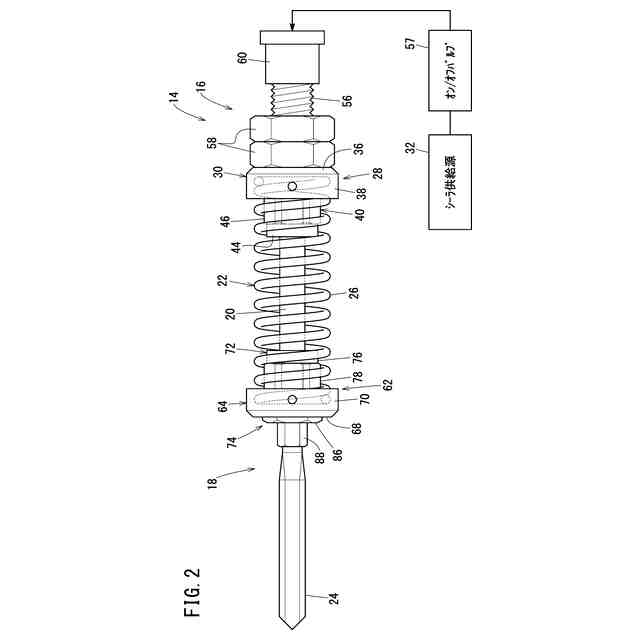
【解決手段】シーラ塗布装置14は、シーラが供給される基端部16と、シーラを塗布対象に塗布するためのノズル24が備えられる先端部18と、先端部と基端部とに接続され、柔軟性を有し、基端部に供給されたシーラを先端部に供給するチューブ20と、チューブを囲み、基端部と先端部との間に保持された弾性部材22と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
シーラが供給される基端部と、
前記シーラを塗布対象に塗布するためのノズルが備えられる先端部と、
前記先端部と前記基端部とに接続され、柔軟性を有し、前記基端部に供給された前記シーラを前記先端部に供給するチューブと、
前記チューブを囲み、前記基端部と前記先端部との間に保持された弾性部材と、
を備える、シーラ塗布装置。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載のシーラ塗布装置であって、
前記弾性部材は、螺旋状のコイルばねを含み、
前記チューブは、前記コイルばねの内側に挿通されている、シーラ塗布装置。
【請求項3】
請求項2に記載のシーラ塗布装置であって、
前記基端部は、
前記基端部に前記シーラを供給するシーラ供給源と、前記チューブとを接続する第1のチューブ継手と、
前記第1のチューブ継手が取り付けられる第1の孔を有し、前記コイルばねを保持する第1の保持部材と、
を備え、
前記先端部は、
前記ノズルと前記チューブとを接続する第2のチューブ継手と、
前記第2のチューブ継手が取り付けられる第2の孔を有し、前記コイルばねを保持する第2の保持部材と、
を備える、シーラ塗布装置。
【請求項4】
請求項3に記載のシーラ塗布装置であって、
前記第1の保持部材は、
前記コイルばねに対して基端方向に位置し、前記コイルばねの基端を保持するとともに前記第1の孔が形成された第1の保持壁部と、
前記第1の保持壁部から先端方向に突出し、前記コイルばねの前記基端を囲む第1の包囲壁と、
を備え、
前記第2の保持部材は、
前記コイルばねに対して前記先端方向に位置し、前記コイルばねの先端を保持するとともに前記第2の孔が形成された第2の保持壁部と、
前記第2の保持壁部から前記基端方向に突出し、前記コイルばねの前記先端を囲む第2の包囲壁と、
を備える、シーラ塗布装置。
【請求項5】
請求項3に記載のシーラ塗布装置であって、
前記第1のチューブ継手は、
前記第1の孔に対して先端方向に位置し、前記チューブの基端が挿入される第1のスリーブと、
前記第1のスリーブに挿入された前記チューブに挿入され、前記第1のスリーブとともに前記チューブを挟持する第1のボディと、
を備え、
前記第1のボディは、
前記第1の保持部材に対して前記先端方向に位置し、前記第1の保持部材に当接する第1のフランジ部と、
前記第1の孔を貫通して基端方向に延在し、前記シーラ供給源に接続されるシリンダ部と、
を有し、
前記第1のフランジ部と、前記シリンダ部に取り付けられる締め付け部材とによって、前記第1の保持部材が挟持される、シーラ塗布装置。
【請求項6】
請求項3に記載のシーラ塗布装置であって、
前記第2のチューブ継手は、
前記第2の孔に対して基端方向に位置し、前記チューブが挿入される第2のスリーブと、
前記ノズルが取り付けられるとともに、前記第2の孔を介して前記チューブに挿入され、前記第2のスリーブとともに前記チューブを挟持する第2のボディと、
を備え、
前記第2のボディは、
前記第2の保持部材に対して先端方向に位置し、前記第2の保持部材に当接する第2のフランジ部を有する、シーラ塗布装置。
【請求項7】
請求項1~6のいずれか1項に記載のシーラ塗布装置と、
前記シーラ塗布装置が装着される作業アームと、
を備える、ロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シーラ塗布装置及びロボットに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
下記特許文献1には、ロボットアームの先端に緩衝機構を介してシーラ塗布部材が取り付けられたシーラ塗布装置が開示されている。緩衝機構は、シーラ塗布部材が受ける外力を吸収する。
【先行技術文献】
【特許文献】
【0003】
特開2007-203245号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示されたシーラ塗布装置の緩衝機構は構造が複雑であるという課題がある。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様は、シーラ塗布装置であって、当該シーラ塗布装置は、シーラが供給される基端部と、前記シーラを塗布対象に塗布するためのノズルが備えられる先端部と、前記先端部と前記基端部とに接続され、柔軟性を有し、前記基端部に供給された前記シーラを前記先端部に供給するチューブと、前記チューブを囲み、前記基端部と前記先端部との間に保持された弾性部材と、を備える。
【0007】
本発明の第2の態様は、ロボットであって、当該ロボットは、第1の態様のシーラ塗布装置と、前記シーラ塗布装置が装着される作業アームと、を備える。
【発明の効果】
【0008】
本発明により、シーラ塗布装置の緩衝機構を簡単な構造にできる。
【図面の簡単な説明】
【0009】
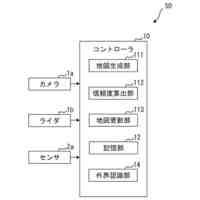
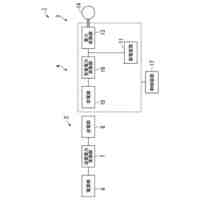
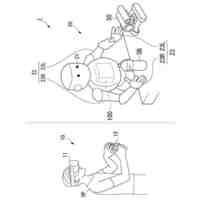
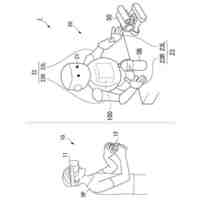
図1は、ロボットの模式図である。
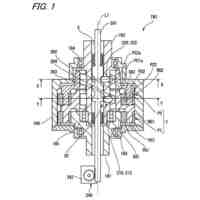
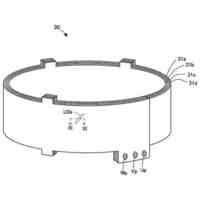
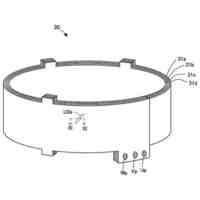
図2は、シーラ塗布装置の側面図である。
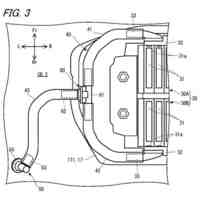
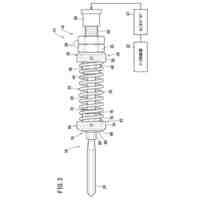
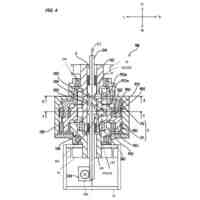
図3は、シーラ塗布装置の断面図である。
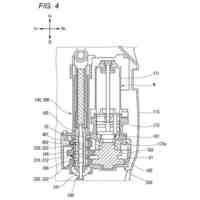
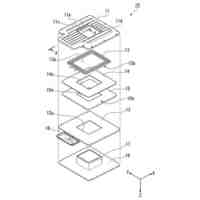
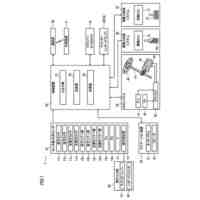
図4は、シーラ塗布装置の分解図である。
【発明を実施するための形態】
【0010】
[ロボットの構成]
図1は、ロボット10の模式図である。ロボット10は作業アーム12を有する。作業アーム12には、シーラ塗布装置14が装着される。スポット溶接では、鋼板同士を点で溶接するため、溶接点間において、鋼板間に隙間が生じることがある。シーラ塗布装置14により鋼板間にシーラが塗布され、シーラにより鋼板間の隙間が埋められる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
本田技研工業株式会社
発電セル
1日前
本田技研工業株式会社
回転電機
1日前
本田技研工業株式会社
荷運装置
1日前
本田技研工業株式会社
動力変換装置
9日前
本田技研工業株式会社
動力伝達装置
23日前
本田技研工業株式会社
地図生成装置
11日前
本田技研工業株式会社
動力伝達装置
23日前
本田技研工業株式会社
繊維強化複合材
3日前
本田技研工業株式会社
コイルユニット
3日前
本田技研工業株式会社
コイルユニット
3日前
本田技研工業株式会社
解重合システム
2日前
本田技研工業株式会社
解重合システム
2日前
本田技研工業株式会社
コイルユニット
3日前
本田技研工業株式会社
バッテリパック
3日前
本田技研工業株式会社
解重合液生成装置
2日前
本田技研工業株式会社
回転電機用ステータ
9日前
本田技研工業株式会社
電気回路体及び電子機器
3日前
本田技研工業株式会社
非接触電力伝送システム
3日前
本田技研工業株式会社
非接触電力伝送システム
3日前
本田技研工業株式会社
基板積層体、及び回転電機
1日前
本田技研工業株式会社
シーラ塗布装置及びロボット
1日前
本田技研工業株式会社
車両制御装置、及び制御方法
1日前
本田技研工業株式会社
動力伝達装置及び動作補助装置
9日前
本田技研工業株式会社
溶解装置および異物分離システム
2日前
本田技研工業株式会社
フレキシブル回路基板、及び回転電機
1日前
本田技研工業株式会社
修理情報提供装置および修理情報提供方法
1日前
本田技研工業株式会社
電極ペーストの製造方法及び電極の製造方法
1日前
本田技研工業株式会社
保管装置及び保管装置における物品の決定方法
2日前
本田技研工業株式会社
情報管理装置、情報管理方法、およびプログラム
1日前
本田技研工業株式会社
情報提供装置、情報提供方法、およびプログラム
2日前
本田技研工業株式会社
把持制御システム、把持制御方法、及びプログラム
3日前
本田技研工業株式会社
把持制御システム、把持制御方法、及びプログラム
3日前
本田技研工業株式会社
基板積層体、回転電機、及びフレキシブル回路基板
1日前
本田技研工業株式会社
リチウム金属二次電池用負極とその製造方法、及びリチウム金属二次電池
1日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
9日前
本田技研工業株式会社
移動体の制御装置、移動体の制御方法、およびプログラム
9日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ