TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024169960
公報種別
公開特許公報(A)
公開日
2024-12-06
出願番号
2023086841
出願日
2023-05-26
発明の名称
馬の走行状態判定方法及び走行状態判定プログラム、並びに歩数取得方法及び歩数取得プログラム
出願人
富士通株式会社
,
個人
代理人
弁理士法人片山特許事務所
主分類
G06Q
50/34 20120101AFI20241129BHJP(計算;計数)
要約
【課題】馬の位置データから馬の走行状態を判定する。
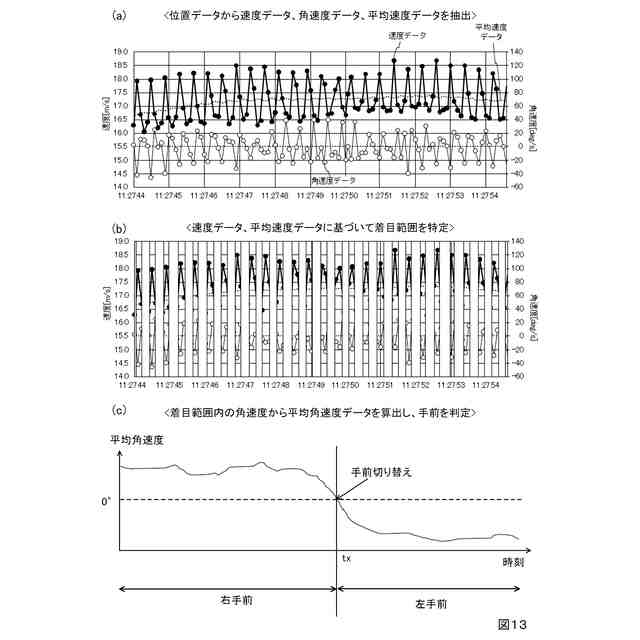
【解決手段】馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻を含む位置データを取得し、前記位置データに基づいて、前記馬の速度を示す速度データと、前記馬の角速度を示す角速度データとを抽出し(図13(a))、各時刻を含む所定時間の平均速度を算出し(図13(a))、前記速度データが前記平均速度を上回る時間帯又は下回る時間帯の前記角速度データに基づいて、前記馬の走行状態が右手前であるか左手前であるかを判定する(図13(b)、図13(c))。
【選択図】図13
特許請求の範囲
【請求項1】
馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻を含む位置データを取得し、
前記位置データに基づいて、前記馬の速度を示す速度データと、前記馬の角速度を示す角速度データとを抽出し、
各時刻を含む所定時間の平均速度を算出し、
前記速度データが前記平均速度を上回る時間帯又は下回る時間帯の前記角速度データに基づいて、前記馬の走行状態が右手前であるか左手前であるかを判定する、
処理をコンピュータが実行することを特徴とする馬の走行状態判定方法。
続きを表示(約 1,500 文字)
【請求項2】
前記判定する処理において、前記速度データが前記平均速度を上回る時間帯を特定し、特定した時間帯の前記角速度データが前記馬の進行方向に対して右向きの方向を示している場合に、前記馬が右手前で走行していると判定し、特定した時間帯の前記角速度データが前記馬の進行方向に対して左向きの方向を示している場合に、前記馬が左手前で走行していると判定する、
ことを特徴とする請求項1に記載の馬の走行状態判定方法。
【請求項3】
前記判定する処理において、前記速度データが前記平均速度を下回る時間帯を特定し、特定した時間帯の前記角速度データが前記馬の進行方向に対して右向きの方向を示している場合に、前記馬が左手前で走行していると判定し、特定した時間帯の前記角速度データが前記馬の進行方向に対して左向きの方向を示している場合に、前記馬が右手前で走行していると判定する、
ことを特徴とする請求項1に記載の馬の走行状態判定方法。
【請求項4】
前記判定する処理の判定結果に基づいて、前記馬が走行状態を右手前から左手前に切り替えたとき又は左手前から右手前に切り替えたときの、時刻情報及び前記馬の位置情報の少なくとも一方を出力する、処理を前記コンピュータが実行することを特徴とする請求項1~3のいずれか一項に記載の走行状態判定方法。
【請求項5】
馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻を含む位置データを取得し、
前記位置データに基づいて、前記馬の速度を示す速度データを抽出し、
前記速度データにおいて繰り返し出現する特徴を抽出し、
前記特徴の抽出数を前記馬の歩数とする、
処理をコンピュータが実行することを特徴とする馬の歩数取得方法。
【請求項6】
前記速度データを用いて、各時刻を含む所定時間の平均速度を算出する処理を前記コンピュータが実行し、
前記繰り返し出現する特徴は、前記速度が前記平均速度よりも小さい状態から大きい状態になること、前記速度が前記平均速度よりも大きい状態から小さい状態になること、のいずれか一方である、ことを特徴とする請求項5に記載の馬の歩数取得方法。
【請求項7】
前記繰り返し出現する特徴は、前記馬の速度が上昇した後に下降すること、前記馬の速度が下降した後に上昇すること、のいずれか一方である、ことを特徴とする請求項5に記載の馬の歩数取得方法。
【請求項8】
馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻を含む位置データを取得し、
前記位置データに基づいて、前記馬の速度を示す速度データと、前記馬の角速度を示す角速度データとを抽出し、
各時刻を含む所定時間の平均速度を算出し、
前記速度データが前記平均速度を上回る時間帯又は下回る時間帯の前記角速度データに基づいて、前記馬の走行状態が右手前であるか左手前であるかを判定する、
処理をコンピュータに実行させることを特徴とする馬の走行状態判定プログラム。
【請求項9】
馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻とを含む位置データを取得し、
前記位置データに基づいて、前記馬の速度を示す速度データを抽出し、
前記速度データにおいて繰り返し出現する特徴を抽出し、
前記特徴の抽出数を前記馬の歩数とする、
処理をコンピュータに実行させることを特徴とする馬の歩数取得プログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、馬の走行状態判定方法及び走行状態判定プログラム、並びに歩数取得方法及び歩数取得プログラムに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
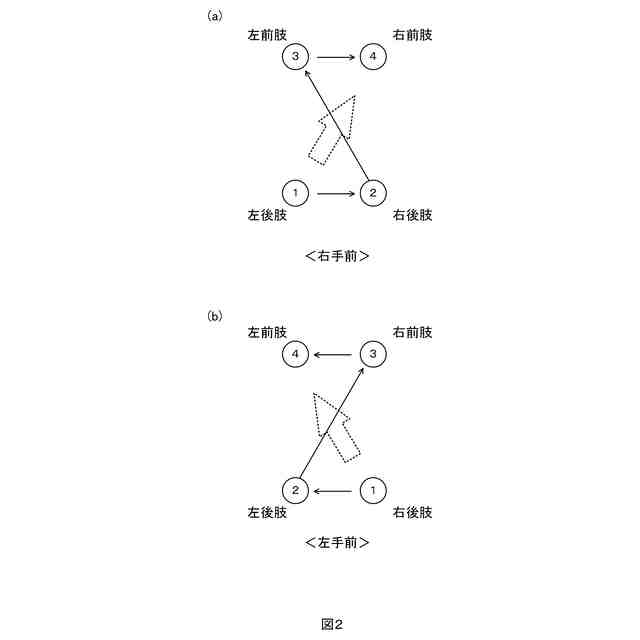
馬の走り方(走行状態)を表現する方法として、「手前」という表現が用いられることがある。馬は左右の肢の動きが非対称であり、右前肢よりも左前肢を前に出す場合が「左手前」、その逆が「右手前」とされている。
【0003】
一般的に、競馬においては、コーナーを回る際に遠心力で外側にふくれてしまうのを防ぐため、右回りのコースでは右手前、左回りのコースでは左手前で走るのが良いとされている。また、直線では、走りやすい手前に替えるのが良いとされている。
【0004】
従来、馬の手前を判断する方法としては、映像で確認する方法が知られている。また、馬の前両肢の間に携帯端末を装着し、携帯端末を用いて検出した上下方向の振動と、上下方向の軸周りの角速度に基づいて手前を判定する方法が知られている(例えば特許文献1等参照)。
【先行技術文献】
【特許文献】
【0005】
特開2015-84943号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、映像から馬の手前を把握する場合、作業者は馬の映像をコマ送りするなどして着目すべき馬を目で追っていく必要があるため、手間がかかる。また、映像では複数の馬が重なることもあるため、正確に手前を把握できないおそれもある。また、特許文献1の場合、加速度センサや角速度センサなど複数種類のセンサが必要となり、装置構成が複雑になるおそれがある。
【0007】
1つの側面では、本発明は、馬の位置データから馬の走行状態を判定することが可能な馬の走行状態判定方法及び走行状態判定プログラムを提供することを目的とする。また、別の側面では、本発明は、馬の位置データから馬の歩数を取得することが可能な馬の歩数取得方法及び歩数取得プログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
一つの態様では、馬の走行状態判定方法は、馬に装着され前記馬の位置情報を検出する位置検出装置から、前記位置情報と前記位置情報の検出時刻を含む位置データを取得し、前記位置データに基づいて、前記馬の速度を示す速度データと、前記馬の角速度を示す角速度データとを抽出し、各時刻を含む所定時間の平均速度を算出し、前記速度データが前記平均速度を上回る時間帯又は下回る時間帯の前記角速度データに基づいて、前記馬の走行状態が右手前であるか左手前であるかを判定する、処理をコンピュータが実行するものである。
【発明の効果】
【0009】
馬の位置データから馬の走行状態や馬の歩数を得ることができる。
【図面の簡単な説明】
【0010】
図1(a)は、競走馬が「右手前」で走っている状態を模式的に示す図であり、図1(b)は、競走馬が「左手前」で走っている状態を模式的に示す図である。
図2(a)は、「右手前」の場合において肢が地面につく順番を示す図であり、図2(b)は、「左手前」の場合において肢が地面につく順番を示す図である。
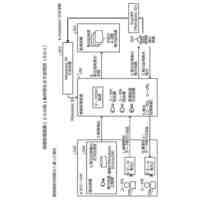
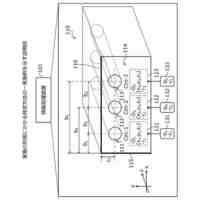
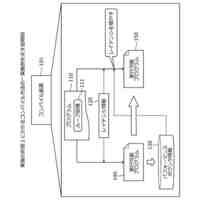
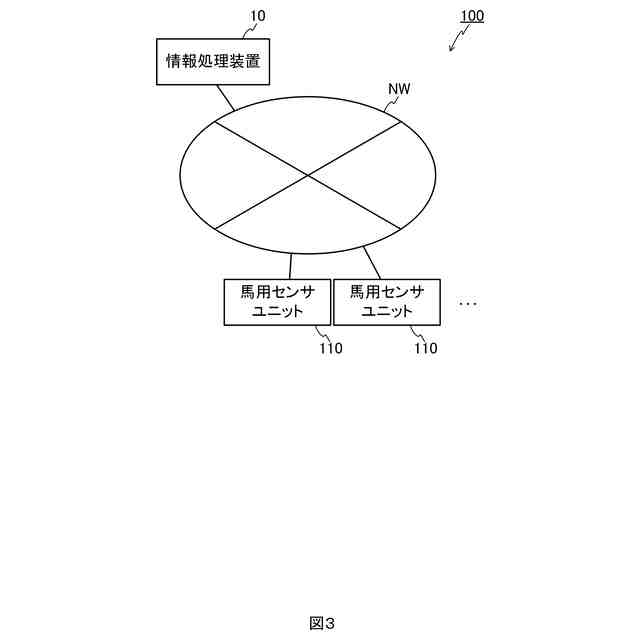
第1の実施形態に係る情報処理システムの構成を概略的に示す図である。
図4(a)は、情報処理装置のハードウェア構成を示す図であり、図4(b)は、馬用センサユニットのハードウェア構成を示す図である。
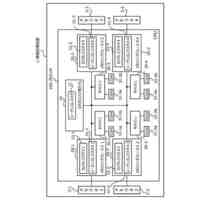
第1の実施形態に係る情報処理装置の機能ブロック図である。
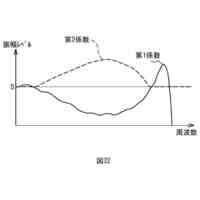
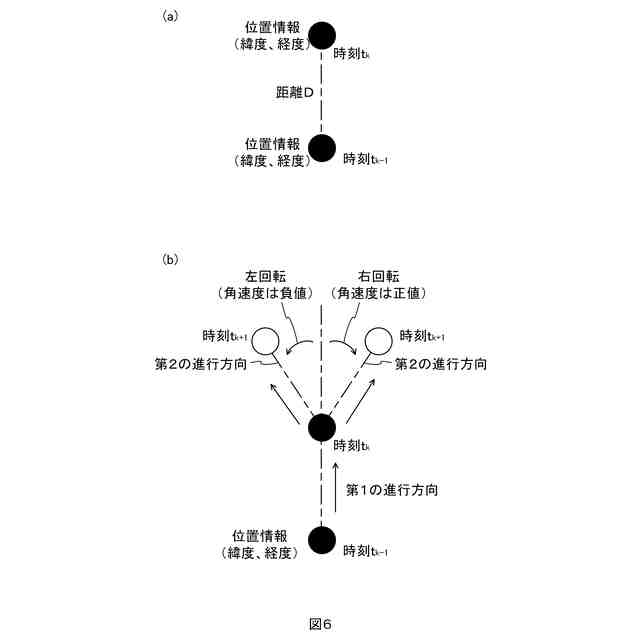
図6(a)は、位置データから速度データを抽出する方法について説明するための図であり、図6(b)は、位置データから角速度データを抽出する方法について説明するための図である。
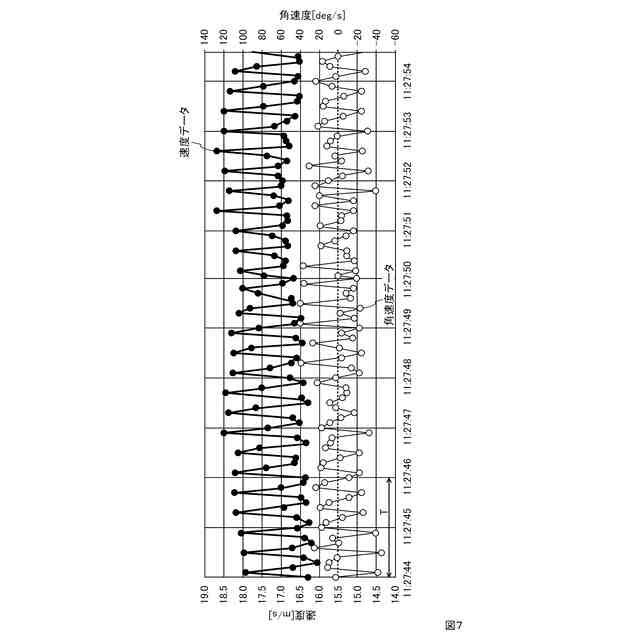
位置データから得られた速度データと角速度データの一例を示す図である。
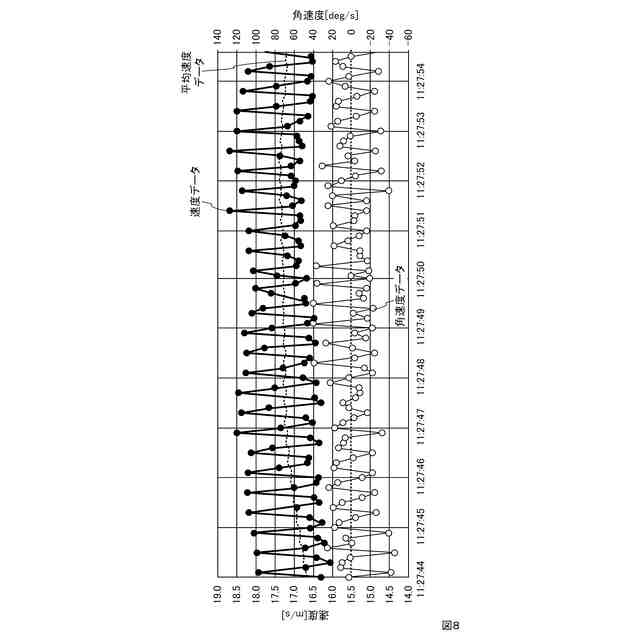
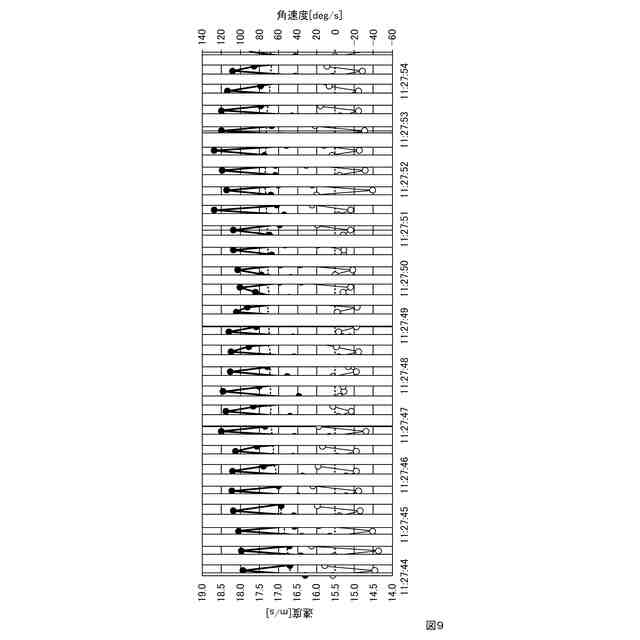
速度データと角速度データとともに、平均速度データを示す図である。
着目範囲を示す図である。
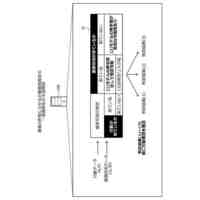
図10(a)は、平均角速度データの一例を示す図であり、図10(b)は、図10(a)から右手前、左手前、手前の切り替えを判定する方法について説明するための図である。
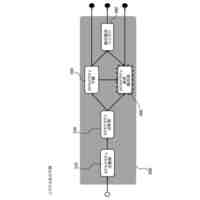
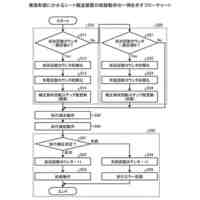
情報処理装置の処理を示すフローチャートである。
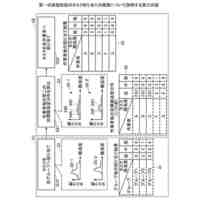
手前の切り替えのタイミングを映像で確認した結果と、第1の実施形態の方法で分析した結果と、両結果の誤差を示す表である。
図13(a)~図13(c)は、第1の実施形態の概要を示す図である。
第1の実施形態の変形例について説明するための図(その1)である。
図15(a)、図15(b)は、第1の実施形態の変形例について説明するための図(その2)である。
第2の実施形態に係る情報処理装置の機能ブロック図である。
第2の実施形態の速度データと平均速度データとを示す図である。
第2の実施形態における歩数のカウント方法について説明するための図である。
第2の実施形態の変形例(その1)における歩数のカウント方法について説明するための図である。
第2の実施形態の変形例(その2)における歩数のカウント方法について説明するための図である。
第2の実施形態の変形例(その3)における歩数のカウント方法について説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
富士通株式会社
排出の推定と異常
今日
富士通株式会社
排出の推定と異常
今日
富士通株式会社
情報処理プログラム
9日前
富士通株式会社
プロセッサパッケージ
1か月前
富士通株式会社
光伝送装置及び光伝送方法
14日前
富士通株式会社
プロセッサ及び情報処理装置
28日前
富士通株式会社
光伝送装置および光伝送システム
21日前
富士通株式会社
故障監視装置および故障監視方法
21日前
富士通株式会社
エラー訂正装置及びエラー訂正方法
15日前
富士通株式会社
機械学習プログラム、方法、及び装置
9日前
富士通株式会社
ラマン増幅装置およびラマン増幅方法
14日前
富士通株式会社
光送受信機制御方法および光送受信機
20日前
富士通株式会社
情報処理方法および情報処理プログラム
14日前
富士通株式会社
OD決定方法およびOD決定プログラム
20日前
富士通株式会社
データ生成プログラム、方法、及び装置
9日前
富士通株式会社
収入特定方法および収入特定プログラム
27日前
富士通株式会社
キャッシュコントローラ及び演算処理装置
8日前
富士通株式会社
制御プログラム、制御装置、及び制御方法
7日前
富士通株式会社
評価プログラム、評価装置及び評価システム
1か月前
富士通株式会社
プログラム、情報処理方法および情報処理装置
今日
富士通株式会社
自己教師あり学習プログラム、方法、及び装置
21日前
富士通株式会社
位置情報処理装置およびサービス提供システム
28日前
富士通株式会社
車両販売支援システム、方法およびプログラム
1日前
富士通株式会社
自己教師あり学習プログラム、方法、及び装置
21日前
富士通株式会社
データ処理装置、プログラム及びデータ処理方法
22日前
富士通株式会社
プログラム、データ処理装置及びデータ処理方法
22日前
富士通株式会社
半導体装置、半導体装置の製造方法及び電子装置
9日前
富士通株式会社
情報処理システム、情報処理方法及びプログラム
29日前
富士通株式会社
シート搬送制御プログラムおよびシート搬送装置
今日
富士通株式会社
半導体装置、半導体装置の製造方法及び電子装置
7日前
富士通株式会社
特定プログラム、特定方法、および情報処理装置
7日前
富士通株式会社
タスク割り当て方法、タスク割り当てプログラム
28日前
富士通株式会社
行動要因推定方法および行動要因推定プログラム
8日前
富士通株式会社
光送受信システム、光送受信方法、及び光送信装置
今日
富士通株式会社
コンパイラ、コンパイル方法、およびコンパイル装置
9日前
富士通株式会社
機械学習プログラム、機械学習方法及び機械学習装置
8日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ