TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025006596
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023107492
出願日
2023-06-29
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
B25C
5/06 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】止具の噛み込みを容易に解除可能とし、利便性を向上させる。
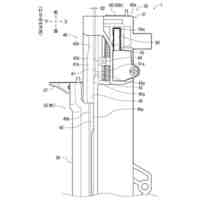
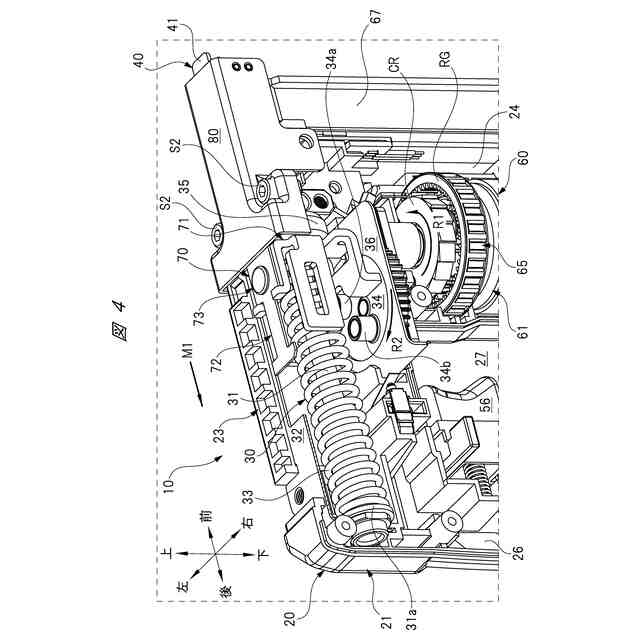
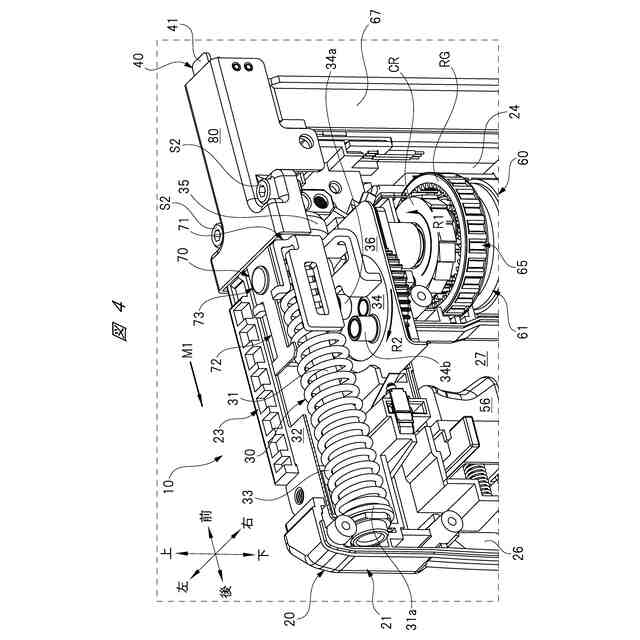
【解決手段】打撃部70は、駆動スプリング33の付勢力を受けるプランジャ71と、打撃時にステープルに当接するドライバブレード72と、を有し、プランジャ71は、ドライバブレード72と係合する第1の係合状態と、ドライバブレード72に対して第1の係合状態よりも大きい一定距離(約15.0mm)だけ相対移動可能にドライバブレード72と係合する第2の係合状態と、を有する。折損したステープル片を噛み込んだ際に、プランジャ71およびドライバブレード72を分離して第2の係合状態とし、プランジャ71を単体で移動させ、プランジャ71によりドライバブレード72を打撃させる。電動タッカ10自身の動作でステープル片の噛み込みを解除でき、利便性が向上する。
【選択図】図4
特許請求の範囲
【請求項1】
止具を打撃する打撃部と、
前記打撃部を第1方向の一方側に付勢する付勢部と、
前記打撃部を前記付勢部の付勢力に抗して前記第1方向の他方側へ移動させる駆動部と、
を備え、
前記打撃部は、
前記付勢部の付勢力を受ける基部と、
打撃時に前記止具に当接する当接部と、
を有し、
前記基部は、前記当接部と係合する第1の係合状態と、前記当接部に対して前記第1の係合状態よりも大きい一定距離だけ相対移動可能に前記当接部と係合する第2の係合状態と、を有する、
作業機。
続きを表示(約 1,300 文字)
【請求項2】
前記打撃部は、前記基部と前記当接部とを係合させる第1の係合部および第2の係合部を備え、
前記第1の係合状態では、前記第1の係合部により前記基部と前記当接部とが係合され、
前記第2の係合状態では、前記第1の係合部により前記基部と前記当接部とが係合されずに、前記第2の係合部により前記基部と前記当接部とが係合される、
請求項1に記載の作業機。
【請求項3】
前記第2の係合部は、前記基部が前記当接部に対して前記第1方向の一方側に相対移動したときに、前記基部の移動力を前記当接部に加える、
請求項2に記載の作業機。
【請求項4】
前記第2の係合部は、前記基部が前記当接部に対して前記第1方向の一方側に相対移動して前記基部と前記当接部とが係合した状態から、前記当接部が前記基部に対して前記第1方向の一方側に一定距離以上相対移動するのを阻止する、
請求項3に記載の作業機。
【請求項5】
前記第2の係合部は、前記基部に設けられる接触面を備え、前記接触面は、前記第1方向の一方側に向けられて前記当接部に接触可能である、
請求項2に記載の作業機。
【請求項6】
前記第1の係合部は、前記第1方向と直交する第2方向から前記基部および前記当接部の双方に挿入することで前記基部と前記当接部とが係合される挿入部を備える、
請求項2に記載の作業機。
【請求項7】
前記基部は、前記第2の係合状態において、前記当接部に対して前記第1方向の一方側に相対移動するときに、前記基部の移動力を前記当接部に加える、
請求項1に記載の作業機。
【請求項8】
前記当接部は、前記第2の係合状態において、前記基部が前記当接部に対して前記第1方向の一方側に相対移動して前記基部と前記当接部とが係合した状態から、前記当接部が前記基部に対して前記第1方向の一方側に一定距離以上相対移動するのを阻止するストッパ部を有する、
請求項7に記載の作業機。
【請求項9】
前記基部の前記当接部に対する相対移動可能距離が、前記駆動部により移動される前記基部の上死点と前記付勢部により移動される前記基部の下死点と間の距離以下である、
請求項1に記載の作業機。
【請求項10】
前記打撃部を形成する前記基部,前記基部を付勢する前記付勢部および前記基部を前記付勢部の付勢力に抗して移動させる前記駆動部を収容するハウジングが設けられ、
前記ハウジングは、
前記打撃部を形成する前記当接部を移動自在に保持し、かつ前記止具を射出する射出部が装着される装着部と、
前記止具が装填されるマガジンを覆う被覆部と、
を備え、
前記射出部および前記マガジンは、前記ハウジングを分解せずに、前記装着部および前記被覆部からそれぞれ分離可能である、
請求項1に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、打撃部により止具を打撃して、当該止具を相手材に向けて射出する作業機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
止具を相手材に向けて射出する作業機の一例が、特許文献1に記載されている。特許文献1に記載された打込機は、スプリングの付勢力により移動されるプランジャと、止具を打撃するドライバブレードと、を有する打撃部と、打撃部をスプリングの付勢力に抗して移動させる電動モータと、打撃部および電動モータを収容するハウジングと、ハウジングに支持されると共に複数の止具が装填されるマガジンと、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2020-019075号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、止具を打ち込む相手材が木材等である場合には、止具には大きな負荷が掛からず、止具を相手材に対して適正に打ち込むことができる。これに対し、止具を誤って鉄板等の高硬度の相手材に射出すると、止具が折損してしまう。すると、ドライバブレードの引き込み動作時において、折損した止具が射出部に噛み込んでしまい、その後のドライバブレードの動作が不能となることがある。
【0005】
この場合、特許文献1に記載された技術では、ハウジングを分解して当該ハウジングに収容された打撃部を取り出して、打撃部を形成するドライバブレードを止具の射出方向にハンマー等で叩くことで、折損した止具の噛み込みを解除する必要があった。作業者がこのような作業を行うのは難しく、例えば、販売店等に修理を依頼する必要があり、ひいては作業時間のロスを招いていた。
【0006】
本発明の目的は、止具の噛み込みを容易に解除することができ、利便性を向上させることが可能な作業機を提供することにある。
【課題を解決するための手段】
【0007】
本発明の一態様では、止具を打撃する打撃部と、前記打撃部を第1方向の一方側に付勢する付勢部と、前記打撃部を前記付勢部の付勢力に抗して前記第1方向の他方側へ移動させる駆動部と、を備え、前記打撃部は、前記付勢部の付勢力を受ける基部と、打撃時に前記止具に当接する当接部と、を有し、前記基部は、前記当接部と係合する第1の係合状態と、前記当接部に対して前記第1の係合状態よりも大きい一定距離だけ相対移動可能に前記当接部と係合する第2の係合状態と、を有する。
【発明の効果】
【0008】
本発明によれば、止具の噛み込みを容易に解除することができ、利便性を向上させることが可能な作業機を実現できる。
【図面の簡単な説明】
【0009】
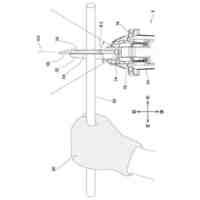
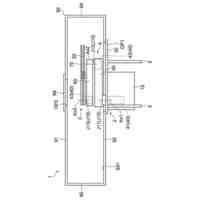
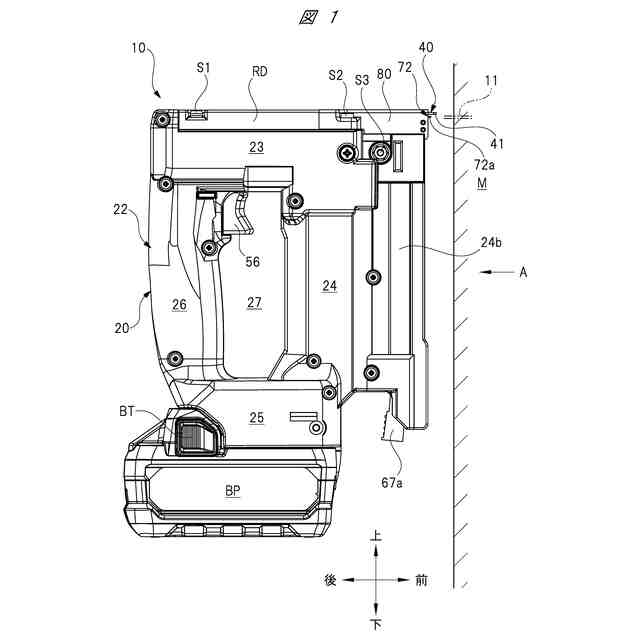
電動タッカを右側から見た図である。
図1のA矢視図である。
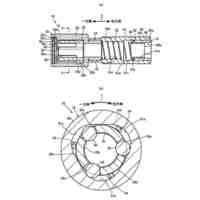
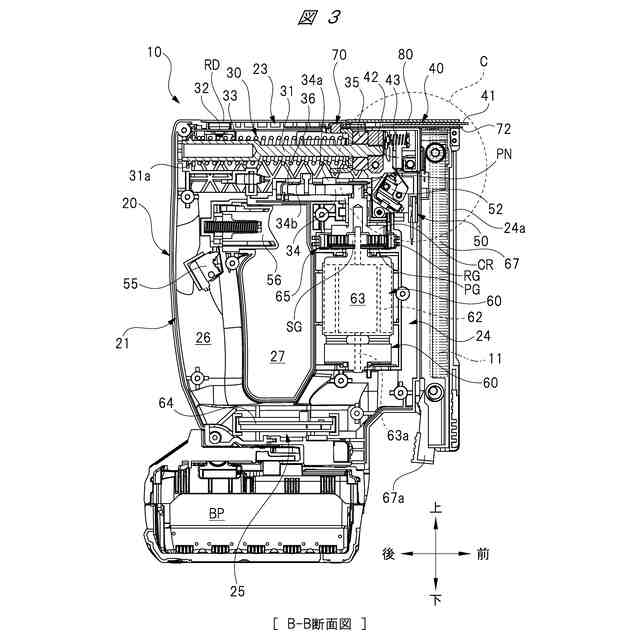
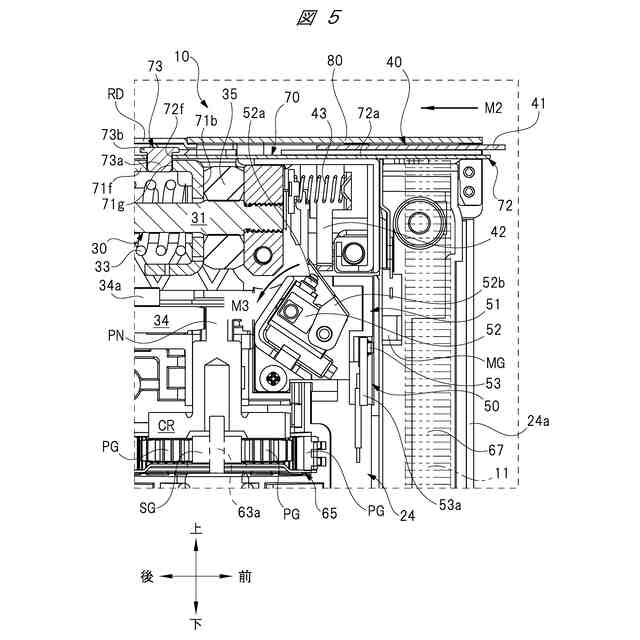
図2のB-B線に沿う断面図である。
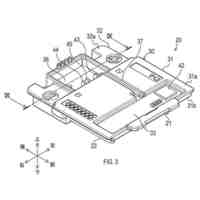
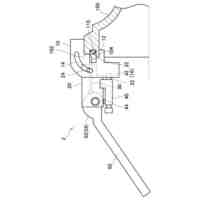
打撃機構を説明する斜視図である。
図3の破線円C部の拡大図である。
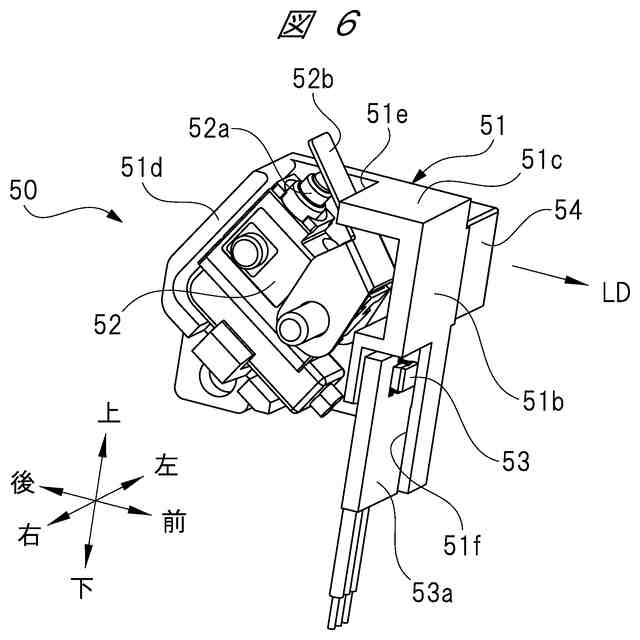
素子ユニット単体を右側かつ前側から見た斜視図である。
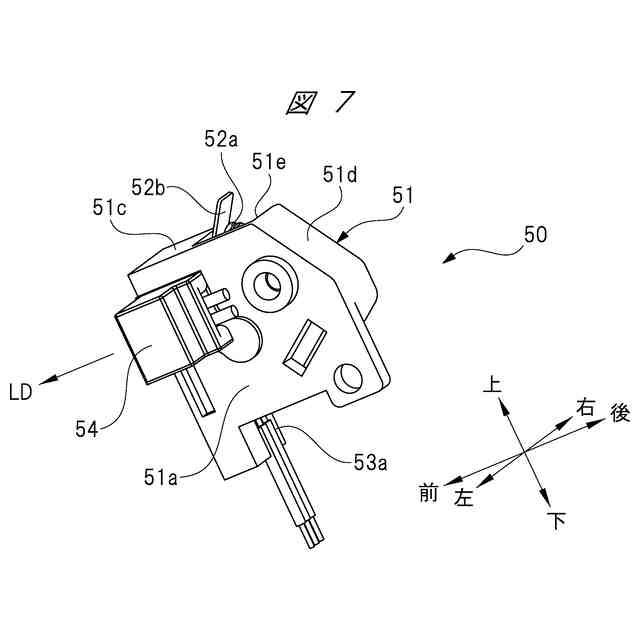
素子ユニット単体を左側かつ後側から見た斜視図である。
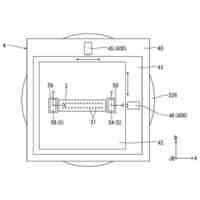
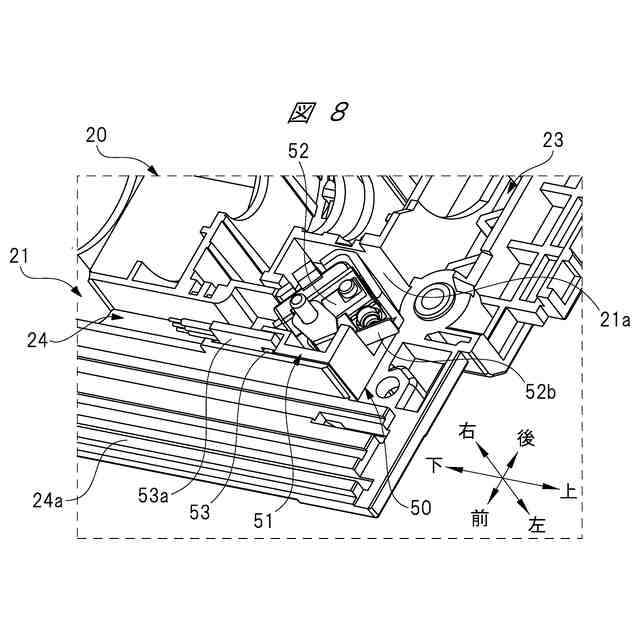
左側ハウジング半体および素子ユニットを示す斜視図である。
右側ハウジング半体および素子ユニットを示す斜視図である。
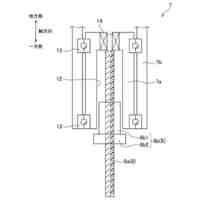
打撃部単体を右側かつ後側から見た斜視図である。
打撃部単体を右側かつ前側から見た斜視図である。
打撃部の通常動作を説明する上側から見た図である。
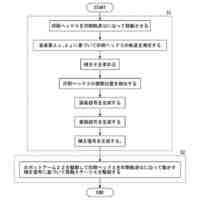
打撃部の噛み込み解除動作を説明する上側から見た図である。
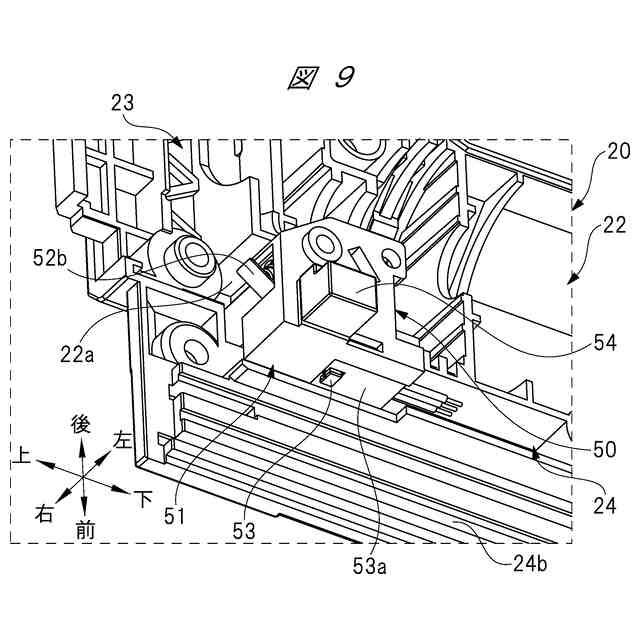
蓋部材の外し方を説明する斜視図である。
固定ピンの外し方を説明する斜視図である。
打撃部の噛み込み解除後の動作を説明する上側から見た図である。
別仕様の電動タッカへの変更手順1を説明する斜視図である。
別仕様の電動タッカへの変更手順2を説明する斜視図である。
別仕様の電動タッカへの変更手順3を説明する斜視図である。
別仕様の電動タッカへの変更手順4を説明する斜視図である。
別仕様の電動タッカへの変更手順5を説明する斜視図である。
別仕様の電動タッカへの変更手順6を説明する斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施の形態について、図面を用いて詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
今日
川崎重工業株式会社
ロボットリスト
今日
川崎重工業株式会社
ロボットアーム
今日
川崎重工業株式会社
ロボットアーム
今日
日本車輌製造株式会社
締め付け工具
今日
CKD株式会社
吸着型搬送装置
14日前
川崎重工業株式会社
ロボットシステム
今日
ジヤトコ株式会社
圧入装置
13日前
株式会社安川電機
ロボット
17日前
株式会社安川電機
ロボット
17日前
株式会社安川電機
ロボット
17日前
モトコマ株式会社
寄せポンチホルダー
1日前
トヨタ自動車株式会社
制御装置及び制御方法
今日
個人
ターンバックル用工具
7日前
株式会社DailyColor
ロボットハンド
1日前
有限会社松尾エンジニアリング
連結部材
1日前
株式会社SHIN‐JIGEN
上肢アシスト装置
6日前
株式会社マキタ
作業機
13日前
株式会社マキタ
バッテリ駆動式機器
20日前
株式会社マキタ
打ち込み工具
17日前
馳逸自動化科技(蘇州)有限公司
物品ピッキングロボット
13日前
株式会社安川電機
ロボット及び基板搬送装置
17日前
ファナック株式会社
人間の技術に基づく経路生成
7日前
株式会社不二越
オフラインダイレクトティーチング装置
7日前
トヨタ自動車株式会社
取り出し治具
13日前
トヨタ自動車株式会社
制御システム、制御方法、及びプログラム
1日前
京都機械工具株式会社
工具
13日前
オリエンタルモーター株式会社
ロボットハンド
17日前
ソフトバンクグループ株式会社
ロボット
今日
株式会社イチネンアクセス
ソケットおよび回転工具
今日
株式会社日立製作所
ロボット制御装置及びロボット制御方法
17日前
セイコーエプソン株式会社
印刷方法およびロボットシステム
今日
トライエンジニアリング株式会社
ロボット装置
1日前
パナソニックIPマネジメント株式会社
工具システム
7日前
パナソニックIPマネジメント株式会社
工具システム
7日前
セイコーエプソン株式会社
ロボットシステムおよび位置検出方法
今日
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ