TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024145636
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058076
出願日
2023-03-31
発明の名称
自律走行ロボット及び制御システム
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G08B
25/04 20060101AFI20241004BHJP(信号)
要約
【課題】人物が自律走行ロボットとともにセキュリティゲートを通過することを適切に防止することができる自律走行ロボット及び制御システムを提供する。
【解決手段】自律走行ロボットは、自律して走行する自律走行ロボットであって、セキュリティゲートを通過するように走行制御する制御手段と、セキュリティゲートを通過する自律走行ロボットとともにそのセキュリティゲートを通過する不正侵入者、又は、セキュリティゲートを通過する自律走行ロボットとともにそのセキュリティゲートを通過するおそれがある不正侵入者候補を検出する検出手段と、検出手段により不正侵入者又は不正侵入者候補が検出された場合に、自律走行ロボットの筐体を用いて、不正侵入者又は不正侵入者候補によるセキュリティゲートの通過を規制する規制手段と、を有する。
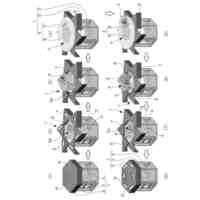
【選択図】図6
特許請求の範囲
【請求項1】
自律して走行する自律走行ロボットであって、
セキュリティゲートを通過するように走行制御する制御手段と、
前記セキュリティゲートを通過する前記自律走行ロボットとともに当該セキュリティゲートを通過する不正侵入者、又は、前記セキュリティゲートを通過する前記自律走行ロボットとともに当該セキュリティゲートを通過するおそれがある不正侵入者候補を検出する検出手段と、
前記検出手段により前記不正侵入者又は前記不正侵入者候補が検出された場合に、前記自律走行ロボットの筐体を用いて、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過を規制する規制手段と、
を有することを特徴とする自律走行ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記規制手段は、前記セキュリティゲート内に前記自律走行ロボットを停止させることにより、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過を規制する、請求項1に記載の自律走行ロボット。
【請求項3】
前記規制手段は、前記自律走行ロボットと前記セキュリティゲートの間の隙間を狭くすることにより、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過を規制する、請求項1または2に記載の自律走行ロボット。
【請求項4】
前記規制手段は、前記セキュリティゲートに対する前記自律走行ロボットの向きを変更することにより、前記自律走行ロボットと前記セキュリティゲートの間の隙間を狭くする、請求項3に記載の自律走行ロボット。
【請求項5】
本体部に接続され動作可能な可動部をさらに有し、
前記規制手段は、前記可動部を動作させることにより、前記自律走行ロボットと前記セキュリティゲートの間の隙間を狭くする、請求項3に記載の自律走行ロボット。
【請求項6】
前記自律走行ロボットの周囲に存在する人物の人物位置を取得する取得手段をさらに有し、
前記規制手段は、前記自律走行ロボットと前記人物の位置関係、又は、前記自律走行ロボットと前記人物の位置関係の変化に基づいて、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過を規制するか否かを判定し、又は、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過の規制方法を決定する、請求項1または2に記載の自律走行ロボット。
【請求項7】
自律して走行する自律走行ロボットを有する制御システムであって、
前記自律走行ロボットが、
セキュリティゲートを通過するように走行制御する制御手段を有し、
前記制御システムが、
前記セキュリティゲートを通過する前記自律走行ロボットとともに当該セキュリティゲートを通過する不正侵入者、又は、前記セキュリティゲートを通過する前記自律走行ロボットとともに当該セキュリティゲートを通過するおそれがある不正侵入者候補を検出する検出手段と、
前記検出手段により前記不正侵入者又は前記不正侵入者候補が検出された場合に、前記自律走行ロボットの筐体を用いて、前記不正侵入者又は前記不正侵入者候補による前記セキュリティゲートの通過を規制する規制手段と、を有する、
ことを特徴とする制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行ロボット及び制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
近年、常駐警備員の代わりに、施設内を自律して走行し、巡回警備、点検業務等を行う自律走行ロボットが開発されている。自律走行ロボットが施設内を移動する際、施設内に設置されたフラッパーゲート、スウィングゲート等のセキュリティゲートが自律走行ロボットの障壁となり得る。そのため、自律走行ロボットを有するシステムでは、自律走行ロボットがセキュリティゲートの開閉を制御できるように、自律走行ロボットとセキュリティゲートが連携することが要求されている。一方、自律走行ロボットがセキュリティゲートを通過する際に、通過権限を持たない人物が自律走行ロボットとともにセキュリティゲートを通過するいわゆる「共連れ」侵入、又は、セキュリティゲートを挟んで自律走行ロボットの反対側からセキュリティゲートを通過するいわゆる「すれ違い」侵入を防止することが求められている。
【0003】
特許文献1には、共連れを検知する入退室センサ装置が設置されたゲート装置において共連れの発生が検知された場合にゲート装置を施錠するゲート管理装置が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-055955号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
人物が自律走行ロボットとともにセキュリティゲートを通過することを適切に防止することが求められている。
【0006】
本発明の目的は、人物が自律走行ロボットとともにセキュリティゲートを通過することを適切に防止することができる自律走行ロボット及び制御システムを提供することにある。
【課題を解決するための手段】
【0007】
かかる課題を解決するため本発明は、自律して走行する自律走行ロボットであって、セキュリティゲートを通過するように走行制御する制御手段と、セキュリティゲートを通過する自律走行ロボットとともにそのセキュリティゲートを通過する不正侵入者、又は、セキュリティゲートを通過する自律走行ロボットとともにそのセキュリティゲートを通過するおそれがある不正侵入者候補を検出する検出手段と、検出手段により不正侵入者又は不正侵入者候補が検出された場合に、自律走行ロボットの筐体を用いて、不正侵入者又は不正侵入者候補によるセキュリティゲートの通過を規制する規制手段と、を有する自律走行ロボットを提供する。
【0008】
この自律走行ロボットにおいて、規制手段は、セキュリティゲート内に自律走行ロボットを停止させることにより、不正侵入者又は不正侵入者候補によるセキュリティゲートの通過を規制することが好適である。
【0009】
この自律走行ロボットにおいて、規制手段は、自律走行ロボットとセキュリティゲートの間の隙間を狭くすることにより、不正侵入者又は不正侵入者候補によるセキュリティゲートの通過を規制することが好適である。
【0010】
この自律走行ロボットにおいて、規制手段は、セキュリティゲートに対する自律走行ロボットの向きを変更することにより、自律走行ロボットとセキュリティゲートの間の隙間を狭くすることが好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セコム株式会社
適応装置
16日前
セコム株式会社
監視装置
16日前
セコム株式会社
監視装置
16日前
セコム株式会社
顔認証装置
10日前
セコム株式会社
監視システム
10日前
セコム株式会社
監視システム
10日前
セコム株式会社
ゲート制御システム
10日前
セコム株式会社
表示装置及びプログラム
10日前
セコム株式会社
表示装置及びプログラム
10日前
セコム株式会社
学習モデル及び識別装置
15日前
個人
飛行体の格納装置
1日前
セコム株式会社
対話システム及びセンタ装置
22日前
セコム株式会社
センタ装置及び対話システム
22日前
セコム株式会社
センタ装置及び対話システム
22日前
セコム株式会社
自律走行ロボット及び制御システム
10日前
セコム株式会社
自律走行ロボット及び制御システム
10日前
セコム株式会社
自律走行ロボット及び制御システム
10日前
セコム株式会社
画像処理装置及び画像処理プログラム
10日前
セコム株式会社
画像処理装置及び画像処理プログラム
10日前
セコム株式会社
姿勢データ生成装置及び行動認識装置
15日前
セコム株式会社
データ判定装置及びデータ判定システム
10日前
セコム株式会社
通信装置、通信システム及びプログラム
10日前
セコム株式会社
店舗運営支援システム及び店舗運営支援方法
15日前
セコム株式会社
店舗運営支援システム及び店舗運営支援方法
15日前
能美防災株式会社
発信装置、及び発信システム
14日前
能美防災株式会社
発信装置、及び発信システム
10日前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
21日前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
21日前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
21日前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
3か月前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
3か月前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
3か月前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
3か月前
株式会社デンソーウェーブ
認証対象特定方法、規制解除方法、および入退室管理セキュリティシステム
7日前
個人
火器使用警報装置
今日
個人
防犯砂利システム
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ