TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024135386
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023046040
出願日
2023-03-22
発明の名称
飛行ロボット制御システム及び飛行ロボット制御方法
出願人
セコム株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/46 20240101AFI20240927BHJP(制御;調整)
要約
【課題】自律して飛行する飛行ロボットに対する、操作装置を用いた手動操作を適切に制限することができる飛行ロボット制御システム及び飛行ロボット制御方法を提供する。
【解決手段】飛行ロボット制御システムは、飛行ロボット及び操作装置を有し、飛行ロボットの飛行モードとして、飛行ロボットが自律して飛行する自律飛行モード、及び、操作装置を用いた手動操作に従って飛行する手動飛行モードのうちの何れかを設定するモード設定部と、実行中のタスクの次のタスクの開始までの猶予時間を取得する取得部と、を有し、モード設定部は、猶予時間に基づいて、手動飛行モードに対して制限を行う。
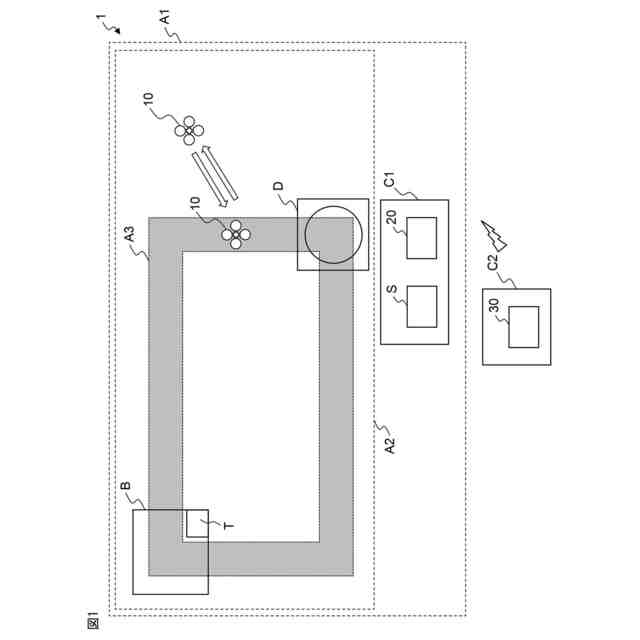
【選択図】図1
特許請求の範囲
【請求項1】
飛行ロボット及び操作装置を有する飛行ロボット制御システムであって、
前記飛行ロボットの飛行モードとして、前記飛行ロボットが自律して飛行する自律飛行モード、及び、前記操作装置を用いた手動操作に従って飛行する手動飛行モードのうちの何れかを設定するモード設定部と、
実行中のタスクの次のタスクの開始までの猶予時間を取得する取得部と、を有し、
前記モード設定部は、前記猶予時間に基づいて、前記手動飛行モードに対して制限を行う、
ことを特徴とする飛行ロボット制御システム。
続きを表示(約 1,200 文字)
【請求項2】
前記取得部は、前記飛行ロボットの前記実行中のタスクの完了までの残り時間を取得し、
前記モード設定部は、前記残り時間及び前記猶予時間に基づいて、前記手動飛行モードに対して制限を行う、請求項1に記載の飛行ロボット制御システム。
【請求項3】
前記モード設定部は、前記自律飛行モードから前記手動飛行モードへの前記飛行モードの変更の制限、又は、前記手動飛行モードにおける前記手動操作の一部の操作の制限を行う、請求項1に記載の飛行ロボット制御システム。
【請求項4】
前記モード設定部は、前記実行中のタスクが、巡回経路上で巡回飛行を行う巡回タスクである場合に、前記手動飛行モードに対して制限を行い、
前記取得部は、前記残り時間として、前記飛行ロボットの現在位置から前記巡回経路上の所定位置まで移動するのに要する時間を取得する、請求項2に記載の飛行ロボット制御システム。
【請求項5】
前記モード設定部は、前記猶予時間から前記残り時間を減算した時間に基づいて、前記手動飛行モードによる手動操作可能時間を算出し、前記手動操作可能時間に基づいて、前記手動飛行モードに対して制限を行う、請求項2または4に記載の飛行ロボット制御システム。
【請求項6】
前記モード設定部は、前記手動飛行モードを設定した場合、前記飛行ロボットの現在位置から、前記手動飛行モードを設定した時の前記飛行ロボットの位置まで移動するために要する時間に基づいて、前記手動操作可能時間を更新する、請求項5に記載の飛行ロボット制御システム。
【請求項7】
前記モード設定部は、前記手動操作可能時間が閾値以下になった場合、前記飛行ロボットを、前記手動飛行モードを設定した時の前記飛行ロボットの位置まで移動させ、前記実行中のタスクを再開させる、請求項5に記載の飛行ロボット制御システム。
【請求項8】
前記モード設定部は、前記次のタスクの実行タイミングを守る必要性に基づいて、前記猶予時間を補正する、請求項1~4の何れか一項に記載の飛行ロボット制御システム。
【請求項9】
前記モード設定部は、前記次のタスクを実行するために前記飛行ロボットのバッテリの交換が必要であるか否か、又は、前記飛行ロボットのバッテリの交換に要する交換時間に基づいて、前記猶予時間を補正する、請求項1~4の何れか一項に記載の飛行ロボット制御システム。
【請求項10】
コンピュータが、
飛行ロボットの飛行モードとして、前記飛行ロボットが自律して飛行する自律飛行モード、及び、操作装置を用いた手動操作に従って飛行する手動飛行モードのうちの何れかを設定し、
実行中のタスクの次のタスクの開始までの猶予時間を取得することを含み、
前記設定において、前記猶予時間に基づいて、前記手動飛行モードに対して制限を行う、
ことを特徴とする飛行ロボット制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、飛行ロボット及び操作装置を有する飛行ロボット制御システム及び飛行ロボット制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、駅、商業施設、発電所等の施設の警備において、自律して飛行し且つ帰還、追跡、検知、移動、巡回等のタスクを実行する飛行ロボットが開発されている。このような飛行ロボットにおいて、特定の箇所を重点的に確認したい場合、又は、飛行ロボットが追跡対象を見失ってしまった場合等に、操作装置を用いた手動操作によって飛行ロボットを操作できることが望まれている。
【0003】
例えば、特許文献1には、自律的に飛行可能であり且つユーザの無線コントローラ装置等による操作によって制御可能な準自律的飛行可能な飛行ロボットが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-162438号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
自律して飛行する飛行ロボットに対して、複数のタスクを実行するようにスケジュールが設定されている場合がある。その場合、飛行ロボットに対して手動操作を自由に許可すると、飛行ロボットが予定されていたタスクを実行できなくなる可能性がある。
【0006】
本発明の目的は、自律して飛行する飛行ロボットに対する、操作装置を用いた手動操作を適切に制限することができる飛行ロボット制御システム及び飛行ロボット制御方法を提供することにある。
【課題を解決するための手段】
【0007】
かかる課題を解決するため本発明は、飛行ロボット及び操作装置を有する飛行ロボット制御システムであって、飛行ロボットの飛行モードとして、飛行ロボットが自律して飛行する自律飛行モード、及び、操作装置を用いた手動操作に従って飛行する手動飛行モードのうちの何れかを設定するモード設定部と、実行中のタスクの次のタスクの開始までの猶予時間を取得する取得部と、を有し、モード設定部は、猶予時間に基づいて、手動飛行モードに対して制限を行う飛行ロボット制御システムを提供する。
【0008】
この飛行ロボット制御システムにおいて、取得部は、飛行ロボットの実行中のタスクの完了までの残り時間を取得し、モード設定部は、残り時間及び猶予時間に基づいて、手動飛行モードに対して制限を行うことが好適である。
【0009】
この飛行ロボット制御システムにおいて、モード設定部は、自律飛行モードから手動飛行モードへの飛行モードの変更の制限、又は、手動飛行モードにおける手動操作の一部の操作の制限を行うことが好適である。
【0010】
この飛行ロボット制御システムにおいて、モモード設定部は、実行中のタスクが、巡回経路上で巡回飛行を行う巡回タスクである場合に、手動飛行モードに対して制限を行い、取得部は、残り時間として、飛行ロボットの現在位置から巡回経路上の所定位置まで移動するのに要する時間を取得することが好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セコム株式会社
監視装置
3日前
セコム株式会社
適応装置
3日前
セコム株式会社
監視装置
3日前
セコム株式会社
学習モデル及び識別装置
2日前
セコム株式会社
姿勢データ生成装置及び行動認識装置
2日前
セコム株式会社
店舗運営支援システム及び店舗運営支援方法
2日前
セコム株式会社
店舗運営支援システム及び店舗運営支援方法
2日前
能美防災株式会社
発信装置、及び発信システム
1日前
セコム株式会社
飛行ロボット制御システム及び飛行ロボット制御方法
8日前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
無人走行体
12日前
株式会社豊田自動織機
自動走行体
23日前
エイブリック株式会社
基準電圧回路
1日前
アズビル株式会社
設定システム
2日前
オムロン株式会社
自律作業システム
12日前
株式会社熊谷組
巡回ルート作成装置
1日前
株式会社ダイヘン
電力変換装置
3日前
株式会社ダイヘン
電力変換装置
3日前
エイブリック株式会社
シャントレギュレータ
8日前
エイブリック株式会社
ボルテージレギュレータ
5日前
株式会社ダイフク
搬送設備
1か月前
オムロン株式会社
設計装置および設計方法
12日前
株式会社フカデン
外周部加工システム
1か月前
株式会社ダイフク
物品搬送設備
12日前
株式会社デンソー
電子制御装置
22日前
東芝ライテック株式会社
管理システム
8日前
株式会社FUJI
作業機の操作表示システム
2日前
大阪瓦斯株式会社
二次圧制御機構
1か月前
日立建機株式会社
自律走行システム
1か月前
大阪瓦斯株式会社
二次圧制御機構
1か月前
アズビル株式会社
診断システムおよび診断方法
8日前
株式会社豊田自動織機
無人走行体の走行制御システム
1日前
株式会社デンソー
移動体制御装置
1か月前
株式会社栗本鐵工所
触覚提示装置
2日前
トヨタ自動車株式会社
ソーラー充電システム
8日前
ローム株式会社
リニア電源回路
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ