TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024179982
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2023099366
出願日
2023-06-16
発明の名称
減衰力制御装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60G
17/015 20060101AFI20241219BHJP(車両一般)
要約
【課題】ショックアブソーバの減衰力を制御する上で車両の構造が複雑化するのを抑制することが可能な減衰力制御装置を得る。
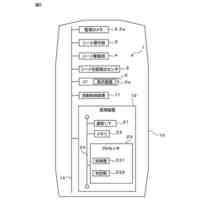
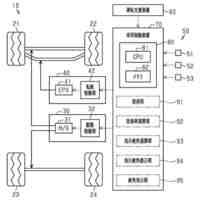
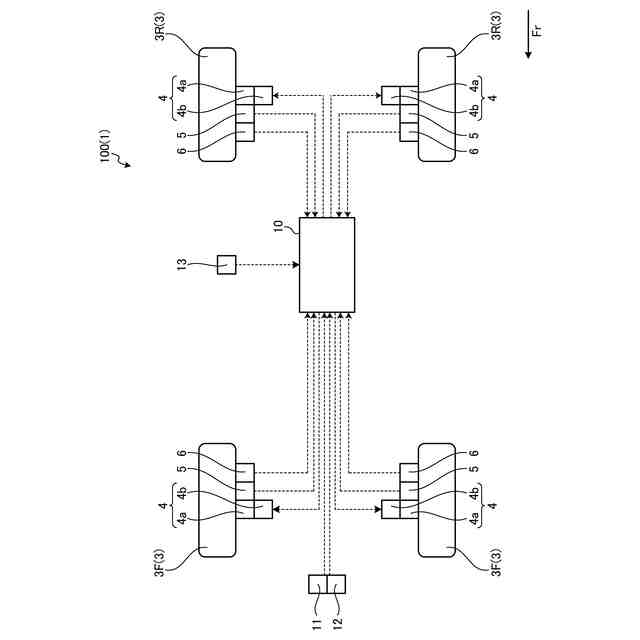
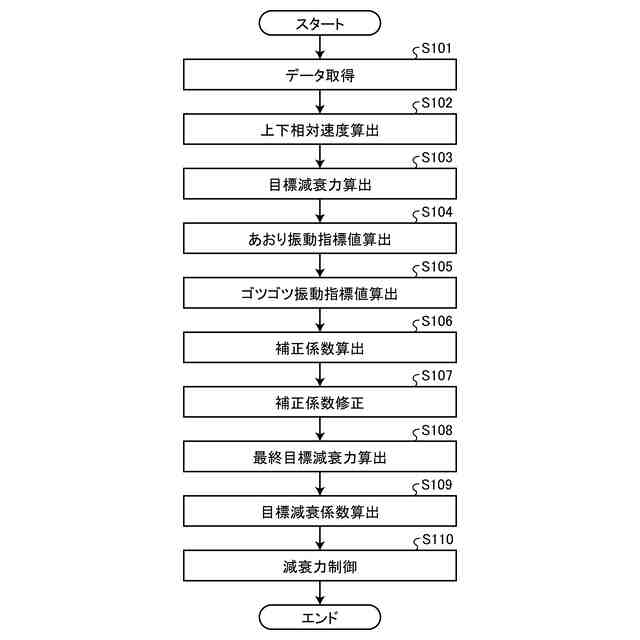
【解決手段】減衰力制御装置は、車両の上下方向の加速度以外の車両の運動に関する第1の物理量を入力して車両の上下方向の運動に関わる第2の物理量を出力する学習済みモデルを利用して、第1の物理量の実測値から第2の物理量を推定し、推定した第2の物理量に基づいて、ショックアブソーバの目標減衰係数を算出する算出部と、算出された目標減衰係数に基づいて、ショックアブソーバの減衰力を制御する減衰力制御部と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
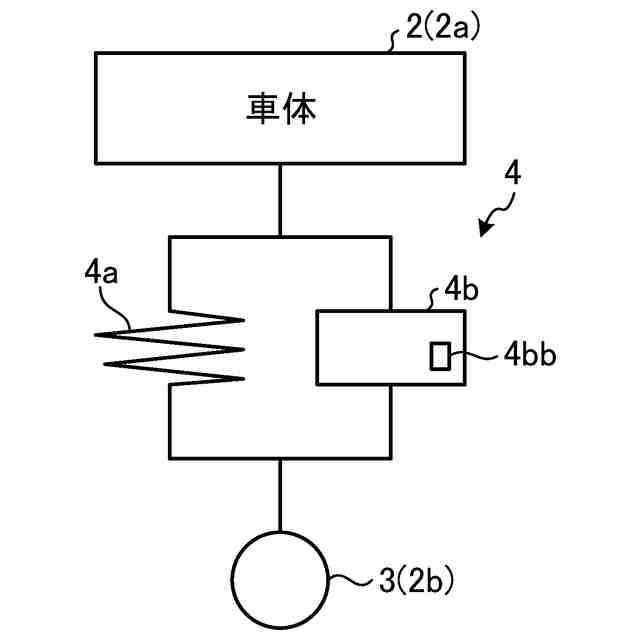
車両の車輪と前記車両の車体との間に介在するショックアブソーバを制御する減衰力制御装置であって、
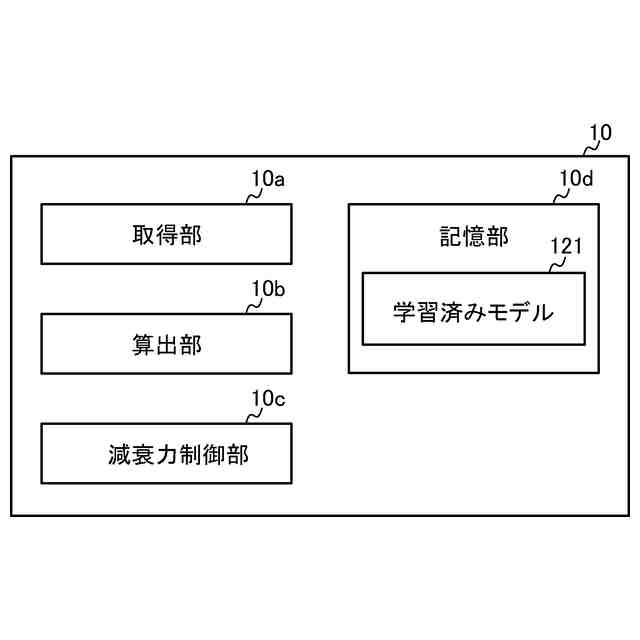
前記車両の上下方向の加速度以外の前記車両の運動に関する第1の物理量を入力して前記車両の上下方向の運動に関わる第2の物理量を出力する学習済みモデルを利用して、前記第1の物理量の実測値から前記第2の物理量を推定し、推定した前記第2の物理量に基づいて、前記ショックアブソーバの目標減衰係数を算出する算出部と、
算出された前記目標減衰係数に基づいて、前記ショックアブソーバの減衰力を制御する減衰力制御部と、
を備えた減衰力制御装置。
続きを表示(約 400 文字)
【請求項2】
前記第1の物理量は、前記車輪の回転に応じた前記車輪に関する速度と、前記車両の前後方向の加速度と、前記車両の横方向の加速度と、前記車両のヨーレートと、前記車輪の舵角と、前記車輪の舵角速度と、前記車輪の回転トルクと、前記目標減衰係数に応じて前記ショックアブソーバに入力される電流の値とのうちの少なくとも一つを含む、
請求項1に記載の減衰力制御装置。
【請求項3】
前記算出部は、推定した前記第2の物理量と、前記車輪に関する速度とに基づいて、前記ショックアブソーバの目標減衰係数を算出し、
前記車輪に関する速度は、複数の前記車輪のそれぞれの回転速度と、前記複数の前記車輪の対角方向に並ぶ二つの前記車輪の前記回転速度の差分と、前記車両の前後方向に並ぶ二つの前記車輪の前記回転速度の差分とのうちの少なくとも一つを含む、
請求項1に記載の減衰力制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、減衰力制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両に設けられ、サスペンションのショックアブソーバの減衰力を制御し、乗り心地の向上や走行安定性の向上を図ることができる減衰力制御装置がある。この種の減衰力制御装置として、例えば、車両に搭載された上下加速度センサの出力値に基づいて、車両の上下方向の振動における中周波成分と低周波成分との比率を算出し、当該比率に基づいてショックアブソーバの減衰力を制御する減衰力制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第6478063号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、ショックアブソーバの減衰力の制御のための専用の上下加速度センサを車両に設けるため、車両の構造が複雑化するという問題がある。
【0005】
本発明の実施形態が解決しようとする課題の一つは、ショックアブソーバの減衰力を制御する上で車両の構造が複雑化するのを抑制することが可能な減衰力制御装置を得ることである。
【課題を解決するための手段】
【0006】
本発明の実施形態の減衰力制御装置は、車両の車輪と前記車両の車体との間に介在するショックアブソーバを制御する減衰力制御装置であって、前記車両の上下方向の加速度以外の前記車両の運動に関する第1の物理量を入力して前記車両の上下方向の運動に関わる第2の物理量を出力する学習済みモデルを利用して、前記第1の物理量の実測値から前記第2の物理量を推定し、推定した前記第2の物理量に基づいて、前記ショックアブソーバの目標減衰係数を算出する算出部と、算出された前記目標減衰係数に基づいて、前記ショックアブソーバの減衰力を制御する減衰力制御部と、を備える。
【0007】
上記構成によれば、算出部が、学習済みモデルを利用して、車両の上下方向の加速度以外の車両の運動に関する第1の物理量の実測値からショックアブソーバの目標減衰係数を算出するので、ショックアブソーバの減衰力の制御のための専用の上下加速度センサを車両に設ける必要がない。よって、ショックアブソーバの減衰力を制御する上で車両の構造が複雑化するのを抑制することができる。
【0008】
前記減衰力制御装置では、例えば、前記第1の物理量は、前記車輪の回転に応じた前記車輪に関する速度と、前記車両の前後方向の加速度と、前記車両の横方向の加速度と、前記車両のヨーレートと、前記車輪の舵角と、前記車輪の舵角速度と、前記車輪の回転トルクと、前記目標減衰係数に応じて前記ショックアブソーバに入力される電流の値とのうちの少なくとも一つを含む。
【0009】
このような構成によれば、車輪に関する速度と、車両の前後方向の加速度と、車両の横方向の加速度と、車両のヨーレートと、車輪の舵角と、車輪の舵角速度と、車輪の回転トルクと、目標減衰係数に応じてショックアブソーバに入力される電流の値とのうちの少なくとも一つから、目標減衰係数を算出することができる。
【0010】
前記減衰力制御装置では、例えば、前記算出部は、推定した前記第2の物理量と、前記車輪に関する速度とに基づいて、前記ショックアブソーバの目標減衰係数を算出し、前記車輪に関する速度は、複数の前記車輪のそれぞれの回転速度と、前記複数の前記車輪の対角方向に並ぶ二つの前記車輪の前記回転速度の差分と、前記車両の前後方向に並ぶ二つの前記車輪の前記回転速度の差分とのうちの少なくとも一つを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
運転支援装置
6日前
株式会社アイシン
検知システム
6日前
株式会社アイシン
運転支援装置
6日前
株式会社アイシン
ドア支持装置
6日前
株式会社アイシン
マニホールド
12日前
株式会社アイシン
回路モジュール
今日
株式会社アイシン
配送支援システム
6日前
株式会社アイシン
ディファレンシャル装置
6日前
株式会社アイシン
車両用のバッテリーケース
5日前
株式会社アイシン
情報処理装置、および、アノテーションプログラム
今日
トヨタ自動車株式会社
運転者監視装置
6日前
トヨタ自動車株式会社
監視装置、監視用コンピュータプログラム及び監視方法
6日前
株式会社アドヴィックス
車両制御装置及び車両制御プログラム
5日前
トヨタ自動車株式会社
眠気兆候通知装置、眠気兆候通知方法、および眠気兆候通知用コンピュータプログラム
6日前
株式会社アドヴィックス
曲率推定装置、車両制御装置及び曲率推定プログラム
5日前
個人
車両
2か月前
個人
眼科手術車
27日前
個人
授乳用車両
19日前
個人
自動車運転補助装置
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
5日前
井関農機株式会社
作業車両
19日前
井関農機株式会社
作業車両
1か月前
個人
空気圧調節式ホイール。
4か月前
個人
台車用車輪止め具
28日前
個人
キャンピングトレーラー
1か月前
個人
自動車外部装着用しめ飾り
2か月前
日本精機株式会社
車外表示装置
3か月前
日本精機株式会社
車載表示装置
1か月前
個人
謝意シグナル装着車
1か月前
日本精機株式会社
車載表示装置
2か月前
エムケー精工株式会社
洗車装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
3か月前
日本精機株式会社
車両用表示装置
1か月前
株式会社青木製作所
タンクローリ
28日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ