TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024175326
公報種別
公開特許公報(A)
公開日
2024-12-18
出願番号
2023093024
出願日
2023-06-06
発明の名称
オーダ処理方法および制御装置
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
1/137 20060101AFI20241211BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】緊急オーダを効率よく処理できるように割り当てることができるオーダ処理方法および制御装置を提供する。
【解決手段】実施形態によれば、オーダ処理方法は、オーダに応じて自動搬送装置が搬送する棚から物品をピックアップする作業を実施する複数のステーションを有する物流システムに用いる方法である。オーダ処理方法は、緊急オーダを受け付け、前記緊急オーダの内容と各ステーションに割り当てたオーダの内容とに基づいて前記緊急オーダを割り当てるステーションを決定し、前記緊急オーダを割り当てたステーションに前記緊急オーダで使用する棚を前記自動搬送装置によって配置させる。
【選択図】 図14
特許請求の範囲
【請求項1】
オーダに応じて自動搬送装置が搬送する棚から物品をピックアップする作業を実施する複数のステーションを有する物流システムに用いるオーダ処理方法であって、
緊急オーダを受け付け、
前記緊急オーダの内容と各ステーションに割り当てたオーダの内容とに基づいて前記緊急オーダを割り当てるステーションを決定し、
前記緊急オーダを割り当てたステーションに前記緊急オーダで使用する棚を前記自動搬送装置によって配置させる、
オーダ処理方法。
続きを表示(約 1,200 文字)
【請求項2】
前記緊急オーダで使用する棚と各ステーションに配置している棚とに基づいて前記緊急オーダを割り当てるステーションを決定する、
請求項1に記載のオーダ処理方法。
【請求項3】
前記緊急オーダで使用する全ての棚を配置しているステーションに前記緊急オーダを割り当てる、
請求項2に記載のオーダ処理方法。
【請求項4】
前記緊急オーダで使用する棚の一部を配置しているステーションのうち共通する棚の数が最も多いステーションに前記緊急オーダを割り当てる、
請求項3に記載のオーダ処理方法。
【請求項5】
前記緊急オーダで使用する棚の一部を配置しているステーションのうち共通する棚の数が最も多いステーションが複数ある場合、前記共通する棚の数が最も多い複数のステーションのうち未処理の割り当て済みオーダが最も少ないステーションに前記緊急オーダを割り当てる、
請求項4に記載のオーダ処理方法。
【請求項6】
前記緊急オーダで使用する棚を配置しているステーションがない場合、未処理の割り当て済みオーダが最も少ないステーションに前記緊急オーダを割り当てる、
請求項5に記載のオーダ処理方法。
【請求項7】
前記緊急オーダを割り当てたステーションで実施中のオーダが完了する推定時間が所定時間以上であれば前記実施中のオーダに対する処理を中断して前記緊急オーダに対する処理を実施し、前記緊急オーダを割り当てたステーションで実施中のオーダが完了する推定時間が所定時間未満であれば前記実施中のオーダを完了してから前記緊急オーダに対する処理を実施する、
請求項4乃至6の何れか1項に記載のオーダ処理方法。
【請求項8】
さらに、前記緊急オーダを割り当てたステーションに設けた端末装置の表示部に緊急オーダが割り当てられたことを喚起する案内を表示する、
請求項1に記載のオーダ処理方法。
【請求項9】
さらに、前記緊急オーダを割り当てたステーションにおいて前記緊急オーダに対する処理を実施中に前記端末装置の表示部に前記緊急オーダの作業案内と共に緊急オーダを実施中であることを示す案内を表示する、
請求項8に記載のオーダ処理方法。
【請求項10】
オーダに応じて自動搬送装置が搬送する棚から物品をピックアップする作業を実施する複数のステーションを有する物流システムの制御装置であって、
物品を保管する棚を搬送する自動搬送装置と通信する搬送車通信部と、
上位管理装置からの緊急オーダを受信する上位通信部と、
前記緊急オーダの内容と各ステーションに割り当て済みのオーダの内容とに基づいて前記緊急オーダを割り当てるステーションを決定し、前記緊急オーダを割り当てたステーションに前記緊急オーダで使用する棚を前記自動搬送装置によって配置させる、プロセッサと、
を備える制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、オーダ処理方法および制御装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
近年、自動搬送車(automated guided vehicle(AGV))を用いて出荷オーダが示す物品を格納する棚を仕分け作業の作業場となるステーションへ搬送するシステムが提供されている。従来のシステムは、緊急(割り込み)で処理をしたいオーダ(以下、緊急オーダと称する)が発生した場合、ステーションに割り当てた既存のオーダが完了した後に緊急オーダの処理を行うようになっている。すなわち、従来のシステムでは、緊急オーダが発生しても割り当て済みの既存のオーダが完了するまで緊急オーダの処理を開始できないという問題がある。
【0003】
また、従来のシステムとしては、ステーションにいる作業者が手作業で緊急オーダを入力することにより当該ステーションで緊急オーダの処理を行うものが提案されている。このようなシステムでは、作業場にいる作業員が緊急オーダを手作業で入力する手間がかかり、作業員が緊急オーダを入力したステーションで当該緊急オーダを処理するためシステム全体として効率良く緊急オーダを処理するようにできないという問題がある。
【先行技術文献】
【特許文献】
【0004】
特開平2-48308号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記の課題を解決するため、緊急オーダを効率よく処理できるように割り当てることができるオーダ処理方法および制御装置を提供する。
【課題を解決するための手段】
【0006】
実施形態によれば、オーダ処理方法は、オーダに応じて自動搬送装置が搬送する棚から物品をピックアップする作業を実施する複数のステーションを有する物流システムに用いる方法である。オーダ処理方法は、緊急オーダを受け付け、前記緊急オーダの内容と各ステーションに割り当てたオーダの内容とに基づいて前記緊急オーダを割り当てるステーションを決定し、前記緊急オーダを割り当てたステーションに前記緊急オーダで使用する棚を前記自動搬送装置によって配置させる。
【図面の簡単な説明】
【0007】
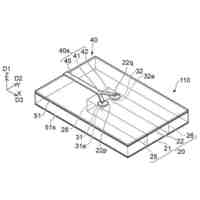
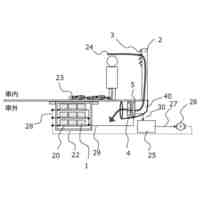
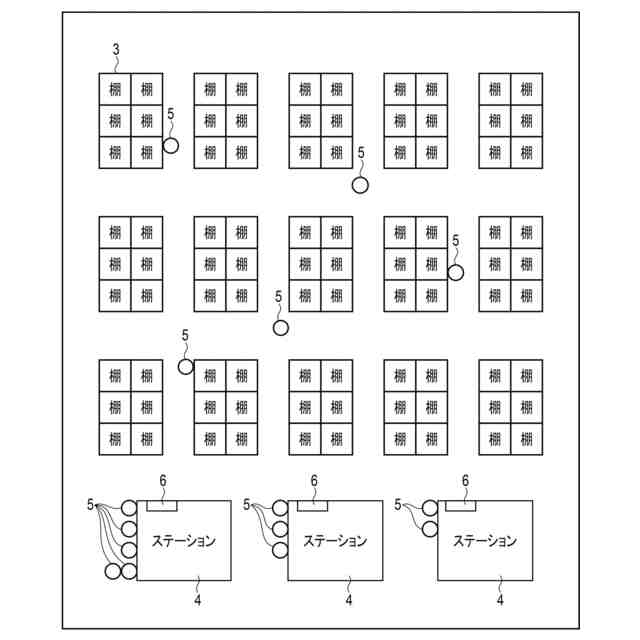
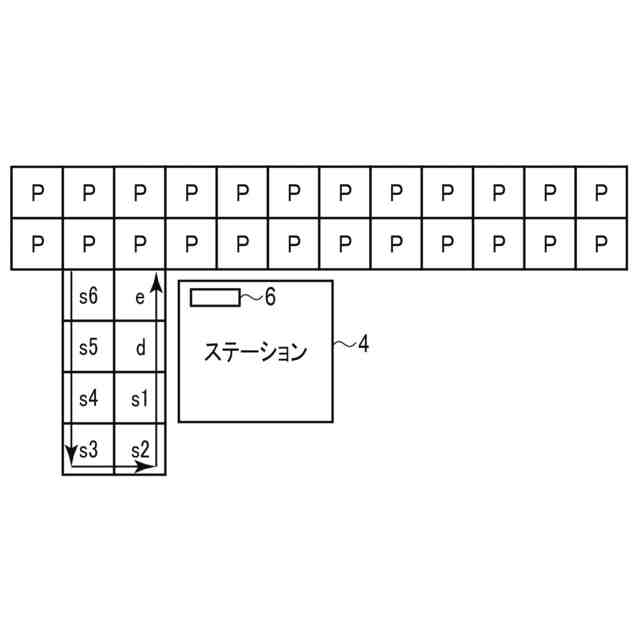
図1は、実施形態に係る物流システムが適用される作業空間の構成例を示す図である。
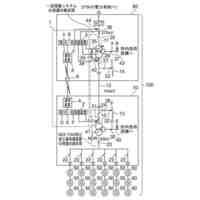
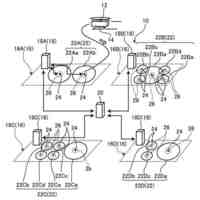
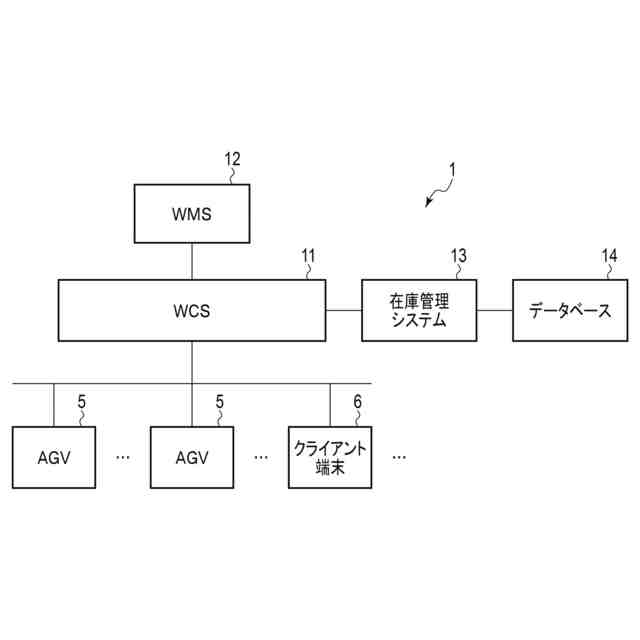
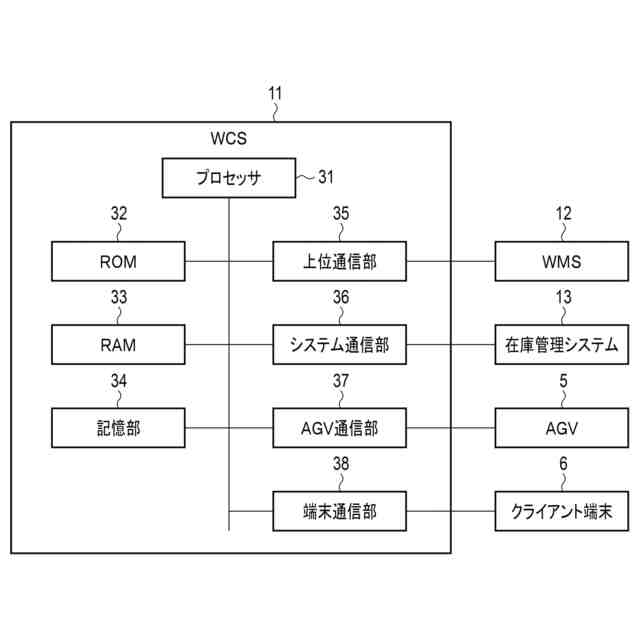
図2は、実施形態に係る制御装置としてのWCSを含む物流システム全体の構成例を示すブロック図である。
図3は、実施形態に係る制御装置としてのWCSの構成例を示すブロック図である。
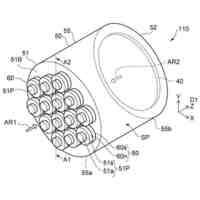
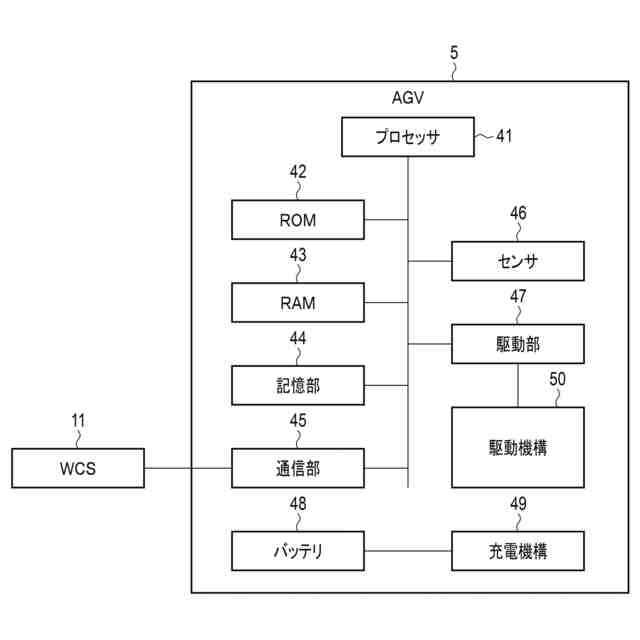
図4は、実施形態に係る物流システムにおける自動搬送車(AGV)の構成例を示すブロック図である。
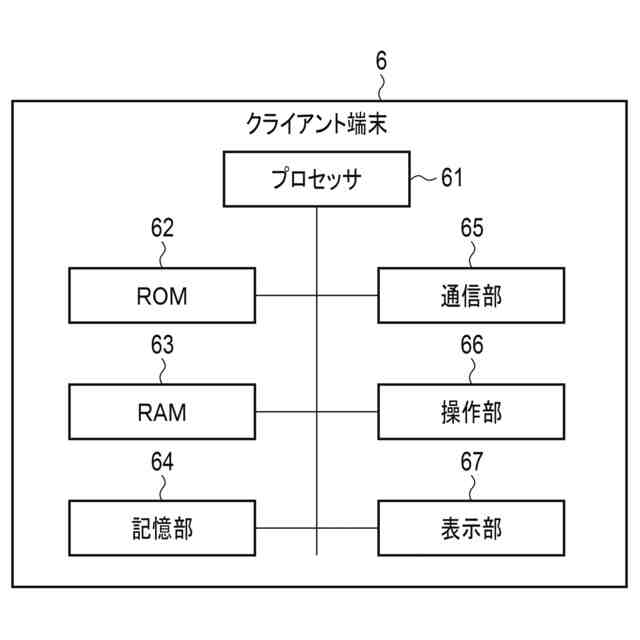
図5は、実施形態に係る物流システムにおけるクライアント端末の構成例を示すブロック図である。
図6は、実施形態に係る物流システムが運用される作業空間内におけるステーション周辺の構成例を説明するための図である。
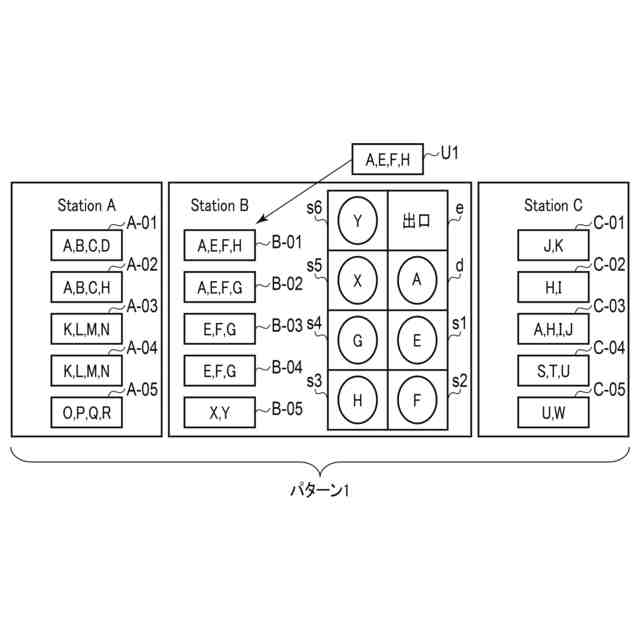
図7は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第1パターンを説明するための図である。
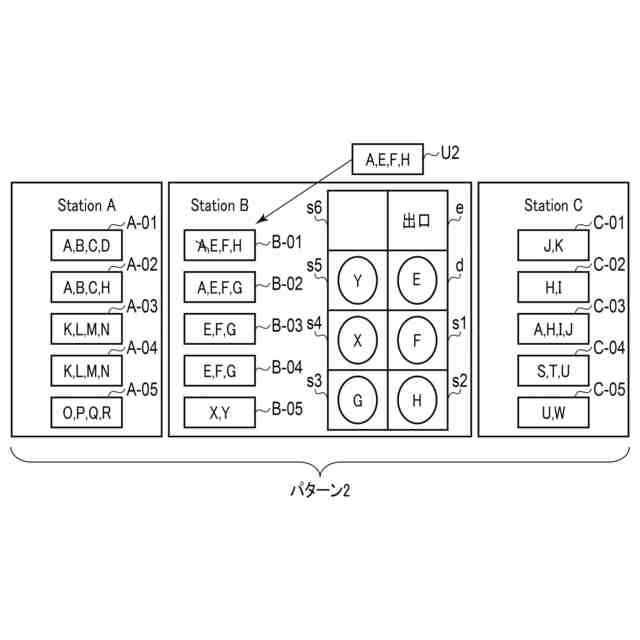
図8は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第2パターンを説明するための図である。
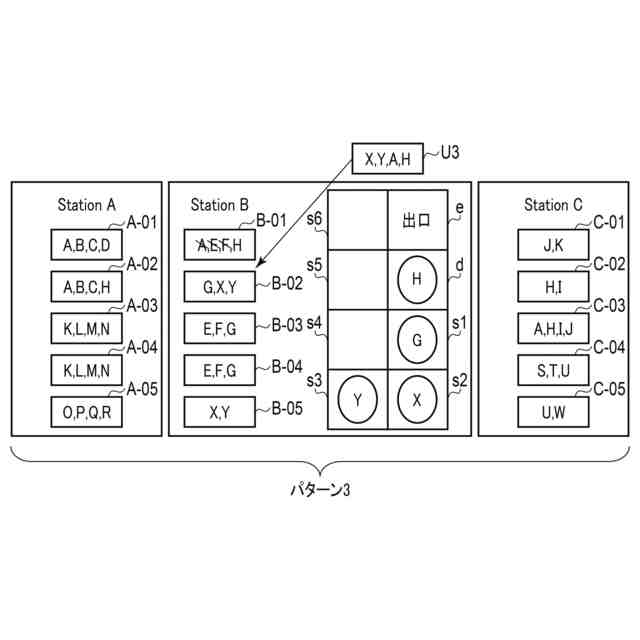
図9は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第3パターンを説明するための図である。
図10は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第4パターンを説明するための図である。
図11は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第5パターンを説明するための図である。
図12は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第6パターンを説明するための図である。
図13は、実施形態に係る制御装置としてのWCSが緊急オーダをステーションに割り当てる第7パターンを説明するための図である。
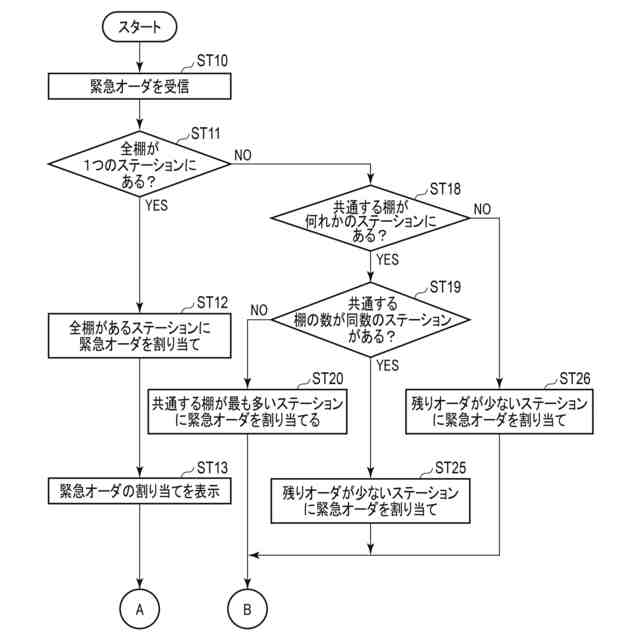
図14は、実施形態に係る制御装置としてのWCSによる緊急オーダの割り当て処理を説明するためのフローチャートである。
図15は、実施形態に係る制御装置としてのWCSによる緊急オーダの割り当て処理を説明するためのフローチャートである。
図16は、実施形態に係る物流システムにおけるクライアント端末の表示例を示す図である。
図17は、実施形態に係る物流システムにおけるクライアント端末の表示例を示す図である。
図18は、実施形態に係る物流システムにおけるクライアント端末の表示例を示す図である。
【発明を実施するための形態】
【0008】
以下、図面を参照して実施形態について説明する。
実施形態に係る物流システムは、自動搬送装置(自動搬送ロボット)としての自動搬送車(以下、AGVと称する)を用いて棚を仕分け作業の作業場であるステーションに搬送し、ステーションにおいて作業員又はロボットがAGVによって搬送されてきた棚から物品をピッキングする作業を行う。
【0009】
例えば、実施形態に係る物流システムは、物流センタ又は倉庫などで用いられる。物流システムは、出荷オーダ(以下、単にオーダと称する)から構成されるオーダリストを取得する。物流システムは、オーダリストの各オーダを作業場であるステーションに割り当てて、各作業場で個々のオーダに従って物品をピッキングする作業を実施する。本実施形態において、緊急で処理すべきオーダを緊急オーダと称し、緊急オーダ以外のオーダを通常オーダとも称するものとする。
【0010】
図1は、実施形態に係る物流システム1が適用される倉庫などの作業空間の構成例を示す図である。また、図2は、実施形態に係る制御装置としてのWCS11を含む物流システム1全体の構成例を示すブロック図である。
図2に示す物流システム1は、図1に示すように、棚3、ステーション4、AGV5およびクライアント端末6などが配置された倉庫などの作業空間における作業に用いられる。
ステーション(第1乃至第3のステーション)4は、物品の仕分け作業を実施する場所(仕分け作業場)である。ステーション4には、オーダに応じた棚(POD、搬送棚)3がAGV5によって搬送される。ステーション4には、作業員が視認可能な表示装置を備えるクライアント端末(入出力装置)6が配置される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電源回路
3日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
3日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
9日前
株式会社東芝
半導体装置
16日前
株式会社東芝
半導体装置
9日前
株式会社東芝
ディスク装置
16日前
株式会社東芝
空調制御装置
9日前
株式会社東芝
モータ駆動装置
3日前
株式会社東芝
原子炉用制御棒
9日前
株式会社東芝
電力変換システム
2日前
株式会社東芝
一括保護システム
9日前
株式会社東芝
半導体モジュール
13日前
株式会社東芝
組電池及び電池盤
9日前
株式会社東芝
粒子線照射システム
13日前
株式会社東芝
植物栽培装置及び方法
13日前
株式会社東芝
変換回路及び通信装置
13日前
株式会社東芝
拾得機能付き調査器具
2日前
株式会社東芝
車両用蓄電池の冷却装置
2日前
株式会社東芝
無人航空機駐機システム
3日前
株式会社東芝
リモートステーション装置
16日前
株式会社東芝
診断システム及び診断方法
16日前
株式会社東芝
サセプタおよび気相成長装置
3日前
株式会社東芝
半導体装置及びその製造方法
9日前
株式会社東芝
プラズマ源及びスイッチ装置
13日前
株式会社東芝
発電システムおよび発電方法
17日前
株式会社東芝
紙葉類処理装置および補正方法
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ