TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025001742
公報種別
公開特許公報(A)
公開日
2025-01-09
出願番号
2023101382
出願日
2023-06-21
発明の名称
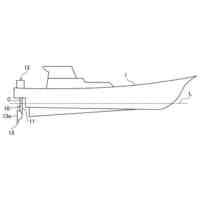
船舶の操舵制御装置および方法、並びに船舶
出願人
ヤマハ発動機株式会社
代理人
個人
,
個人
主分類
B63H
25/02 20060101AFI20241226BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】ステアリング操作がなされなくても、自動操船モードの解除後におけるステアリング操作上の違和感を抑制する。
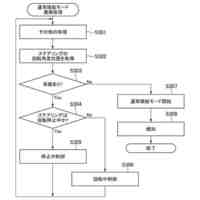
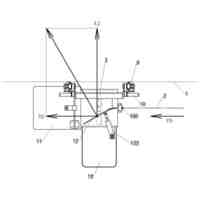
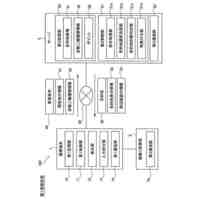
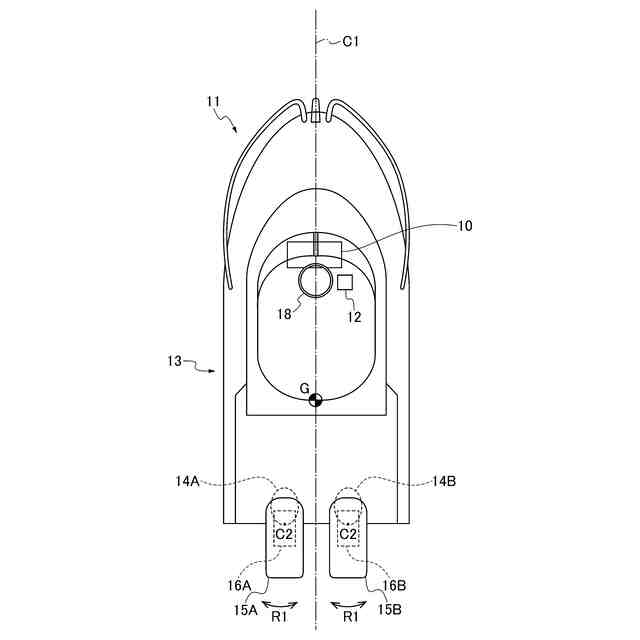
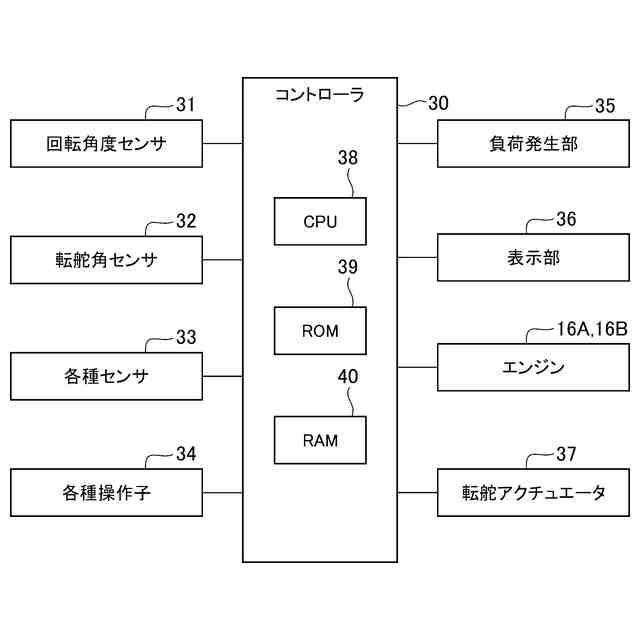
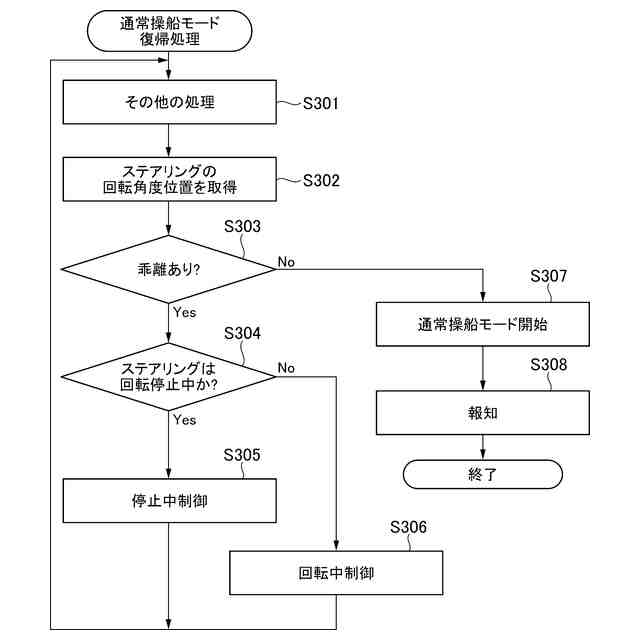
【解決手段】ステアリングホイール18の回転可能角度は規制されている。ステアリングホイール18の回転角度位置に基づいて、ステアリングホイール18の回転が停止中であるか否かが判定される。コントローラ30は、自動操船モードから通常操船モードへ移行させる復帰制御において、ステアリングホイール18が回転停止中である場合は、ステアリングホイール18の回転角度位置に対応する転舵角と船外機15の実転舵角との乖離が小さくなるように、転舵アクチュエータ37を制御する第1の制御を実行する。
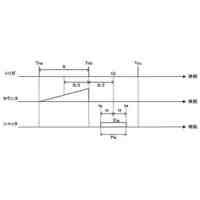
【選択図】図8
特許請求の範囲
【請求項1】
回転可能角度が規制されたステアリングと、
船体を推進させる推進機の転舵角を変化させる転舵駆動部と、
操船モードとして、前記ステアリングの回転操作に応じて操船する通常操船モードと、前記ステアリングの回転操作によらずに自動で操船する自動操船モードとを制御する制御部と、
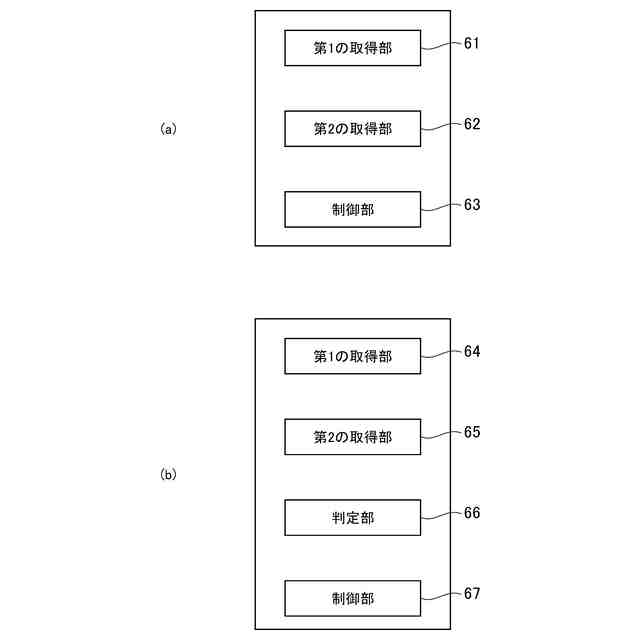
前記ステアリングの回転角度位置を取得する第1の取得部と、
前記推進機の実転舵角を取得する第2の取得部と、
前記第1の取得部により取得された回転角度位置に基づいて、前記ステアリングの回転が停止中であるか否かを判定する判定部と、を有し、
前記制御部は、前記自動操船モードから前記通常操船モードへ移行させる復帰制御において、前記判定部による判定の結果、前記ステアリングが回転停止中である場合は、前記第1の取得部により取得された前記回転角度位置に対応する転舵角と前記第2の取得部により取得された前記実転舵角との乖離が小さくなるように前記転舵駆動部を制御する第1の制御を実行する、船舶の操舵制御装置。
続きを表示(約 1,000 文字)
【請求項2】
前記制御部は、前記第1の制御においては、前記推進機の転舵角の時間当たりの変化量を前記乖離の量に基づいて決定する、請求項1に記載の船舶の操舵制御装置。
【請求項3】
前記制御部は、前記第1の制御においては、目標時間内に前記乖離がなくなるように前記変化量を決定する、請求項2に記載の船舶の操舵制御装置。
【請求項4】
前記制御部は、前記第1の制御においては、前記推進機の転舵角の時間当たりの変化量を、船速または前記推進機における駆動源の回転数の少なくとも一方に基づいて決定する、請求項1に記載の船舶の操舵制御装置。
【請求項5】
前記制御部は、前記復帰制御の開始後、前記乖離がなくなったら前記復帰制御を終了すると共に、前記通常操船モードを開始する、請求項1に記載の船舶の操舵制御装置。
【請求項6】
前記制御部は、前記通常操船モードを開始した場合、その旨を報知する、請求項5に記載の船舶の操舵制御装置。
【請求項7】
前記制御部は、前記復帰制御において、前記判定部による判定の結果、前記ステアリングが回転中である場合は、第2の制御を実行し、
前記第2の制御においては、前記制御部は、前記回転角度位置に対応する転舵角が前記実転舵角に近づく方向へ前記ステアリングが回転している場合は、前記ステアリングの回転量に対応する転舵角をより小さい値に補正した値だけ前記推進機の転舵角を変化させ、前記回転角度位置に対応する転舵角が前記実転舵角から遠ざかる方向へ前記ステアリングが回転している場合は、前記ステアリングの回転量に対応する転舵角をより大きい値に補正した値だけ前記推進機の転舵角を変化させる、請求項1に記載の船舶の操舵制御装置。
【請求項8】
前記制御部は、前記第1の制御の開始後、前記乖離がなくなる前に前記ステアリングが回転中となった場合は、前記第1の制御を終了すると共に前記第2の制御を実行する、請求項7に記載の船舶の操舵制御装置。
【請求項9】
前記制御部は、前記第2の制御の開始後、前記乖離がなくなる前に前記ステアリングが回転停止中となった場合は、前記第2の制御を終了すると共に前記第1の制御を実行する、請求項7に記載の船舶の操舵制御装置。
【請求項10】
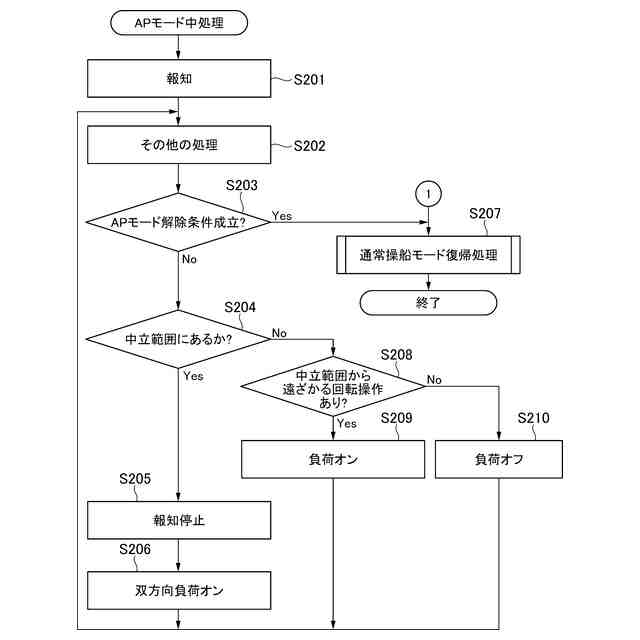
前記制御部は、前記自動操船モードの解除が指示されたことに応じて前記復帰制御を開始する、請求項1に記載の船舶の操舵制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶の操舵制御装置および方法、並びに船舶に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
船舶において、ステアリング操作によらずに進路を自動制御するなどの自動操船モードを有するものがある。回転可能角度が規制されたステアリングを備える船舶では、ステアリングの回転角度位置において中立位置の概念があり、回転角度位置に対して推進機の転舵角が対応している。
【0003】
このような船舶においては、自動操船モードを解除して通常操船モードへ移行した時点で、ステアリングの現在の回転角度位置と推進機の現在の実転舵角とが乖離している場合がある。上記乖離が生じたままだと、ステアリング操作をするときに違和感が生じる。
【0004】
そこで、特許文献1では、ステアリング操作に対する推進機の転舵角の変化量を、ステアリングの回転方向と推進機の現在の実転舵角の方向との異同に応じて補正することで、上記乖離を徐々に小さくしていく技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
米国特許第10196122号明細書
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1では、ステアリングの回転停止中には上記乖離は小さくならない。例えば、上記乖離が生じている状態で解除指示がボタン操作等によって与えられた後、ステアリング操作がなされない場合は、上記乖離が維持されたままとなる。従って、自動操船モードから通常操船モードへ移行する際、ステアリング操作がなされない場合も考慮してステアリング操作上の違和感を抑制する観点で、改善の余地がある。
【0007】
本発明は、ステアリング操作がなされなくても、自動操船モードの解除後におけるステアリング操作上の違和感を抑制することができる船舶の操舵制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
この発明の一態様による船舶の操舵制御装置は、回転可能角度が規制されたステアリングと、船体を推進させる推進機の転舵角を変化させる転舵駆動部と、操船モードとして、前記ステアリングの回転操作に応じて操船する通常操船モードと、前記ステアリングの回転操作によらずに自動で操船する自動操船モードとを制御する制御部と、前記ステアリングの回転角度位置を取得する第1の取得部と、前記推進機の実転舵角を取得する第2の取得部と、前記第1の取得部により取得された回転角度位置に基づいて、前記ステアリングの回転が停止中であるか否かを判定する判定部と、を有し、前記制御部は、前記自動操船モードから前記通常操船モードへ移行させる復帰制御において、前記判定部による判定の結果、前記ステアリングが回転停止中である場合は、前記第1の取得部により取得された前記回転角度位置に対応する転舵角と前記第2の取得部により取得された前記実転舵角との乖離が小さくなるように前記転舵駆動部を制御する第1の制御を実行する。
【0009】
この構成によれば、ステアリングの回転可能角度が規制されている。転舵駆動部により、船体を推進させる推進機の転舵角が変化する。操船モードとして、前記ステアリングの回転操作に応じて操船する通常操船モードと、前記ステアリングの回転操作によらずに自動で操船する自動操船モードとが制御される。取得された回転角度位置に基づいて、前記ステアリングの回転が停止中であるか否かを判定される。前記自動操船モードから前記通常操船モードへ移行させる復帰制御において、前記判定部による判定の結果、前記ステアリングが回転停止中である場合は、取得された前記回転角度位置に対応する転舵角と取得された前記実転舵角との乖離が小さくなるように前記転舵駆動部を制御する第1の制御が実行される。
【発明の効果】
【0010】
本発明によれば、ステアリング操作がなされなくても、自動操船モードの解除後におけるステアリング操作上の違和感を抑制することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ヤマハ発動機株式会社
船外機
2日前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
24日前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
1か月前
ヤマハ発動機株式会社
鞍乗型車両
2日前
ヤマハ発動機株式会社
実装システム
2日前
ヤマハ発動機株式会社
部品実装装置
1か月前
ヤマハ発動機株式会社
自動試刷りシステム
1か月前
ヤマハ発動機株式会社
部品実装機および部品撮像方法
23日前
ヤマハ発動機株式会社
船舶用ステアリング装置及び船舶
23日前
ヤマハ発動機株式会社
情報処理システム、情報処理方法
2日前
ヤマハ発動機株式会社
並列多気筒エンジン搭載MT型鞍乗型車両
1か月前
ヤマハ発動機株式会社
表面実装機、部品供給ユニット及び検査方法
23日前
ヤマハ発動機株式会社
船舶の操舵制御装置および方法、並びに船舶
2日前
ヤマハ発動機株式会社
船舶の操舵制御装置および方法、並びに船舶
2日前
ヤマハ発動機株式会社
テープ先端処理治具およびテープ先端処理方法
1か月前
ヤマハ発動機株式会社
監視装置、表面実装機及び監視装置の位置調整方法
25日前
ヤマハ発動機株式会社
農作業者の見守りシステム、農作業者の見守り方法、及びプログラム
1か月前
ヤマハ発動機株式会社
ノズル配置計画の改善装置、及び、ノズル配置計画の改善プログラム
1か月前
ヤマハ発動機株式会社
目的地提案システム、鞍乗り型車両の目的地提案システム用サーバおよび目的地提案方法
23日前
ヤマハ発動機株式会社
画像処理装置、部品把持システム、画像処理方法および部品把持方法
2日前
個人
川下り用船
1か月前
個人
シーアンカー
4か月前
個人
発電船
2か月前
個人
水難救命スーツ
11か月前
個人
船舶用プロペラ
10か月前
個人
流体抵抗低減省エネ船
9か月前
小柳建設株式会社
台船
4か月前
個人
簡易型ライフジャケット
11か月前
個人
船舶推進装置
11か月前
ウラカミ合同会社
曳航ロボット
5か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ