TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024158206
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023073197
出願日
2023-04-27
発明の名称
駐車支援装置
出願人
株式会社アイシン
代理人
弁理士法人ネクスト
主分類
B60W
30/06 20060101AFI20241031BHJP(車両一般)
要約
【課題】駐車時において追従不可能な走行軌道が生成されることなく、より適切な走行軌道を算出することを可能にした駐車支援装置を提供する。
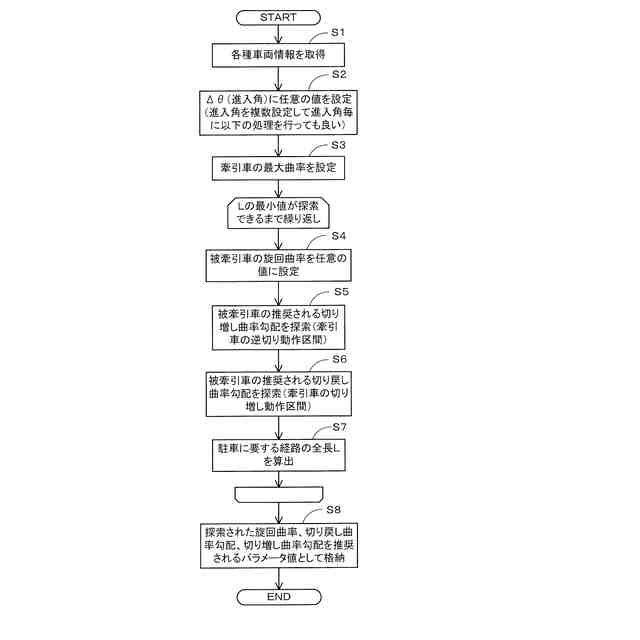
【解決手段】牽引車2の走行軌道について許容する曲率又は舵角の最大値を設定し、被牽引車3の回転中心から連結点までの距離であるトレーラホイールベースと、牽引車2の後輪軸から牽引車2と被牽引車3との連結点までの距離である連結距離と、を取得し、牽引車2の走行軌道の曲率又は舵角が最大値を超えないことを条件とした上でトレーラホイールベースと連結距離とに基づいて、被牽引車3の駐車時の走行軌道における旋回曲率と第2区間の曲率勾配の推奨される値を夫々特定するように構成する。
【選択図】図9
特許請求の範囲
【請求項1】
牽引車と前記牽引車により牽引される対象となる被牽引車とが連結された状態において前記牽引車と前記被牽引車の駐車を支援する駐車支援装置であって、
前記被牽引車の駐車時の走行軌道は、後退開始時点の初期曲率から所定の旋回曲率まで曲率を上昇させつつ後退する第1区間と、前記所定の旋回曲率から曲率を減少させつつ後退する第2区間と、を含み、
前記牽引車の走行軌道について許容する曲率又は舵角の最大値を設定する最大値設定部と、
前記被牽引車の回転中心から前記牽引車と前記被牽引車との連結点までの距離をトレーラホイールベースとして取得するトレーラホイールベース取得部と、
前記牽引車の後輪軸から前記連結点までの距離である連結距離を取得する連結距離取得部と、
前記牽引車の走行軌道の曲率又は舵角が前記最大値を超えないことを条件とした上で前記トレーラホイールベースと前記連結距離とに基づいて、前記被牽引車の駐車時の走行軌道における前記所定の旋回曲率と前記第2区間の曲率勾配の推奨される値を夫々特定するパラメータ特定部と、を有する駐車支援装置。
続きを表示(約 420 文字)
【請求項2】
前記パラメータ特定部は、前記牽引車の走行軌道の曲率又は舵角が前記最大値を超えないことを条件とし、前記トレーラホイールベースと前記連結距離とに基づいて、前記第1区間の曲率勾配の推奨される値を特定する請求項1に記載の駐車支援装置。
【請求項3】
前記パラメータ特定部は、駐車に要する経路の全長が短くなることを優先して前記所定の旋回曲率と前記第1区間の曲率勾配と前記第2区間の曲率勾配の推奨される値を夫々特定する請求項2に記載の駐車支援装置。
【請求項4】
前記最大値設定部は、前記最大値として前記牽引車が前記被牽引車と同方向に旋回する走行軌道において許容する第1最大値と、前記牽引車が前記被牽引車と異なる方向に旋回する走行軌道において許容する第2最大値と、を夫々設定し、
前記第2最大値は前記第1最大値よりも小さい値とする請求項1乃至請求項3のいずれかに記載の駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両の駐車支援を行う駐車支援装置に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
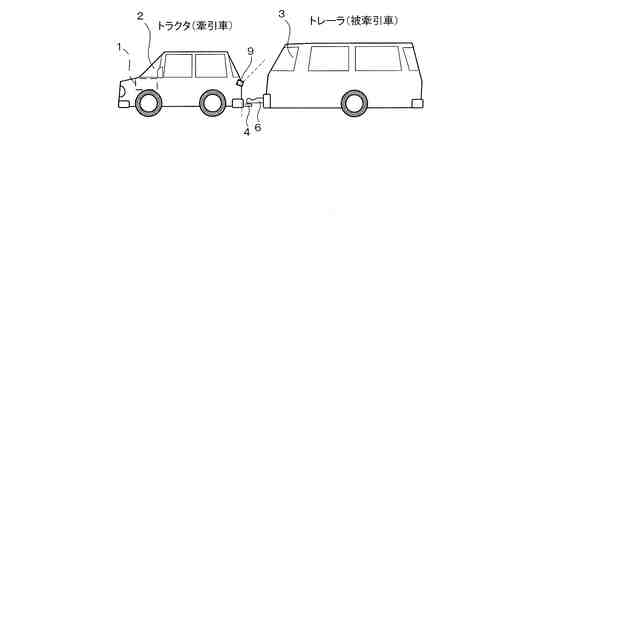
従来より車両の駐車支援として駐車する際の走行軌道を算出して、算出した走行軌道に従って駐車が行われるように案内や車両制御を行うことが知られている。ここで、特に被牽引車(トレーラ)を牽引した牽引車(トラクタ)に対して上記駐車支援を行う際には、牽引車の挙動だけではなく被牽引車の挙動についても考慮して走行軌道を算出する必要があった。
【0003】
例えば特開2022-107175号公報には駐車開始位置と駐車目標位置と障害物の位置から牽引車が被牽引車を牽引した状態で駐車を行う場合の牽引車と被牽引車の目標経路を生成した後に、生成された被牽引車の目標経路の最大曲率が被牽引車の旋回可能な最大曲率以下となっているかを判定し、被牽引車の旋回可能な最大曲率以下となっていない場合には切り返し位置を再設定して目標経路を修正する技術について提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-107175号公報(段落0059-0060)
【発明の概要】
【発明が解決しようとする課題】
【0005】
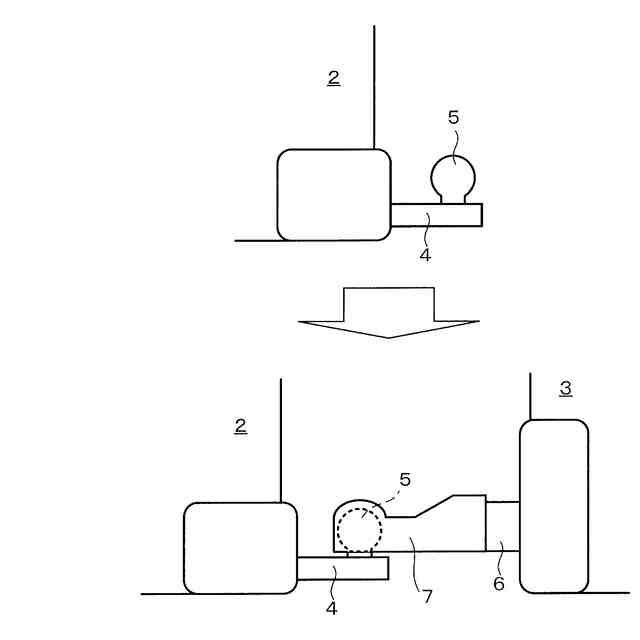
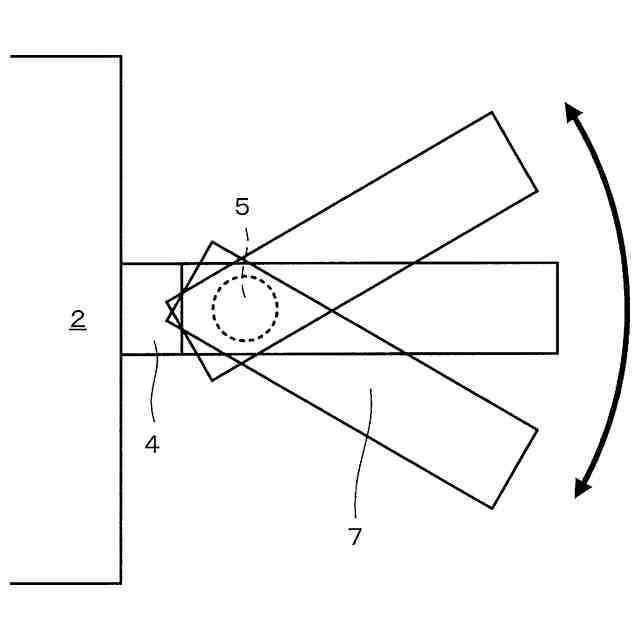
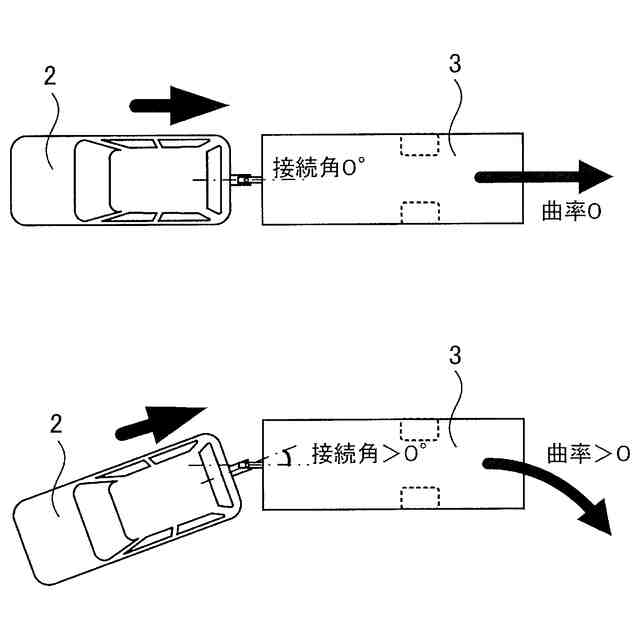
ここで、被牽引車を牽引する牽引車が後退する場合の被牽引車が描く走行軌道の曲率に関して、被牽引車は操舵装置を有さないので、被牽引車の走行軌道の曲率は図7に示すように主に牽引車と被牽引車の接続角度(ヒッチ角)に基づいて決まることとなる。即ち、図7の上図のように牽引車2と被牽引車3の接続角度が0度(一直線上に位置)の時点では後退する牽引車2に押された場合に描く被牽引車3の走行軌道の曲率は0となる。一方、図7の下図のように牽引車2と被牽引車3の接続角度が0度より大きくなれば後退する牽引車2に押された場合に描く被牽引車3の走行軌道の曲率は0より大きくなる。そして、牽引車2と被牽引車3の接続角度が大きくなるほど、被牽引車3の走行軌道の曲率は大きくなる(旋回半径が小さくなる)。
【0006】
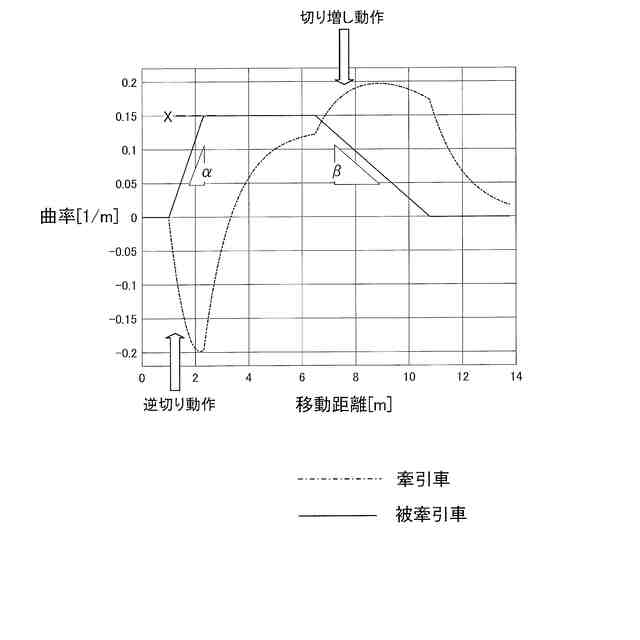
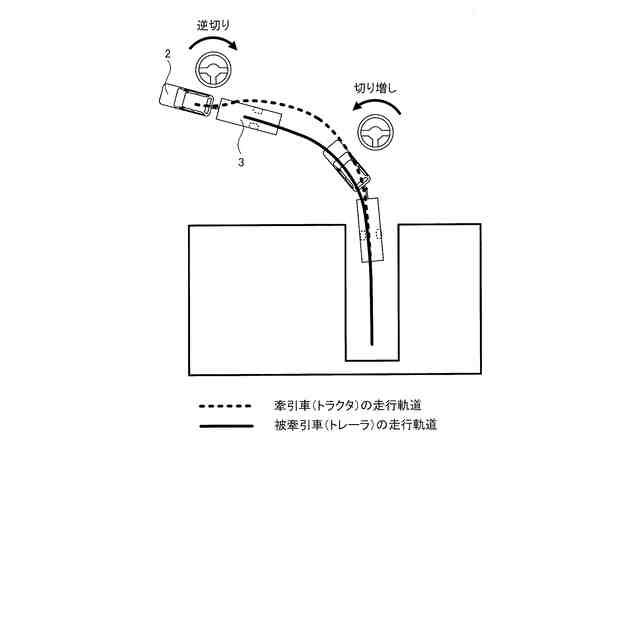
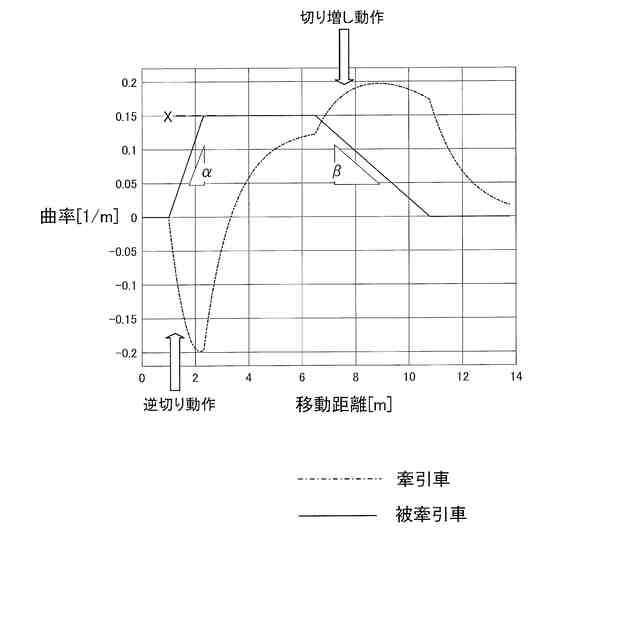
ここで、被牽引車3を牽引する牽引車2が後退して駐車を行う場合において、駐車に要する経路の全長を短くするためには被牽引車3が描く走行軌道の曲率をできる限り短時間で大きくすることが重要である。そこで、図8に示すように先ず後退開始直後に牽引車2は本来の旋回方向(図8であれば運転者から見て左後方に旋回したいので左方向)と逆方向(図8であれば右方向)にあえて操舵する逆切り動作を行い、その後に本来の旋回方向へと操舵することが一般的に行われている。一方で、駐車目標位置に近づいた状態では牽引車2と被牽引車3の接続角度を0度に近づける必要があるが、駐車に要する経路の全長を短くするためには徐々に曲率を小さくするのではなくできる限り曲率が大きい状態を最後まで維持して、最後に素早く曲率を小さくするのが有効であるので、旋回の最後に旋回方向への操舵を増す切り増し動作を行うことが一般的に行われている。
【0007】
上記特許文献1では被牽引車の目標経路の曲率の最大値について許容できる範囲となるように調整することは行っているが、曲率の勾配(変化率)については何ら考慮されていなかった。その結果、上記の逆切り動作や切り増し動作などの曲率の勾配が大きくなる区間において追従不可能な目標経路が設定される虞があった。
【0008】
本発明は前記従来における問題点を解消するためになされたものであり、特に被牽引車の走行軌道の曲率の最大値と勾配について推奨される値を特定することで、駐車時において追従不可能な走行軌道が生成されることなく、より適切な走行軌道を算出することを可能にした駐車支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
前記目的を達成するため本発明に係る駐車支援装置は、牽引車と前記牽引車により牽引される対象となる被牽引車とが連結された状態において前記牽引車と前記被牽引車の駐車を支援する駐車支援装置であって、前記被牽引車の駐車時の走行軌道は、後退開始時点の初期曲率から所定の旋回曲率まで曲率を上昇させつつ後退する第1区間と、前記所定の旋回曲率から曲率を減少させつつ後退する第2区間と、を含み、前記牽引車の走行軌道について許容する曲率又は舵角の最大値を設定する最大値設定部と、前記被牽引車の回転中心から前記牽引車と前記被牽引車との連結点までの距離をトレーラホイールベースとして取得するトレーラホイールベース取得部と、前記牽引車の後輪軸から前記牽引車と前記被牽引車との連結点までの距離である連結距離を取得する連結距離取得部と、前記牽引車の走行軌道の曲率又は舵角が前記最大値を超えないことを条件とした上で前記トレーラホイールベースと前記連結距離とに基づいて、前記被牽引車の駐車時の走行軌道における前記所定の旋回曲率と前記第2区間の曲率勾配の推奨される値を夫々特定するパラメータ特定部と、を有する。
尚、勾配とは、単位距離当たりの勾配の変化率としても良いし、単位時間当たりの勾配の変化率としても良い。
【発明の効果】
【0010】
前記構成を有する本発明に係る駐車支援装置によれば、牽引車の走行軌道において許容される曲率又は舵角の最大値を考慮した上で、トレーラホイールベースと牽引車の後輪軸から連結点までの距離とに基づいて被牽引車の走行軌道の曲率の最大値と勾配について推奨される値を特定することが可能となる。その結果、駐車時において追従不可能な走行軌道が生成されることなく、推奨される値を用いてより適切な走行軌道を算出することが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社アイシン
電池
9日前
株式会社アイシン
変速機
4日前
株式会社アイシン
熱交換器
9日前
株式会社アイシン
ドア支持装置
9日前
株式会社アイシン
車両制御装置
2日前
株式会社アイシン
車両用駆動装置
4日前
株式会社アイシン
バッテリケース
9日前
株式会社アイシン
バッテリ温調装置
9日前
株式会社アイシン
スライドドア装置
3日前
株式会社アイシン
車両制御システム
2日前
株式会社アイシン
電動車用冷却プレート
9日前
株式会社アイシンナノテクノロジーズ
粉体の定量フィーダ装置
9日前
株式会社アイシン
サスペンション制御装置
3日前
株式会社アイシン
ロータの製造方法及びロータ
9日前
株式会社アイシン
数値制御装置および数値制御方法
9日前
株式会社アイシン
プレス成形装置およびプレス成形方法
4日前
トヨタ自動車株式会社
車両前部構造
9日前
国立研究開発法人産業技術総合研究所
超伝導バルク体の製造方法、及び超伝導バルク体
2日前
株式会社 セントラルファインツール
樹脂ギア部品の製造方法および樹脂ギア部品の製造装置
2日前
株式会社豊田中央研究所
回転電機システムの温度に対する状態量の寄与度を解析する温度予測解析装置及びそれを用いた回転電機システム
4日前
個人
飛行自動車
2か月前
個人
警告装置
10日前
個人
授乳用車両
3か月前
個人
眼科手術車
3か月前
個人
小型EVシステム
12日前
個人
自動車運転補助装置
5か月前
日本精機株式会社
ケース
18日前
井関農機株式会社
作業車両
4か月前
個人
アンチロール制御装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
照明装置
1か月前
日本精機株式会社
表示装置
4か月前
日本精機株式会社
表示装置
25日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ