TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024153152
公報種別
公開特許公報(A)
公開日
2024-10-29
出願番号
2023066868
出願日
2023-04-17
発明の名称
衝突判定装置、車両制御装置及び衝突判定方法
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G08G
1/16 20060101AFI20241022BHJP(信号)
要約
【課題】自車両が推定経路の進行方向とは異なる向きに旋回した場合でも、旋回を開始した地点以降の経路における物体との衝突判定を正確に行う。
【解決手段】衝突判定装置10は、自車両が所定の目的地に到達するまでに走行すると想定される、道路形状に沿った経路である自車推定経路を生成する自車推定経路生成部15aと、自車推定経路を判定対象の経路として、自車両の周辺の物体が自車両に衝突する可能性を判定する衝突判定部17と、自車両が、上記旋回をした場合、当該旋回した際の自車両の走行状態、又は、当該旋回した際に上記目的地とは異なる目的地として所定に設定される仮目的地に基づいて、旋回後の自車両が仮目的地に到達するまでに走行する経路である補正用経路を生成する補正用経路生成部19とを備え、衝突判定部17は、自車両が旋回をした場合、判定対象の経路を補正用経路に補正した上で判定を行う。
【選択図】図1
特許請求の範囲
【請求項1】
自車両が所定の目的地に到達するまでに走行すると想定される、道路形状に沿った経路である自車推定経路を生成する自車推定経路生成部と、
前記自車推定経路生成部により生成された自車推定経路を判定対象の経路として、当該判定対象の経路を走行する自車両の周辺の物体が自車両に衝突する可能性を判定する衝突判定部と、
自車両が、前記自車推定経路における進行方向とは異なる向きに旋回した場合、当該旋回した際の自車両の走行状態、又は、当該旋回した際に前記目的地とは異なる目的地として所定に設定される仮目的地に基づいて、当該旋回後の自車両が仮目的地に到達するまでに走行する経路である補正用経路を生成する補正用経路生成部と、
を備え、
前記衝突判定部は、自車両が前記旋回をした場合、判定対象の経路を、前記補正用経路生成部により生成された補正用経路に補正した上で前記判定を行う
ことを特徴とする衝突判定装置。
続きを表示(約 1,500 文字)
【請求項2】
前記補正用経路生成部は、
自車両が前記旋回をした場合、旋回した際の走行状態が継続された場合に自車両が走行すると想定される経路である自車移動経路を、前記補正用経路として生成する自車移動経路生成部により構成される
ことを特徴とする請求項1記載の衝突判定装置。
【請求項3】
前記補正用経路生成部は、
自車両が前記旋回をした場合、旋回した際に所定に設定される前記仮目的地と自車両の位置とを結ぶ地図上の経路である地図経路を、前記補正用経路として生成する地図経路生成部により構成される
ことを特徴とする請求項1記載の衝突判定装置。
【請求項4】
前記補正用経路生成部は、
自車両が前記旋回をした場合、自車両が前記仮目的地に到達するまでに走行すると想定される、道路形状に沿った経路である自車推定経路を、前記補正用経路として再生成する自車推定経路再生成部により構成される
ことを特徴とする請求項1記載の衝突判定装置。
【請求項5】
前記補正用経路生成部は、
自車両が前記旋回をした場合、旋回した際の走行状態が継続された場合に自車両が走行すると想定される経路である自車移動経路を、前記補正用経路として生成する自車移動経路生成部と、
自車両が前記旋回をした場合、当該旋回した際に所定に設定される前記仮目的地と自車両の位置とを結ぶ地図上の経路である地図経路を、前記補正用経路として生成する地図経路生成部と、
自車両が前記旋回をした場合、自車両が前記仮目的地に到達するまでに走行すると想定される、道路形状に沿った経路である自車推定経路を、前記補正用経路として生成する自車推定経路再生成部と、を含んで構成され、
前記衝突判定部は、
自車両が前記旋回をした場合、前記自車移動経路生成部、前記地図経路生成部、及び前記自車推定経路再生成部のそれぞれにより生成された補正用経路からいずれか1つを選択し、判定対象の経路を当該選択した補正用経路に補正した上で前記判定を行う
ことを特徴とする請求項1記載の衝突判定装置。
【請求項6】
前記衝突判定部は、
自車両が前記旋回をした場合、当該旋回をした際の自車両の位置と自車両の周辺の物体との距離、又は、当該旋回以降の自車両の位置と自車両の周辺の物体との距離を算出し、当該算出した距離に応じて、前記補正用経路の選択を行う
ことを特徴とする請求項5記載の衝突判定装置。
【請求項7】
前記衝突判定部は、
前記算出した距離が所定値以下である場合、前記自車移動経路生成部により生成された補正用経路を選択する
ことを特徴とする請求項6記載の衝突判定装置。
【請求項8】
前記衝突判定部は、
前記算出した距離が所定値を上回る場合、前記地図経路生成部又は前記自車推定経路再生成部により生成された補正用経路を選択する
ことを特徴とする請求項6又は請求項7に記載の衝突判定装置。
【請求項9】
前記仮目的地は、
前記自車両が走行する道路本線の路肩領域内における所定位置に設定される
ことを特徴とする請求項1から請求項6のうちのいずれか1項に記載の衝突判定装置。
【請求項10】
前記仮目的地は、
前記自車両が走行する道路本線の路肩領域内における所定位置から道路本線へ合流する際の合流地点に設定される
ことを特徴とする請求項1から請求項6のうちのいずれか1項に記載の衝突判定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、衝突判定装置、車両制御装置及び衝突判定方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、自車両が走行すると推定される推定経路と、自車両の周囲の物体が移動すると推定される推定経路とに基づいて、自車両に対する物体の衝突の有無を判定する衝突判定装置が知られている。例えば、特許文献1に開示された衝突判定装置(以下、「従来装置」ともいう。)では、自車両が将来走行する経路のカーブ半径を推定し、推定したカーブ半径に基づいて自車両の推定経路を算出する。そして、従来装置は、算出した推定経路と、自車両が走行する自車線形状との乖離地点を検出し、検出した乖離地点以降の区間に車線が存在しているか否かを判定する。そして、従来装置は、上記乖離地点以降の区間に車線が存在しないと判定した場合、自車両が走行する道路の形状を示す走行区画線の形状、及び道路曲率に基づいて近似曲線を算出し、算出した近似曲線を用いて、乖離地点以降の区間における自車両の推定経路を補正した上で、自車両と物体との衝突判定を行っている。
【先行技術文献】
【特許文献】
【0003】
特許第6988717号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、推定経路を走行している自車両は、例えば路肩に停車するため、当該推定経路の進行方向とは異なる向きに旋回する場合がある。この場合、自車両は、一時的に推定経路を離脱する。そこで、自車両では、上記従来装置による推定経路の補正技術を応用して、自車両の推定経路を補正した上で、旋回を開始した地点以降の経路における自車両と物体との衝突判定を行うことが考えられる。しかしながら、路肩は本来車両が走行するための領域ではないため、自車両は、上述した近似曲線の算出に必要となる走行区画線の形状及び道路曲率を得られない場合がある。そのため、自車両では、上記従来装置による補正技術を応用したとしても、推定経路の補正を正確に行うことができず、旋回を開始した地点以降の経路における自車両と物体との衝突判定を正確に行えない場合があった。
【0005】
本開示は、上記のような課題を解決するためになされたもので、自車両が推定経路の進行方向とは異なる向きに旋回した場合でも、旋回を開始した地点以降の経路における物体との衝突判定を正確に行うことが可能な衝突判定装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る衝突判定装置は、自車両が所定の目的地に到達するまでに走行すると想定される、道路形状に沿った経路である自車推定経路を生成する自車推定経路生成部と、
自車推定経路生成部により生成された自車推定経路を判定対象の経路として、当該判定対象の経路を走行する自車両の周辺の物体が自車両に衝突する可能性を判定する衝突判定部と、自車両が、自車推定経路における進行方向とは異なる向きに旋回した場合、当該旋回した際の自車両の走行状態、又は、当該旋回した際に上記目的地とは異なる目的地として所定に設定される仮目的地に基づいて、当該旋回後の自車両が仮目的地に到達するまでに走行する経路である補正用経路を生成する補正用経路生成部と、を備え、衝突判定部は、自車両が旋回をした場合、判定対象の経路を、補正用経路生成部により生成された補正用経路に補正した上で判定を行う。
【発明の効果】
【0007】
本開示によれば、上記のように構成したので、自車両が推定経路の進行方向とは異なる向きに旋回した場合でも、旋回を開始した地点以降の経路における物体との衝突判定を正確に行うことが可能となる。
【図面の簡単な説明】
【0008】
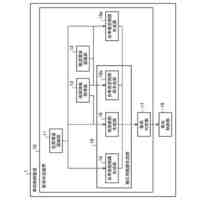
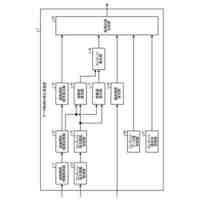
実施の形態1に係る衝突判定装置を備えた車両制御装置の構成例を示す図である。
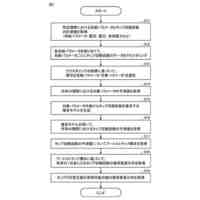
実施の形態1に係る車両制御装置の動作例を示すフローチャートである。
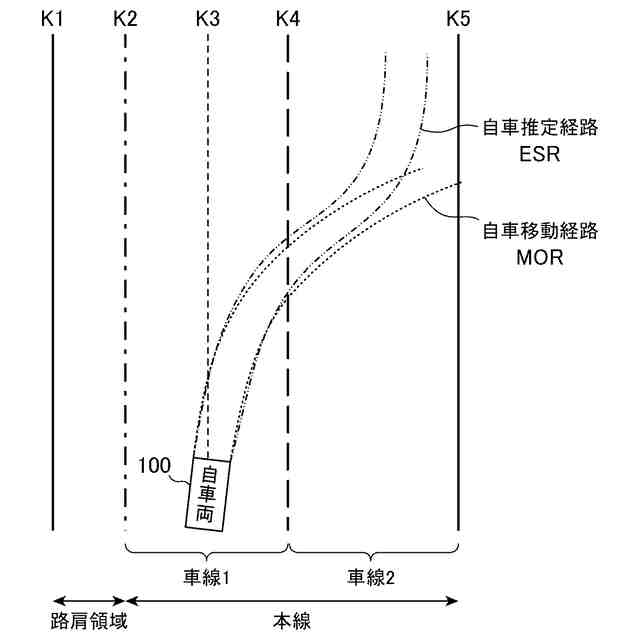
実施の形態1における自車移動経路及び自車推定経路の一例を示す図である。
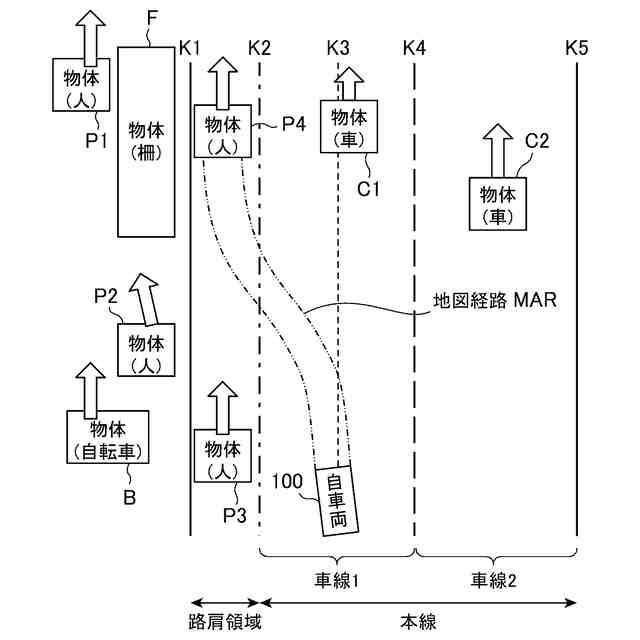
実施の形態1における地図経路及び自車移動経路の一例を示す図である。
実施の形態1における車両制御部による経路の切り替えの一例を示す図である。
実施の形態1における衝突判定部による判定の一例を示す図である。
実施の形態1における自車両が待避所を含む道路を走行する場合の例を示す図である。
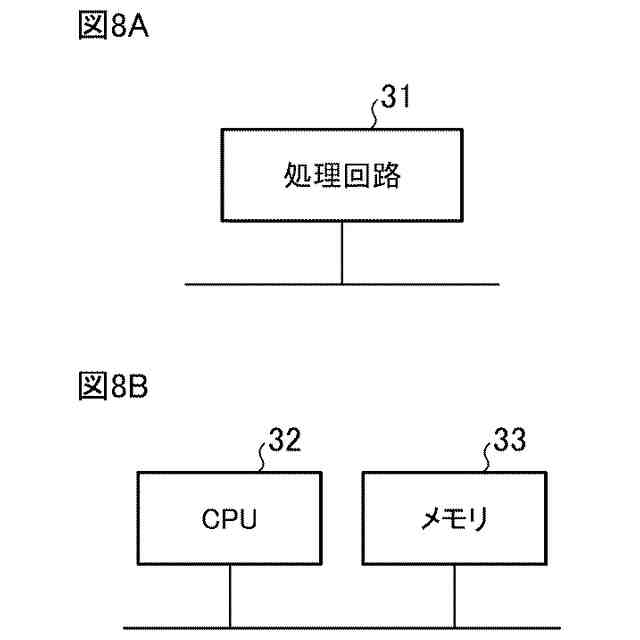
図8A、図8Bは、実施の形態1に係る車両制御装置のハードウェア構成例を示す図である。
実施の形態2に係る車両制御装置の動作例を示すフローチャートである。
実施の形態2における自車移動経路の先に物体が存在する状況の一例を説明する図である。
【発明を実施するための形態】
【0009】
以下、実施の形態について図面を参照しながら詳細に説明する。なお、図面は概略的に示されるものであり、説明の便宜のため、適宜、構成の省略又は構成の簡略化がなされるものである。また、異なる図面にそれぞれ示される構成などの大きさおよび位置の相互関係は、必ずしも正確に記載されるものではなく、適宜変更され得るものである。
また、以下に示される説明では、同様の構成要素には同じ符号を付して図示し、それらの名称と機能とについても同様のものとする。したがって、それらについての詳細な説明を、重複を避けるために省略する場合がある。
【0010】
実施の形態1.
図1は、実施の形態1に係る衝突判定装置10を備えた車両制御装置1の構成例を示す図である。車両制御装置1は、例えば図1に示すように、衝突判定装置10及び車両制御部18を含んで構成されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
清掃具
11日前
三菱電機株式会社
炊飯器
7日前
三菱電機株式会社
冷蔵庫
5日前
三菱電機株式会社
照明装置
6日前
三菱電機株式会社
加熱調理器
5日前
三菱電機株式会社
漏電遮断器
11日前
三菱電機株式会社
加熱調理器
5日前
三菱電機株式会社
半導体装置
5日前
三菱電機株式会社
加熱調理器
5日前
三菱電機株式会社
姿勢変更装置
7日前
三菱電機株式会社
空調システム
6日前
三菱電機株式会社
半導体製造装置
5日前
三菱電機株式会社
浴室暖房システム
6日前
三菱電機株式会社
飛しょう体用レドーム
5日前
三菱電機株式会社
鉄道車両用通信システム
11日前
三菱電機株式会社
半導体装置の制御システム
5日前
三菱電機株式会社
半導体装置及びその製造方法
6日前
三菱電機株式会社
電線保持機構および照明装置
11日前
三菱電機株式会社
緩衝材及び緩衝材の組立方法
6日前
三菱電機株式会社
車両制御装置及び車両制御方法
5日前
三菱電機株式会社
検索システム、検索装置および検索方法
5日前
三菱電機株式会社
生産管理システム、方法、及びプログラム
5日前
三菱電機株式会社
非常用機器および非常用電力供給システム
6日前
三菱電機株式会社
衝突判定装置、車両制御装置及び衝突判定方法
7日前
三菱電機株式会社
照明制御システム、照明器具および照明制御装置
5日前
三菱電機株式会社
通信システム、機器、通信方法およびプログラム
11日前
三菱電機株式会社
半導体装置の検査方法、および、半導体装置の製造方法
5日前
三菱電機株式会社
データ取得計画立案装置およびデータ取得計画立案方法
5日前
三菱電機株式会社
駅舎電源装置、回生判定方法、および回生判定プログラム
5日前
三菱電機株式会社
半導体装置、電力変換装置、および、半導体装置の製造方法
5日前
三菱電機株式会社
画像色濃度調整装置、画像色濃度調整方法、および、撮像装置
7日前
三菱電機株式会社
在庫管理装置、在庫管理システム、在庫管理方法、及びプログラム
11日前
三菱電機株式会社
回転電機のステータ、回転電機および回転電機のステータの製造方法
6日前
三菱電機株式会社
パワーモジュール、パワーモジュールの製造方法および電力変換装置
6日前
三菱電機株式会社
タップ付き変圧器の管理方法、サーバ、プログラム、電源管理システム
7日前
三菱電機株式会社
半導体装置の製造方法
11日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ