TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024146272
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023059069
出願日
2023-03-31
発明の名称
距離算出精度確認方法
出願人
中国電力株式会社
代理人
弁理士法人ライトハウス国際特許事務所
主分類
G01S
11/08 20060101AFI20241004BHJP(測定;試験)
要約
【課題】
無線装置間の通信の伝搬時間を基に算出された無線装置間の距離が、正しいか否かを確認するための方法を提供する。
【解決手段】
無線装置間の物理的な距離を取得し、取得した物理的な距離と理論上の距離とが所定の条件を満たすか否かを判定するための方法であって、コンピュータ装置に、無線装置間の通信の伝搬時間を基に、無線装置間の理論上の距離を算出する距離算出ステップを実行させる、方法。
【選択図】 図3
特許請求の範囲
【請求項1】
無線装置間の物理的な距離を取得し、取得した物理的な距離と理論上の距離とが所定の条件を満たすか否かを判定するための方法であって、
コンピュータ装置に、
無線装置間の通信の伝搬時間を基に、無線装置間の理論上の距離を算出する距離算出ステップ
を実行させる、
方法。
続きを表示(約 1,200 文字)
【請求項2】
距離算出ステップが、無線装置間の内部時計の時刻のずれを基に距離を算出するものである、
請求項1に記載の方法。
【請求項3】
コンピュータ装置に、
無線装置間で信号の送受信を行うことにより、無線装置間の内部時計の時刻のずれを算出する時刻ずれ算出ステップと、
算出された時刻のずれを基に、無線装置間の内部時計の時刻のずれを補正する時刻ずれ補正ステップと
を実行させ、
距離算出ステップが、時刻ずれ補正手段が時刻のずれを補正した後に、距離を算出するものである、
請求項1又は2に記載の方法。
【請求項4】
コンピュータ装置に、
無線装置間で信号の送受信を行うことにより、無線装置間の内部時計の位相のずれを算出する位相ずれ算出ステップと、
算出された位相のずれを基に、無線装置間の内部時計の位相のずれを補正する位相ずれ補正ステップと
を実行させ、
時刻ずれ算出ステップが、位相ずれ補正ステップが位相のずれを補正した後に、時刻のずれを算出するものである、
請求項3に記載の方法。
【請求項5】
無線装置に、
他の無線装置と通信する通信ステップ
を実行させ、
通信ステップが、電波暗室内で行われるものである、
請求項1又は2に記載の方法。
【請求項6】
無線装置に、
他の無線装置と通信する通信ステップ
を実行させ、
通信ステップが、無線装置の少なくとも一部を被覆する被覆部の一部が、他の無線装置の方向に向かって開口している状態で通信するものであり、
被覆部が、通信ステップにより送受信される電波を吸収する機能及び/又は反射する機能を有するものである、
請求項1又は2に記載の方法。
【請求項7】
2つの無線装置を、物理的な距離が特定された2点のそれぞれに配置する配置ステップ
を有する、
請求項1又は2に記載の方法。
【請求項8】
無線装置を、スライドレールに沿って移動させる移動ステップ
を有する、
請求項1又は2に記載の方法。
【請求項9】
請求項8に記載の方法を実行するための装置であって、
上面が平面上の定盤と、
定盤の上面に設けられたスライドレールと、
を備える、
装置。
【請求項10】
少なくとも2つの無線装置を備えるシステムであって、
無線装置間の通信の伝搬時間を基に、無線装置間の理論上の距離を算出する距離算出手段と、
無線装置間の物理的な距離と、距離算出手段により算出された理論上の距離とが、所定の条件を満たすか否かを判定する判定手段と
を備える、
システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、方法、装置、及びシステムに関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
従来、2つの無線装置の間の距離を算出するために、2つの無線装置の間で信号の送受信を行い、信号の伝搬時間に信号の伝搬速度を乗じる方法が採用されている。
【0003】
このような方法で算出された無線装置間の距離は、理論上の距離であり、実際の、物理的な距離とは異なる場合がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、無線装置間の通信の伝搬時間を基に算出された無線装置間の距離が、正しいか否かを確認するための方法を提供することである。
【課題を解決するための手段】
【0005】
本発明によれば、上記目的は、
[1]無線装置間の物理的な距離を取得し、取得した物理的な距離と理論上の距離とが所定の条件を満たすか否かを判定するための方法であって、コンピュータ装置に、無線装置間の通信の伝搬時間を基に、無線装置間の理論上の距離を算出する距離算出ステップを実行させる、方法;
[2]距離算出ステップが、無線装置間の内部時計の時刻のずれを基に距離を算出するものである、[1]に記載の方法;
[3]コンピュータ装置に、無線装置間で信号の送受信を行うことにより、無線装置間の内部時計の時刻のずれを算出する時刻ずれ算出ステップと、算出された時刻のずれを基に、無線装置間の内部時計の時刻のずれを補正する時刻ずれ補正ステップとを実行させ、距離算出ステップが、時刻ずれ補正手段が時刻のずれを補正した後に、距離を算出するものである、[1]又は[2]に記載の方法;
[4]コンピュータ装置に、無線装置間で信号の送受信を行うことにより、無線装置間の内部時計の位相のずれを算出する位相ずれ算出ステップと、算出された位相のずれを基に、無線装置間の内部時計の位相のずれを補正する位相ずれ補正ステップとを実行させ、時刻ずれ算出ステップが、位相ずれ補正ステップが位相のずれを補正した後に、時刻のずれを算出するものである、[3]に記載の方法;
[5]無線装置に、他の無線装置と通信する通信ステップを実行させ、通信ステップが、電波暗室内で行われるものである、[1]~[4]のいずれかに記載の方法;
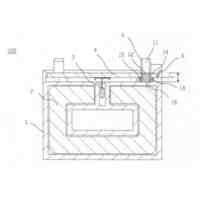
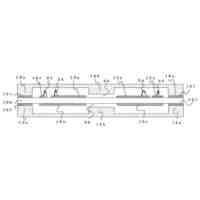
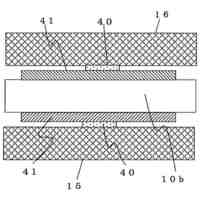
[6]無線装置に、他の無線装置と通信する通信ステップを実行させ、通信ステップが、無線装置の少なくとも一部を被覆する被覆部の一部が、他の無線装置の方向に向かって開口している状態で通信するものであり、被覆部が、通信ステップにより送受信される電波を吸収する機能及び/又は反射する機能を有するものである、[1]~[5]のいずれかに記載の方法;
[7]2つの無線装置を、物理的な距離が特定された2点のそれぞれに配置する配置ステップを有する、[1]~[6]のいずれかに記載の方法;
[8]無線装置を、スライドレールに沿って移動させる移動ステップを有する、[1]~[7]のいずれかに記載の方法;
[9][8]に記載の方法を実行するための装置であって、上面が平面上の定盤と、定盤の上面に設けられたスライドレールと、を備える、装置;
[10]少なくとも2つの無線装置を備えるシステムであって、無線装置間の通信の伝搬時間を基に、無線装置間の理論上の距離を算出する距離算出手段と、無線装置間の物理的な距離と、距離算出手段により算出された理論上の距離とが、所定の条件を満たすか否かを判定する判定手段とを備える、システム;
[11]無線装置間の物理的な距離を取得する距離取得手段を備える、[10]に記載のシステム;
により達成することができる。
【発明の効果】
【0006】
本発明によれば、無線装置間の通信の伝搬時間を基に算出された無線装置間の距離が、正しいか否かを確認するための方法を提供することができる。
【図面の簡単な説明】
【0007】
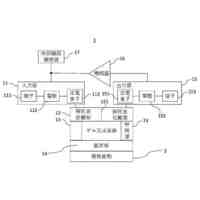
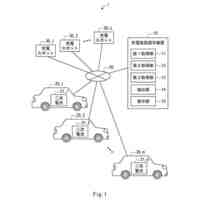
本発明の実施の形態にかかる、システムの構成を示すブロック図である。
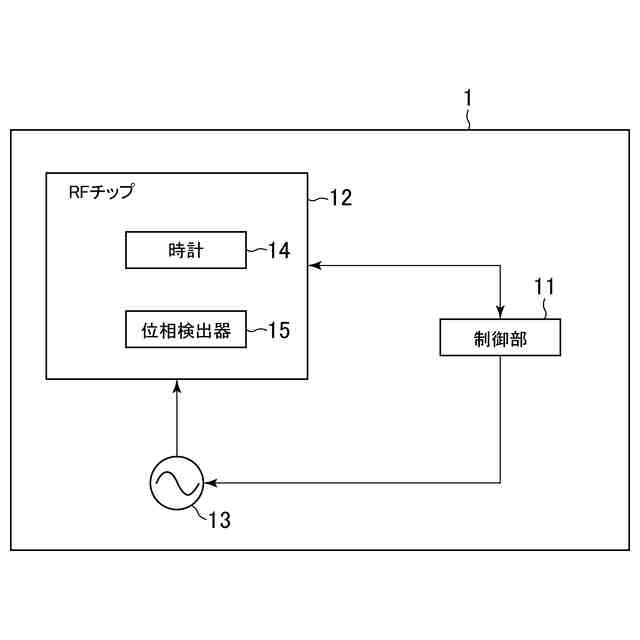
本発明の実施の形態にかかる、無線装置のハードウェア構成を示すブロック図である。
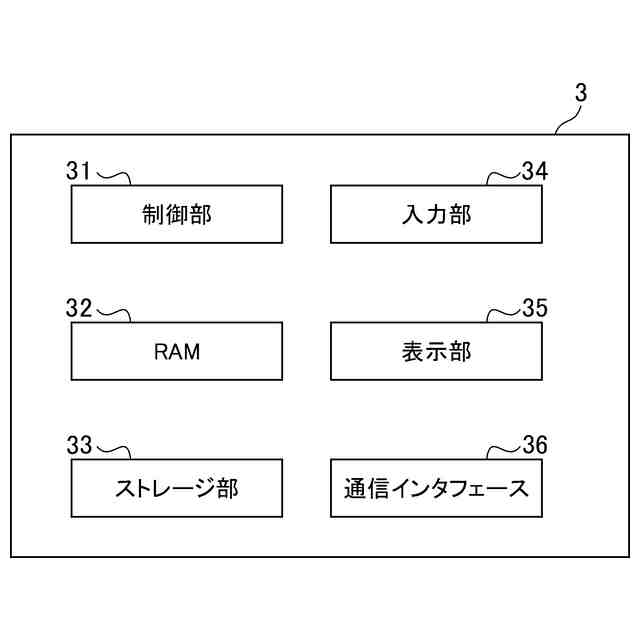
本発明の実施の形態にかかる、コンピュータ装置のハードウェア構成を示すブロック図である。
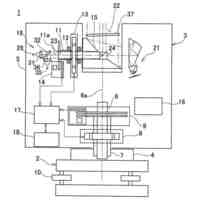
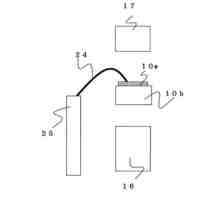
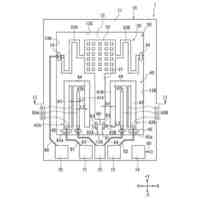
本発明の実施の形態にかかる、システムの使用例を示す図である。
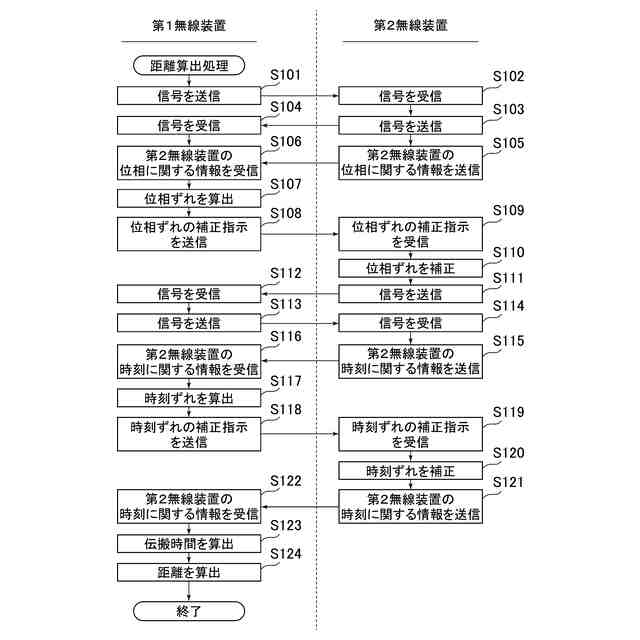
本発明の実施の形態にかかる、距離算出処理のフローチャートを示す図である。
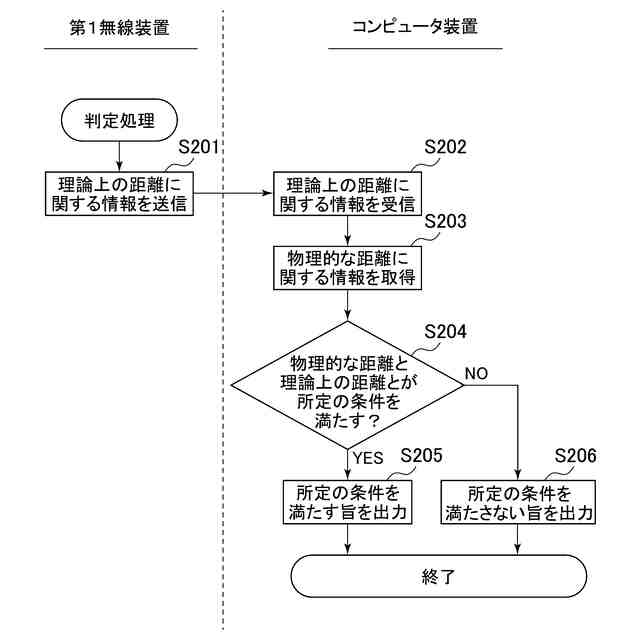
本発明の実施の形態にかかる、判定処理のフローチャートを示す図である。
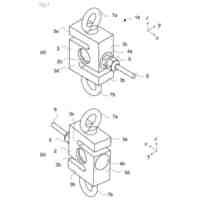
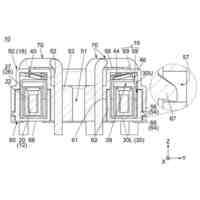
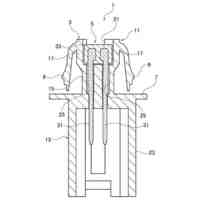
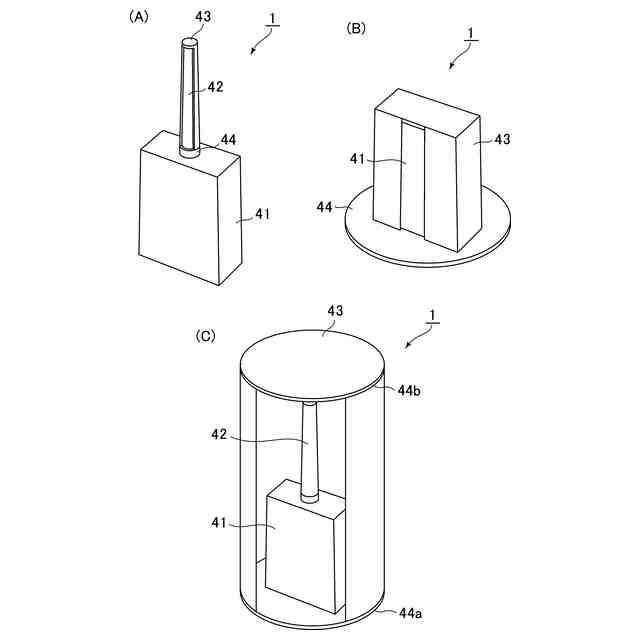
本発明の実施の形態にかかる、無線装置の例を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の実施の形態について説明をするが、本発明の趣旨に反しない限り、本発明は、以下の実施の形態に限定されない。以下で説明するフローチャートを構成する各処理の順序は、処理内容に矛盾や不整合が生じない範囲で順不同であり、また、処理内容に矛盾や不整合が生じない範囲で、フローチャートを構成する各処理の一部を省略することや、フローチャートを構成する各処理に新たな処理を追加することも可能である。また、フローチャートを構成する各処理を実行する主体となる装置は、本発明の趣旨に反しない限り、他の装置へ変更することが可能である。その際、処理内容に矛盾や不整合が生じないように、処理内容を変更することが可能である。
【0009】
図1は、本発明の実施の形態にかかる、システムの構成を示すブロック図である。図1に示すように、システム10は、少なくとも2つの無線装置1(1a及び1b)を備える。無線装置1aと1bとは、無線通信により、直接的に、相互に接続することが可能であってよい。また、システム10は、コンピュータ装置3を備えていてもよい。コンピュータ装置3は、少なくとも1の無線装置1と通信ネットワーク2を介して通信接続が可能であってよい。
【0010】
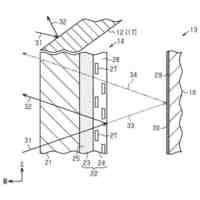
図2は、本発明の実施の形態にかかる、無線装置のハードウェア構成を示すブロック図である。無線装置1は、制御部11、RFチップ12、発振器13、時計14、及び位相検出器15を備えている。RFチップ12には、時計14、及び位相検出器15が備えられている。無線装置1は、必要に応じて、制御部11、RFチップ12、発振器13、時計14、及び位相検出器15以外の要素を備えていてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
中国電力株式会社
充放電制御システム、及び充放電制御方法
1日前
中国電力株式会社
充放電制御システム、及び充放電制御方法
1日前
株式会社大真空
センサ
13日前
甲神電機株式会社
漏電検出器
18日前
甲神電機株式会社
電流センサ
18日前
甲神電機株式会社
電流検出器
18日前
ユニパルス株式会社
ロードセル
12日前
東レ株式会社
液体展開用シート
5日前
株式会社高橋型精
採尿具
19日前
株式会社トプコン
測量装置
18日前
アズビル株式会社
熱式流量計
19日前
株式会社トプコン
植物センサ
1日前
株式会社クボタ
作業車両
4日前
キヤノン電子株式会社
サーボ加速度計
5日前
キヤノン電子株式会社
サーボ加速度計
5日前
キヤノン電子株式会社
サーボ加速度計
5日前
日本特殊陶業株式会社
ガスセンサ
19日前
豊田合成株式会社
表示装置
18日前
シャープ株式会社
収納装置
19日前
トヨタ自動車株式会社
画像検査装置
13日前
株式会社東京久栄
水中移動体用採水器
19日前
株式会社大真空
センサ及びその製造方法
12日前
横河電機株式会社
光源装置
19日前
ローム株式会社
MEMSデバイス
19日前
TDK株式会社
温度センサ
19日前
公立大学法人大阪
蛍光X線分析装置
13日前
ローム株式会社
MEMS装置
25日前
タカハタプレシジョン株式会社
水道メータ
25日前
株式会社トーキン
電流センサ
4日前
矢崎総業株式会社
サーミスタ
5日前
株式会社テクノメデイカ
採血分注システム
18日前
三菱電機株式会社
振動センサ
1日前
株式会社デンソー
電圧検出回路
4日前
トヨタ自動車株式会社
充電施設提示システム
12日前
株式会社デンソー
電圧検出回路
4日前
株式会社日本マイクロニクス
プローブ
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ