TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025004651
公報種別
公開特許公報(A)
公開日
2025-01-15
出願番号
2023104483
出願日
2023-06-26
発明の名称
把持制御システム、把持制御方法、及びプログラム
出願人
本田技研工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
3/00 20060101AFI20250107BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
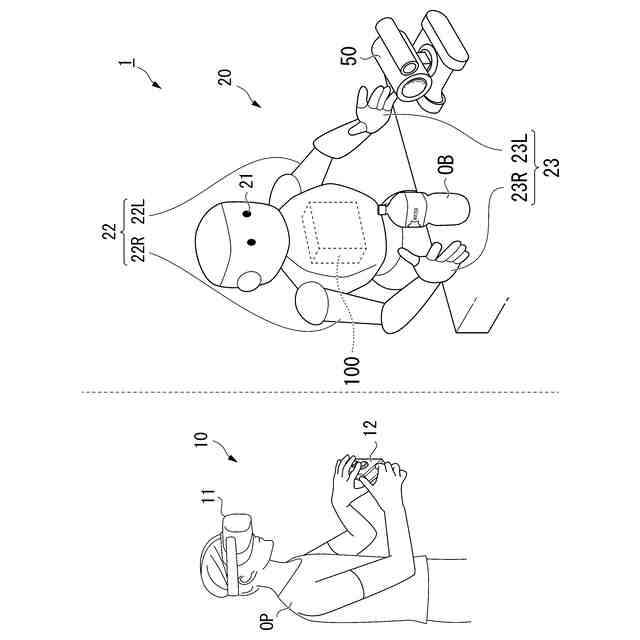
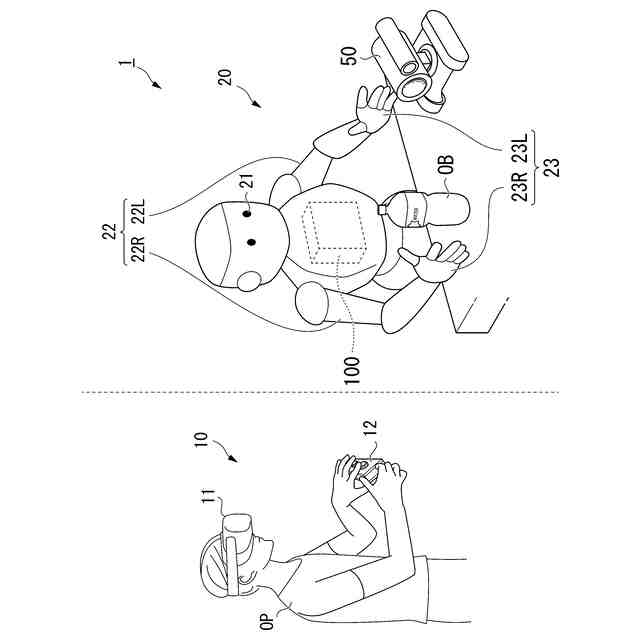
【課題】オブジェクトとエンドエフェクタとの関係性をより正確に把握することで、ロボットを介して遠隔からより正確にオブジェクトを操作することが可能な把持制御システム、把持制御方法、及びプログラムを提供する。
【解決手段】把持制御システムは、オブジェクトを把持可能な複数の指を有するエンドエフェクタと、前記エンドエフェクタに対する操作者の操作指令が入力される入力部と、前記オブジェクトが存在する環境を示す情報である環境情報を取得する取得部と、前記取得部によって取得された前記環境情報と前記入力部に入力された前記操作指令とに基づいて、前記複数の指の中から前記オブジェクトの把持に最も寄与する指である寄与指を選択する選択部と、前記選択部によって選択された前記寄与指に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御する制御部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
オブジェクトを把持可能な複数の指を有するエンドエフェクタと、
前記エンドエフェクタに対する操作者の操作指令が入力される入力部と、
前記オブジェクトが存在する環境を示す情報である環境情報を取得する取得部と、
前記取得部によって取得された前記環境情報と前記入力部に入力された前記操作指令とに基づいて、前記複数の指の中から前記オブジェクトの把持に最も寄与する指である寄与指を選択する選択部と、
前記選択部によって選択された前記寄与指に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御する制御部と、
を備える把持制御システム。
続きを表示(約 1,400 文字)
【請求項2】
前記選択部は、前記オブジェクトを把持する際に用いられる指のパターンが予め分類された把持タクソノミーに基づいて、前記寄与指を選択する、
請求項1に記載の把持制御システム。
【請求項3】
前記エンドエフェクタによって前記オブジェクトが把持される際に前記指が接触する前記オブジェクトの位置を含む位置情報を取得する第2取得部と、
前記選択部によって選択された前記寄与指が接触し得る前記オブジェクトの領域を算出する算出部と、
前記算出部によって算出された前記オブジェクトの領域を含む前記位置情報を取得するよう前記第2取得部を制御する第2制御部と、を更に備える、
請求項1又は2に記載の把持制御システム。
【請求項4】
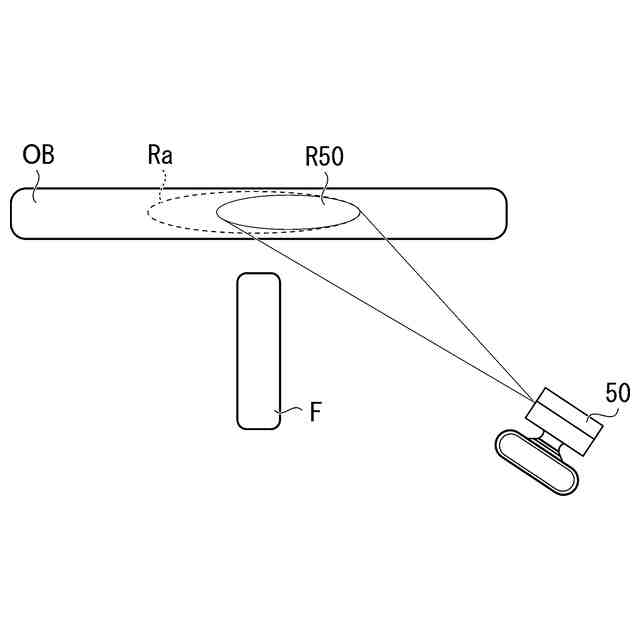
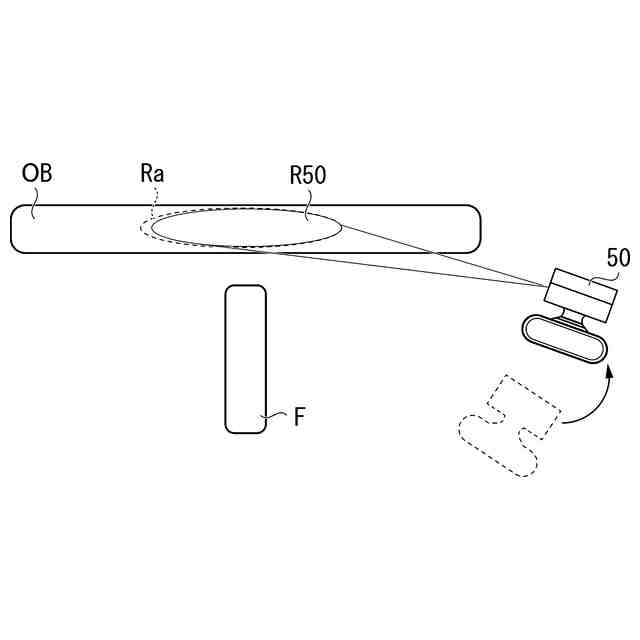
前記取得部は、前記環境を撮像し、前記撮像された環境の画像データを前記環境情報として取得する第1カメラであり、
前記第2取得部は、前記指が接触する前記オブジェクトの位置を前記第1カメラとは異なる視点から撮像し、前記撮像された位置の画像データを前記位置情報として取得する第2カメラである、
請求項3に記載の把持制御システム。
【請求項5】
前記取得部は、前記環境を撮像し、前記撮像された環境の画像データを前記環境情報として取得する第1カメラであり、
前記第2取得部は、機械学習モデルを用いて、前記第1カメラとは異なる視点から前記指が接触する前記オブジェクトを仮想的に観測した場合に生成される画像データを生成し、前記生成された画像データを前記位置情報として取得する、
請求項3に記載の把持制御システム。
【請求項6】
前記制御部は、前記オブジェクトの領域を含む前記位置情報に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御する、
請求項3に記載の把持制御システム。
【請求項7】
操作者が、入力部に、オブジェクトを把持可能な複数の指を有するエンドエフェクタに対する操作指令を入力すること、
取得部が、前記エンドエフェクタによって把持され得るオブジェクトが存在する環境を示す情報である環境情報を取得すること、
選択部が、前記取得部によって取得された前記環境情報と前記入力部に入力された前記操作指令とに基づいて、前記複数の指の中から前記オブジェクトの把持に最も寄与する指である寄与指を選択すること、
制御部が、前記選択部によって選択された前記寄与指に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御すること、
を含む把持制御方法。
【請求項8】
オブジェクトを把持可能な複数の指を有するエンドエフェクタに対する操作者の操作指令が入力される入力部を備えるコンピュータに実行させるためのプログラムであって、
前記オブジェクトが存在する環境を示す情報である環境情報を取得すること、
前記取得された環境情報と前記入力部に入力された前記操作指令とに基づいて、前記複数の指の中から前記オブジェクトの把持に最も寄与する指である寄与指を選択すること、
前記選択された寄与指に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御すること、
を含むプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持制御システム、把持制御方法、及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
近年、人手不足の影響等により、遠隔操作ロボットへの期待が高まっている。これに関連し、操作者がロボットを遠隔操作するための技術が知られている(例えば特許文献1-4参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-065971号公報
特開2011-93067号公報
国際公開第2022/190537号
特開2022-121820号公報
特開2022-156794号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、ロボットの頭部にカメラを搭載し、そのカメラの画像を基に操作者がロボットを遠隔操作していた。しかしながら従来の技術では、ロボットの頭部に搭載されたカメラだけでは、操作すべきオブジェクトと、ロボットのエンドエフェクタ(ロボットハンドともいう)との相対的な関係(位置や距離、角度等)が把握しにくいという問題があった。ロボットの手首の位置にカメラを設け、そのカメラを利用することも検討されているが、エンドエフェクタの指(特に親指)が邪魔になりやすい。さらに、ロボットの手のひらにカメラを設け、そのカメラを利用することも検討されているが、オブジェクトの高さ方向(カメラの奥行方向)の関係が把握しにくい。このような問題から、操作者が所望する位置にロボットの指を的確に合わせることができているのか、又はそうでないのかを操作者は十分に把握できない場合があった。
【0005】
本発明は、このような事情を考慮してなされたものであり、オブジェクトとエンドエフェクタとの関係性をより正確に把握することで、ロボットを介して遠隔からより正確にオブジェクトを操作することができる把持制御システム、把持制御方法、及びプログラムを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
本発明に係る把持制御システム、把持制御方法、及びプログラムは以下の構成を採用した。
(1)本発明の第1の態様は、オブジェクトを把持可能な複数の指を有するエンドエフェクタと、前記エンドエフェクタに対する操作者の操作指令が入力される入力部と、前記オブジェクトが存在する環境を示す情報である環境情報を取得する取得部と、前記取得部によって取得された前記環境情報と前記入力部に入力された前記操作指令とに基づいて、前記複数の指の中から前記オブジェクトの把持に最も寄与する指である寄与指を選択する選択部と、前記選択部によって選択された前記寄与指に基づいて、前記オブジェクトを把持するよう前記エンドエフェクタを制御する制御部と、を備える把持制御システムである。
【0007】
(2)本発明の第2の態様は、第1の態様において、前記選択部は、前記オブジェクトを把持する際に用いられる指のパターンが予め分類された把持タクソノミーに基づいて、前記寄与指を選択するものである。
【0008】
(3)本発明の第3の態様は、第1又は第2の態様において、前記エンドエフェクタによって前記オブジェクトが把持される際に前記指が接触する前記オブジェクトの位置を含む位置情報を取得する第2取得部と、前記選択部によって選択された前記寄与指が接触し得る前記オブジェクトの領域を算出する算出部と、前記算出部によって算出された前記オブジェクトの領域を含む前記位置情報を取得するよう前記第2取得部を制御する第2制御部と、を更に備えるものである。
【0009】
(4)本発明の第4の態様は、第3の態様において、前記取得部は、前記環境を撮像し、前記撮像された環境の画像データを前記環境情報として取得する第1カメラであり、前記第2取得部は、前記指が接触する前記オブジェクトの位置を前記第1カメラとは異なる視点から撮像し、前記撮像された位置の画像データを前記位置情報として取得する第2カメラであるものである。
【0010】
(5)本発明の第5の態様は、第3の態様において、前記取得部は、前記環境を撮像し、前記撮像された環境の画像データを前記環境情報として取得する第1カメラであり、前記第2取得部は、機械学習モデルを用いて、前記第1カメラとは異なる視点から前記指が接触する前記オブジェクトを仮想的に観測した場合に生成される画像データを生成し、前記生成された画像データを前記位置情報として取得するものである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ