TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024174581
公報種別
公開特許公報(A)
公開日
2024-12-17
出願番号
2023092477
出願日
2023-06-05
発明の名称
最適化演算方法
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05B
13/02 20060101AFI20241210BHJP(制御;調整)
要約
【課題】演算負荷が高い場合であっても制御精度を向上させることができる最適化演算方法を提供すること。
【解決手段】本発明の最適化演算方法は、演算負荷が所定値よりも低い場合には、リアルタイムで非線形演算を用いてプラントの制御量を決定し、演算負荷が所定値よりも高い場合には、過去に非線形演算した演算結果を利用してプラントの制御量を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
演算負荷が所定値よりも低い場合には、リアルタイムで非線形演算を用いてプラントの制御量を決定し、
演算負荷が前記所定値よりも高い場合には、過去に非線形演算した演算結果を利用して前記プラントの制御量を決定する、
ことを特徴とする最適化演算方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、最適化演算方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、特定のパラメータに閾値を設け、パラメータが前記閾値に対して一定の方向にあるときに非線形最適化制御を実行し、演算負荷を低減する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2010-155528号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示された技術では、演算負荷を下げるために、パラメータが一定値を超えていないときにマップ引きなどの演算が軽い計算をして制御することになるため、そのときにあった最適な解を探索できないため、解の精度が落ちてしまう。そのため、非線形最適化制御が実行されていない間は、制御精度が落ちてしまう。
【0005】
本発明は、上記課題に鑑みてなされたものであって、その目的は、演算負荷が高い場合であっても制御精度を向上させることができる最適化演算方法を提供することである。
【課題を解決するための手段】
【0006】
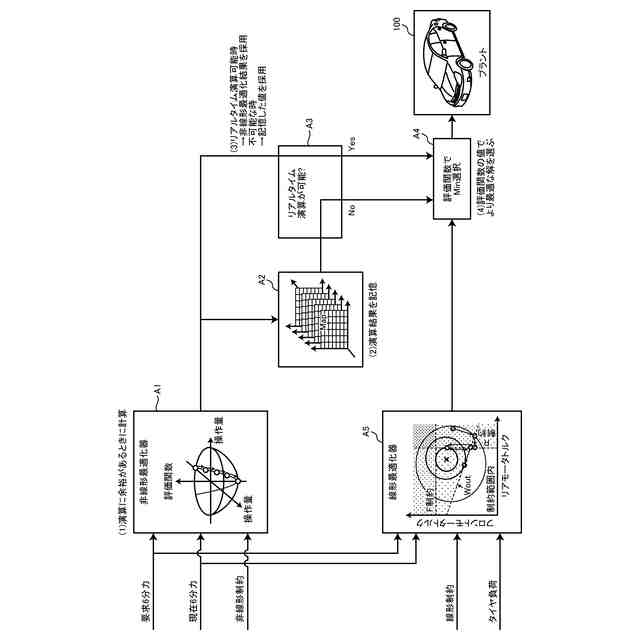
上述した課題を解決し、目的を達成するために、本発明に係る最適化演算方法は、演算負荷が所定値よりも低い場合には、リアルタイムで非線形演算を用いてプラントの制御量を決定し、演算負荷が前記所定値よりも高い場合には、過去に非線形演算した演算結果を利用して前記プラントの制御量を決定する、ことを特徴とするものである。
【発明の効果】
【0007】
本発明に係る最適化演算方法は、演算負荷が高い場合であっても非線形演算結果を用いてプラントを制御することが可能であるため、制御精度を向上させることができるという効果を奏する。
【図面の簡単な説明】
【0008】
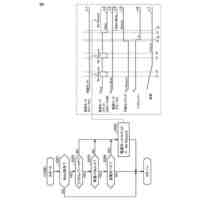
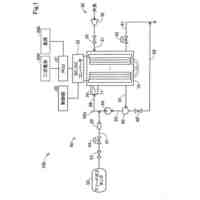
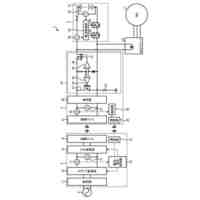
図1は、実施形態に係る最適化演算方法を、演算装置を1つのみ有している場合に適用したときの一例を示した図である。
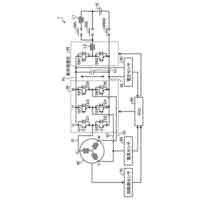
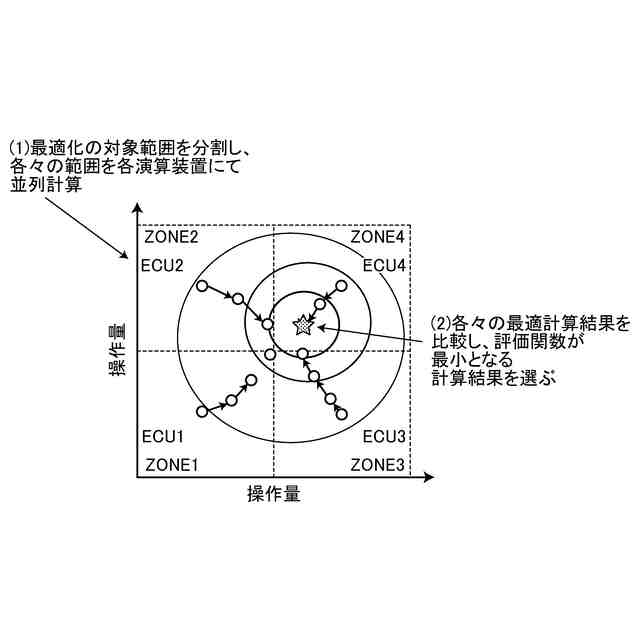
図2は、演算装置を複数有する場合に最適化の対象範囲を分割した図である。
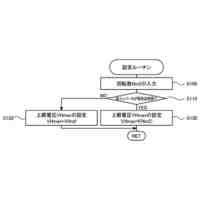
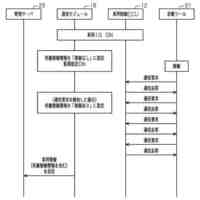
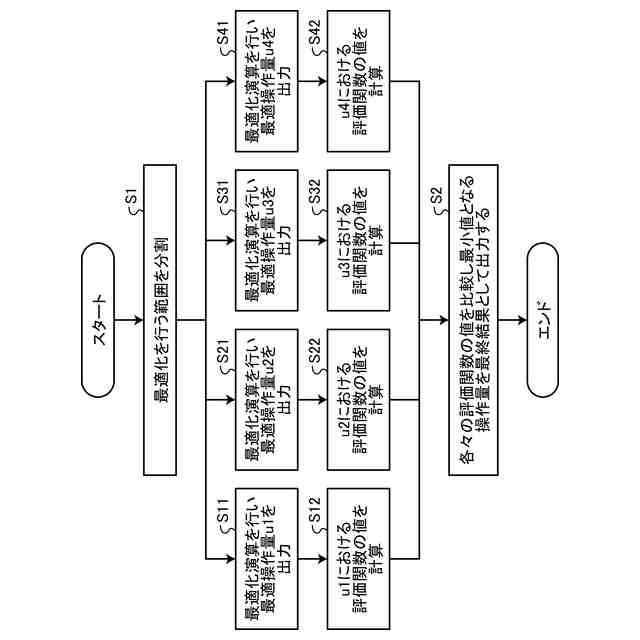
図3は、非線形最適化演算を複数の演算装置で並列計算させる演算制御の一例を示したフローチャートである。
【発明を実施するための形態】
【0009】
以下に、本発明に係る最適化演算方法の実施形態について説明する。なお、本実施形態により本発明が限定されるものではない。
【0010】
実施形態に係る最適化演算方法は、繰り返し計算と配列計算とが伴う最適化計算の演算負荷低減を目的として、車両に設けられた1つ以上の演算装置やクラウドなどの外部演算装置を活用して演算負荷を低減する。実施形態に係る最適化演算方法では、最適化制御の解の精度を落とさずに、演算負荷の低減を行う。特に、非線形最適化問題を用いている制御で有効である。実施形態に係る最適化演算方法は、演算装置を複数有している場合と、演算装置を1つのみ有している場合とで実施形態が異なるが、処理が重い演算を分散させる観点では共通している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
1か月前
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
電池
27日前
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
配管
22日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車体
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
車両
22日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
タンク
6日前
トヨタ自動車株式会社
ロータ
22日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
電動車
22日前
トヨタ自動車株式会社
蓄電池
1か月前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
受電装置
今日
トヨタ自動車株式会社
鋳造装置
1か月前
トヨタ自動車株式会社
電動車両
1か月前
トヨタ自動車株式会社
制御装置
22日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
推定装置
1か月前
トヨタ自動車株式会社
制御装置
22日前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
エンジン
22日前
トヨタ自動車株式会社
車載装置
1日前
トヨタ自動車株式会社
路側装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ