TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024166026
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023173909
出願日
2023-10-05
発明の名称
車両用制御装置及び車両用制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
G01C
21/34 20060101AFI20241121BHJP(測定;試験)
要約
【課題】Uターン制御が行なわれる場合の搭乗者の不安を抑制することが可能な車両用制御装置等の提供。
【解決手段】自動運転ECUは、ドライバの運転操作を支援又は代行する走行制御機能を備える自車両において用いられ、車両用制御装置として機能する。自動運転ECUでは、走行制御機能によって用いられる自車両の走行計画が把握される。そして、走行計画にてUターン制御の実施が予定されている場合、経路案内の報知が、Uターン制御の実施が予定されていない場合とは異なる態様で実施される。
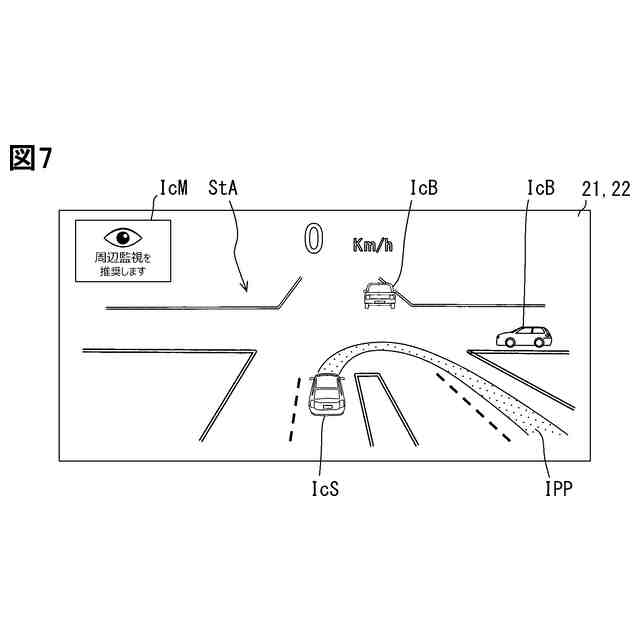
【選択図】図7
特許請求の範囲
【請求項1】
ドライバの運転操作を支援又は代行する走行制御機能を備える自車両(Am)において用いられる車両用制御装置であって、
前記走行制御機能によって用いられる前記自車両の走行計画を把握する計画把握部(77,82)と、
前記走行計画にてUターン制御の実施が予定されている場合の経路案内の報知を、前記Uターン制御の実施が予定されていない場合とは異なる態様で実施する報知実施部(72,88)と、
を備える車両用制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記報知実施部は、前記Uターン制御の実施が予定されている場合の前記経路案内の報知を、前記Uターン制御の実施が予定されていない場合の前記経路案内の報知よりも強調した態様で実施する請求項1に記載の車両用制御装置。
【請求項3】
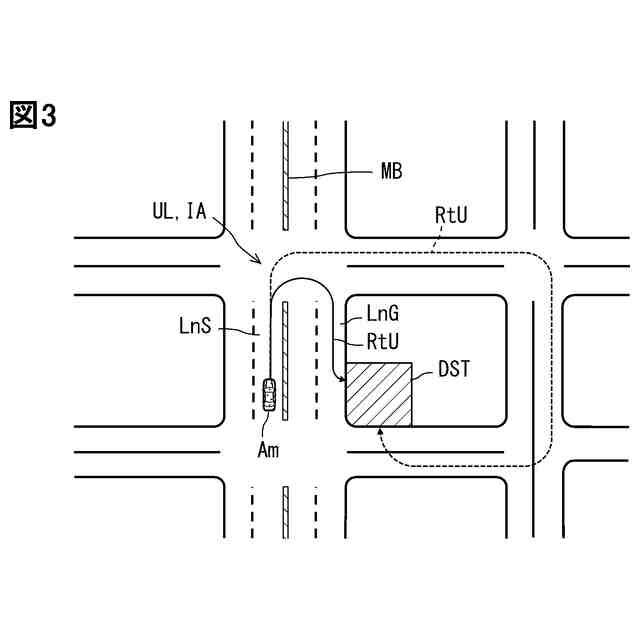
前記計画把握部は、前記Uターン制御の実施が予定されているUターン予定場所(UL)が交差点(IA)であるか否かを把握し、
前記Uターン制御を実施する制御実施部(63)、をさらに備え、
前記制御実施部は、前記Uターン予定場所が前記交差点であるか否かに応じて、前記Uターン制御の内容を変更する請求項1に記載の車両用制御装置。
【請求項4】
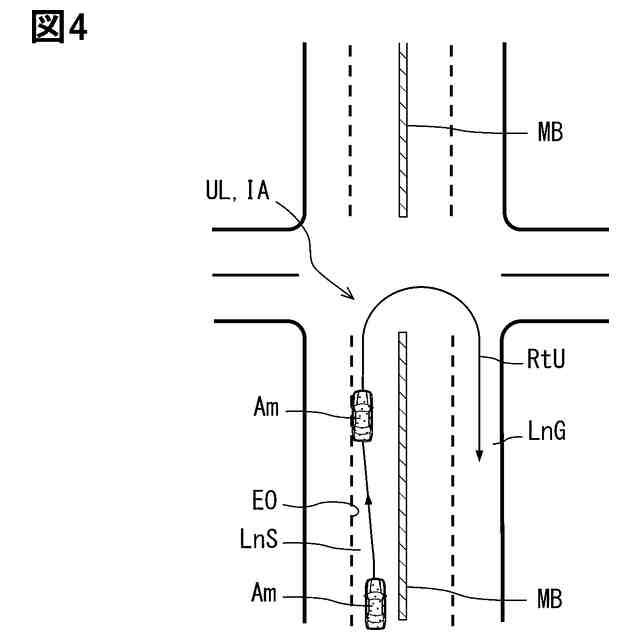
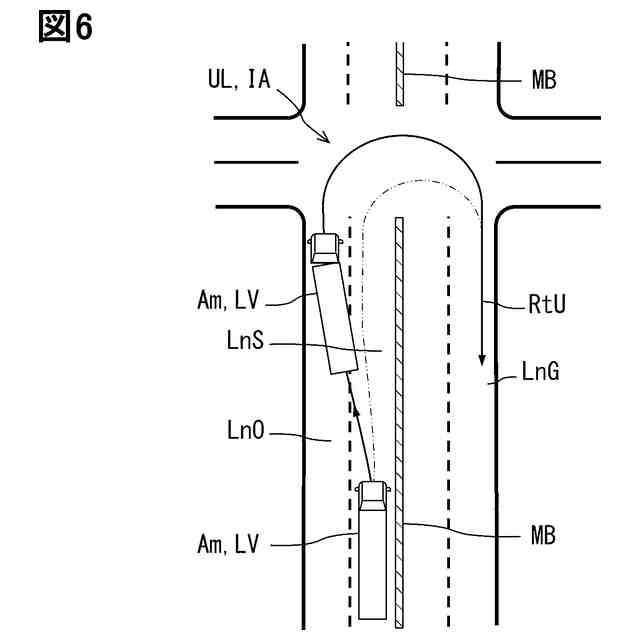
前記制御実施部は、ターン元車線(LnS)からターン先車線(LnG)への前記Uターン制御を実施する場合、前記ターン元車線のうちで前記ターン先車線から遠い側に位置する外側端(EO)に前記自車両を寄せる請求項3に記載の車両用制御装置。
【請求項5】
前記制御実施部は、前記Uターン予定場所が前記交差点である場合、前記Uターン予定場所が前記交差点でない場合よりも、前記外側端に前記自車両を近づける請求項4に記載の車両用制御装置。
【請求項6】
前記報知実施部は、前記Uターン制御にて前記自車両の一時停止が行われる場合と、前記一時停止が行われない場合とで、前記経路案内の報知の態様を変更する請求項1に記載の車両用制御装置。
【請求項7】
前記報知実施部は、前記Uターン制御にて前記一時停止が行われる場合よりも、前記一時停止が行われない場合の前記経路案内の報知を強調する請求項6に記載の車両用制御装置。
【請求項8】
前記報知実施部は、前記Uターン制御にて前記自車両の切り返しが行なわれる場合と、前記切り返しが行なわれない場合とで、前記経路案内の報知の態様を変更する請求項1に記載の車両用制御装置。
【請求項9】
前記報知実施部は、前記Uターン制御にて前記切り返しが行なわれる場合、前記切り返しが行なわれない場合よりも、自車周囲の広範囲の状況を前記経路案内にて報知する請求項8に記載の車両用制御装置。
【請求項10】
前記Uターン制御を実施する制御実施部(63)、をさらに備え、
前記制御実施部は、前記Uターン制御の開始後における前記自車両の行き詰まりを判定し、当該行き詰まりを判定した地点から前記切り返しを開始する請求項8又は9に記載の車両用制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、ドライバの運転操作を支援又は代行する走行制御機能を備えた自車両において用いられる車両用の制御技術に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
特許文献1には、自動運転車両の経路計画を生成する方法が記載されている。具体的に、特許文献1では、計画された経路に基づく運転シナリオの1つとして、Uターンシナリオが含まれている。
【先行技術文献】
【特許文献】
【0003】
特表2020-523552号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1のようなUターンシナリオに基づき自動運転車両である自車両がUターンを行う場合、Uターン以外の走行制御(例えば、右左折制御等)を行う場合よりも、自車両は、大きく進行方向を変えることになる。その結果、Uターン制御を行う自車両の挙動に対して、搭乗者が不安を感じ易くなり得る。
【0005】
本開示は、Uターン制御が行なわれる場合の搭乗者の不安を抑制することが可能な車両用制御装置、及び車両用制御プログラムの提供を目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、開示された一つの態様は、ドライバの運転操作を支援又は代行する走行制御機能を備える自車両(Am)において用いられる車両用制御装置であって、走行制御機能によって用いられる自車両の走行計画を把握する計画把握部(77,82)と、走行計画にてUターン制御の実施が予定されている場合の経路案内の報知を、Uターン制御の実施が予定されていない場合とは異なる態様で実施する報知実施部(72,88)と、を備える車両用制御装置とされる。
【0007】
また開示された一つの態様は、ドライバの運転操作を支援又は代行する走行制御機能を備える自車両(Am)において用いられる車両用制御プログラムであって、走行制御機能によって用いられる自車両の走行計画を把握し(S61)、走行計画にてUターン制御の実施が予定されている場合の経路案内の報知を、Uターン制御の実施が予定されていない場合とは異なる態様で実施する(S62)、ことを含む処理を、少なくとも一つの処理部(11,51)に実行させる車両用制御プログラムとされる。
【0008】
これらの態様では、走行制御機能によって用いられる走行計画にて、Uターン制御の実施が予定されている場合の経路案内の報知は、Uターン制御の実施が予定されていない場合とは異なる態様とされる。故に、自車両の搭乗者は、通常とは異なる経路案内の報知により、Uターン制御の実施予定を知り得る。その結果、Uターン制御が行なわれる場合の搭乗者の不安を抑制することが可能になる。
【0009】
尚、上記及び特許請求の範囲における括弧内の参照番号は、後述する実施形態における具体的な構成との対応関係の一例を示すものにすぎず、技術的範囲を何ら制限するものではない。また、特に組み合わせに支障が生じなければ、特許請求の範囲において明示していない請求項同士の組み合せも可能である。
【図面の簡単な説明】
【0010】
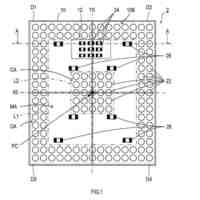
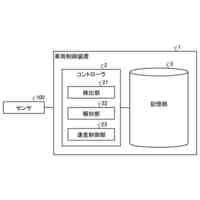
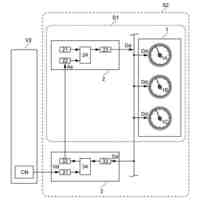
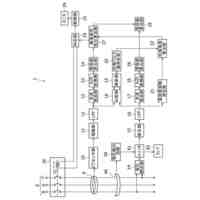
本開示の第一実施形態による自動運転ECU及びHMI制御装置を含む車載ネットワークの全体像を示す図である。
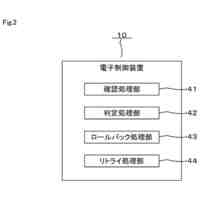
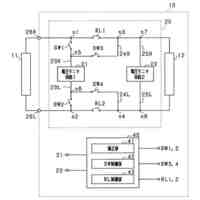
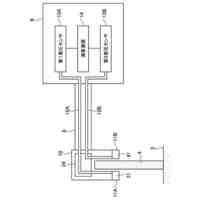
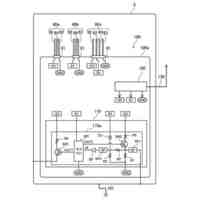
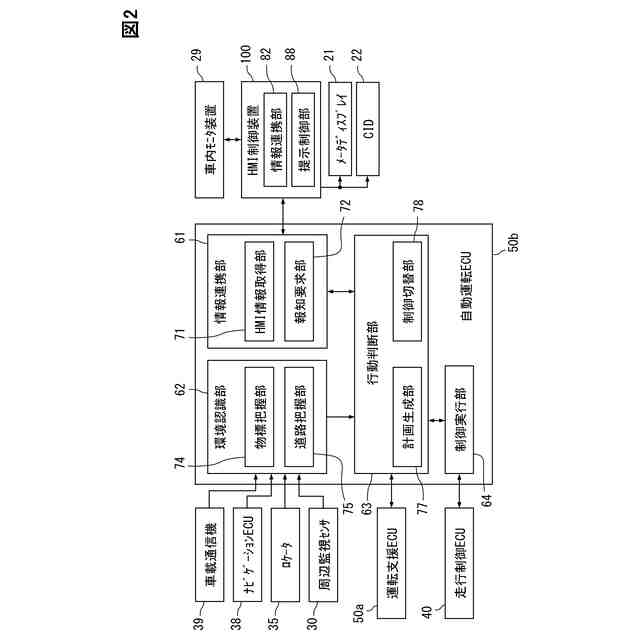
自動運転ECUの詳細を示すブロック図である。
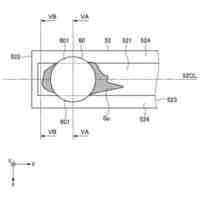
自動運転ECUにて実施されるUターン制御を説明するための図である。
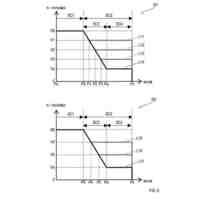
交差点にてUターンを行う場合のオフセット制御を説明するための図である。
接続路にてUターンを行う場合のオフセット制御を説明するための図である。
外側車線へのはみ出しを行う場合のUターン制御を説明するための図である。
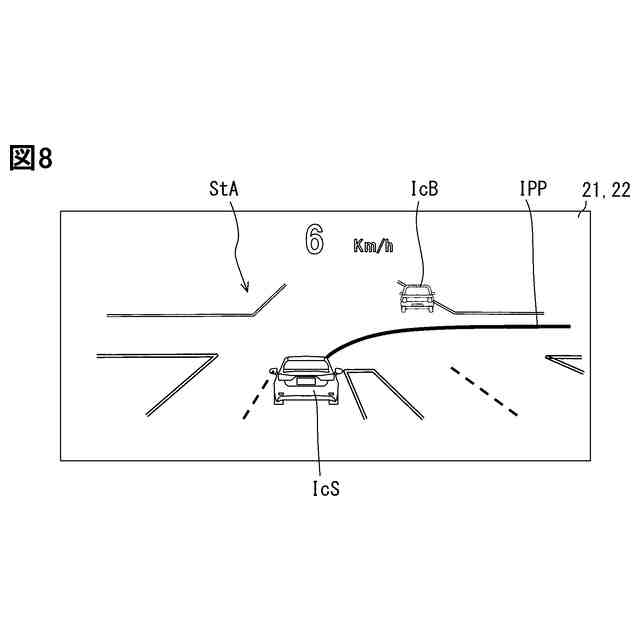
Uターン経路案内を行う自車ステータスを示す図である。
右折経路案内を行う自車ステータスを示す図である。
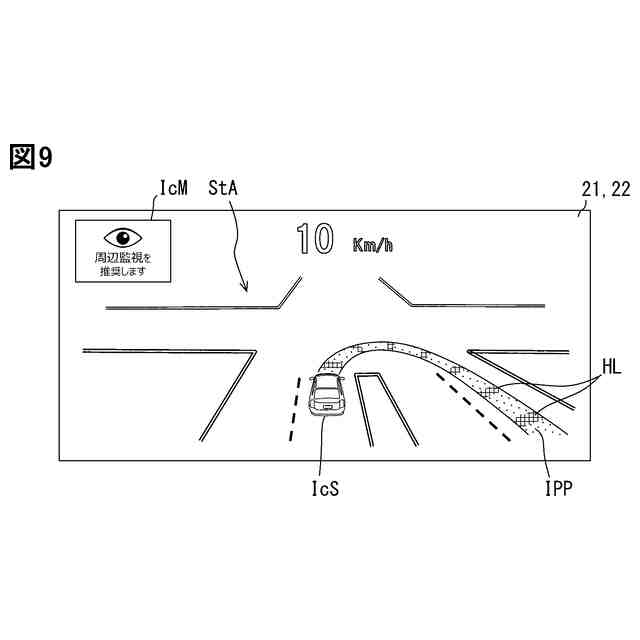
一時停止することなくUターンを行う場合の自車ステータスを示す図である。
切り返しが発生した場合の自車ステータスを示す図である。
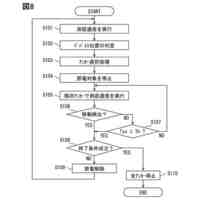
自動運転ECU及びHMI制御装置にて実施される問い合わせ処理の詳細を示すフローチャートである。
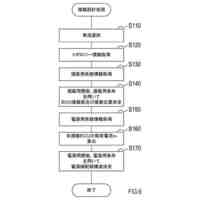
自動運転ECUにて実施される走行計画生成処理の詳細を示すフローチャートである。
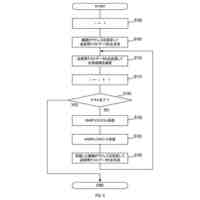
自動運転ECU及びHMI制御装置にて実施されるUターン報知処理の詳細を示すフローチャートである。
自動運転ECUにて実施される切り返し実行処理の詳細を示すフローチャートである。
本開示の第二実施形態による自動運転ECUにて実施される許否判断処理の詳細を示すフローチャートである。
自動運転ECU及びHMI制御装置にて実施される問い合わせ処理の詳細を示すフローチャートである。
自動運転ECUにて実施される走行計画生成処理の詳細を示すフローチャートである。
本開示の第三実施形態による自動運転ECUにて実施される制限解除処理の詳細を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
電子部品
今日
株式会社デンソー
電力変換装置
今日
株式会社デンソー
回路基板装置
今日
株式会社デンソー
電子制御装置
今日
株式会社デンソー
スパークプラグ
今日
株式会社デンソー
モータ制御装置
今日
株式会社デンソー
パワーモジュール
今日
株式会社デンソー
マルチチップモジュール
今日
株式会社デンソー
位置判定装置、位置判定方法
今日
株式会社デンソー
搭載設計装置及び搭載設計方法
今日
株式会社SOKEN
電力変換器
今日
株式会社SOKEN
形状推定装置
今日
株式会社デンソー
リアクトル部品および電力変換装置
今日
株式会社デンソー
車両用制御装置及び車両用制御プログラム
今日
株式会社デンソーテン
車両制御装置、制御方法および制御プログラム
今日
株式会社デンソー
電源システム、電源システムの制御プログラム
今日
株式会社デンソー
車両制御装置、車両制御方法、及び車両制御プログラム
今日
株式会社デンソー
テスト装置、テストシステム、テスト方法及びコンピュータプログラム
今日
個人
地震予測システム
2日前
日本精機株式会社
検出装置
7日前
株式会社小野測器
測定器
8日前
株式会社高橋型精
採尿具
28日前
アルファクス株式会社
積層プローブ
20日前
日本精機株式会社
補助計器システム
22日前
中国電力株式会社
短絡防止具
20日前
キヤノン電子株式会社
サーボ加速度計
20日前
大成建設株式会社
風力測定装置
7日前
キヤノン電子株式会社
サーボ加速度計
今日
株式会社関電工
内径測定装置。
28日前
キヤノン電子株式会社
サーボ加速度計
今日
リンナイ株式会社
電気機器
7日前
株式会社精工技研
光電圧プローブ
7日前
Igr技研株式会社
Igr測定装置
7日前
倉敷紡績株式会社
フィルム測定装置
28日前
ミツミ電機株式会社
流体センサ
28日前
個人
純金を作用電極に用いたORP測定装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ