TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024144008
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023147456
出願日
2023-09-12
発明の名称
異常検出装置、検出装置、および車両
出願人
トヨタ自動車株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B60W
40/02 20060101AFI20241003BHJP(車両一般)
要約
【課題】車両近傍の物標による異常を検出し、無人運転による車両の走行が妨げられることを抑制または防止することができる技術を提供する。
【解決手段】異常検出装置は、無人運転により走行可能な車両の走路の物標、車両の周囲の物標、および車両に取り付けられた物標のうち少なくともいずれか一つの物標を検出可能な検出装置による少なくともいずれか一つの物標の検出結果を解析して、異常を検出する異常検出部と、異常が検出された場合に、異常が検出されなかった場合とは異なる信号を出力する出力部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
異常検出装置であって、
無人運転により走行可能な車両の走路の物標、前記車両の周囲の物標、および前記車両に取り付けられた物標のうち少なくともいずれか一つの物標を検出可能な検出装置による前記少なくともいずれか一つの物標の検出結果を解析して、異常を検出する異常検出部と、
前記異常が検出された場合に、前記異常が検出されなかった場合とは異なる信号を出力する出力部と、を備える、
異常検出装置。
続きを表示(約 1,700 文字)
【請求項2】
前記検出装置は、前記いずれか一つの物標とともに、さらに、前記車両の画像および前記車両の3次元点群データのいずれかを検出する、請求項1に記載の異常検出装置。
【請求項3】
請求項1に記載の異常検出装置であって、
前記検出装置は、前記走路の物標を検出し、
前記異常検出部は、前記検出装置による前記走路の物標の検出結果を解析した解析結果が、前記走路の物標が異物であると判定するための予め定められた条件を満たす場合に、前記走路の異物を前記異常として検出する、
異常検出装置。
【請求項4】
請求項3に記載の異常検出装置であって、
さらに、検出された前記走路の異物に関する情報を用いて、前記車両の走行可否と、前記車両を向かわせる目的地の変更と、の少なくともいずれかを含む走行方法を決定する走行方法決定部、を備える、
異常検出装置。
【請求項5】
請求項4に記載の異常検出装置であって、
前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の種類を特定し、
前記走行方法決定部は、特定された前記液体の種類を用いて、前記走行方法を決定する、
異常検出装置。
【請求項6】
請求項4に記載の異常検出装置であって、
前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の量が予め定められた第一閾値以上か否かを判定し、
前記走行方法決定部は、前記液体の量が前記第一閾値以上である場合に、前記車両を停止すると判定し、前記液体の量が前記第一閾値未満である場合に、前記目的地を修理工程に変更する、
異常検出装置。
【請求項7】
請求項4に記載の異常検出装置であって、
前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が前記車両の車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品であると判定した場合に、さらに前記車両用部品の種類を特定し、
前記走行方法決定部は、特定された前記車両用部品の種類を用いて、前記走行方法を決定する、
異常検出装置。
【請求項8】
請求項4に記載の異常検出装置であって、
前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が前記車両の車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品であると判定された場合に、さらに、前記車両用部品の体積または数が予め定められた第二閾値以上か否かを判定し、
前記走行方法決定部は、前記車両用部品の体積または数が前記第二閾値以上である場合に、前記車両を停止すると判定し、前記車両用部品の体積または数が前記第二閾値未満である場合に、前記目的地を修理工程に変更する、
異常検出装置。
【請求項9】
請求項4に記載の異常検出装置であって、
前記走行方法決定部は、検出された前記走路の異物に関する情報を用いて、さらに、前記走路の異物が検出された後に走行する後続車両の走行可否と、前記後続車両を走行させる後続走行経路と、の少なくともいずれかを含む後続走行方法を決定する、
異常検出装置。
【請求項10】
請求項9に記載の異常検出装置であって、
前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の種類を特定し、
前記走行方法決定部は、特定された前記液体の種類を用いて、前記後続走行方法を決定する、
異常検出装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常検出装置、検出装置、および車両に関する。
続きを表示(約 8,800 文字)
【背景技術】
【0002】
例えば、特許文献1には、車両を製造するための製造システムにおいて、遠隔制御によって、車両を製造システムの組立ラインの終端から製造システムの駐車場まで走行させる車両走行方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2017-538619号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両の走路や車両の周囲に異物が存在すると、無人運転による車両の走行が妨げられる可能性がある。また、車両に取り付けられる部品が適切に取り付けられなければ製品としての車両の品質が低下する可能性がある。そのため、車両の走路の物標、車両の周囲の物標、車両に取り付けられる物標などにおける異常を検知するための技術が望まれている。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
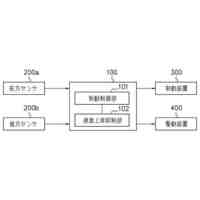
(1)本開示の一形態によれば、異常検出装置が提供される。この異常検出装置は、無人運転により走行可能な車両の走路の物標、前記車両の周囲の物標、および前記車両に取り付けられた物標のうち少なくともいずれか一つの物標を検出可能な検出装置による前記少なくともいずれか一つの物標の検出結果を解析して、異常を検出する異常検出部と、前記異常が検出された場合に、前記異常が検出されなかった場合とは異なる信号を出力する出力部と、を備える。
この形態の異常検出装置によれば、車両の走路の物標、車両の周囲の物標、および車両に取り付けられた物標による異常を検出し、無人運転による車両の走行が妨げられることを抑制または防止することができる。
(2)上記形態の異常検出装置において、前記検出装置は、前記いずれか一つの物標とともに、さらに、前記車両の画像および前記車両の3次元点群データのいずれかを検出してよい。
この形態の異常検出装置によれば、検出装置を物標の検出と、車両の画像および車両の3次元点群データのいずれかの検出とに利用することによって、専用の検出器を新たに設けることなく車両の走路の物標、車両の周囲の物標、および車両に取り付けられた物標による異常を検出することができる。
(3)上記形態の異常検出装置において、前記検出装置は、前記走路の物標を検出してもよい。前記異常検出部は、前記検出装置による前記走路の物標の検出結果を解析した解析結果が、前記走路の物標が異物であると判定するための予め定められた条件を満たす場合に、前記走路の異物を前記異常として検出してよい。
この形態の異常検出装置によれば、車両の走路の物標による異常を検出し、無人運転による車両の走行が妨げられることを抑制または防止することができる。
(4)上記形態の異常検出装置において、さらに、検出された前記異物に関する情報を用いて、前記車両の走行可否と、前記車両を向かわせる目的地の変更と、の少なくともいずれかを含む走行方法を決定する走行方法決定部、を備えてよい。
この形態の異常検出装置によれば、検出された異物に応じた適正な車両の走行方法を決定することができる。
(5)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の種類を特定してよい。前記走行方法決定部は、特定された前記液体の種類を用いて、前記走行方法を決定してよい。
この形態の異常検出装置によれば、異物が液体である場合に、液体の種類に応じた適正な車両の走行方法を決定することができる。
(6)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の量が予め定められた第一閾値以上か否かを判定してよい。前記走行方法決定部は、前記液体の量が前記第一閾値以上である場合に、前記車両を停止すると判定し、前記液体の量が前記第一閾値未満である場合に、前記目的地を修理工程に変更してよい。
この形態の異常検出装置によれば、異物が液体である場合に、液体の量が車両の走行に与える影響に応じた適正な車両の走行方法を決定することができる。
(7)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が前記車両の車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品であると判定した場合に、さらに前記車両用部品の種類を特定してよい。前記走行方法決定部は、特定された前記車両用部品の種類を用いて、前記走行方法を決定してよい。
この形態の異常検出装置によれば、異物が車両用部品である場合に、車両用部品の種類に応じた適正な車両の走行方法を決定することができる。
(8)前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が前記車両の車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品であると判定された場合に、さらに、前記車両用部品の体積または数が予め定められた第二閾値以上か否かを判定してよい。前記走行方法決定部は、前記車両用部品の体積または数が前記第二閾値以上である場合に、前記車両を停止すると判定し、前記車両用部品の体積または数が前記第二閾値未満である場合に、前記目的地を修理工程に変更してよい。
この形態の異常検出装置によれば、異物が車両用部品である場合に、車両部品の体積または数が車両の走行に与える影響に応じた適正な車両の走行方法を決定することができる。
(9)上記形態の異常検出装置において、前記走行方法決定部は、検出された前記走路の異物に関する情報を用いて、さらに、前記走路の異物が検出された後に走行する後続車両の走行可否と、前記後続車両を走行させる後続走行経路と、の少なくともいずれかを含む後続走行方法を決定してよい。
この形態の異常検出装置によれば、検出された異物に応じた適正な後続車両の走行方法を決定することができる。
(10)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の種類を特定してよい。前記走行方法決定部は、特定された前記液体の種類を用いて、前記後続走行方法を決定してよい。
この形態の異常検出装置によれば、異物が液体である場合に、液体の種類に応じた適正な後続車両の走行方法を決定することができる。
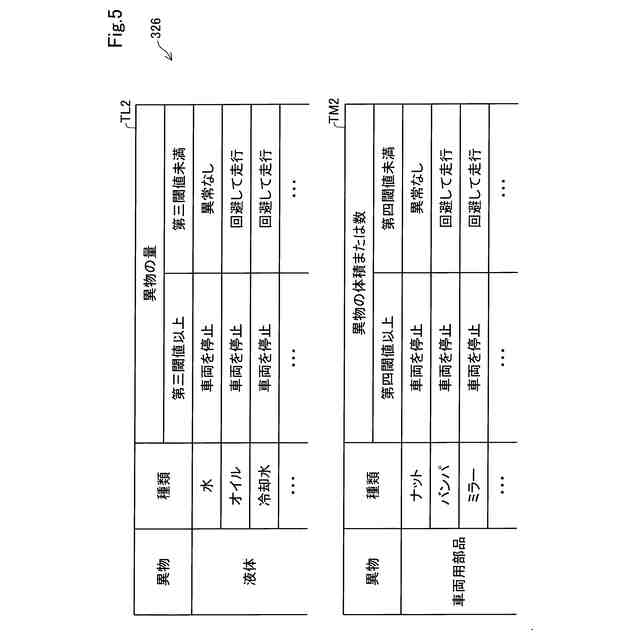
(11)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が液体であるか否かを判定し、前記走路の異物が液体である場合には、さらに前記液体の量が予め定められた第三閾値以上か否かを判定してよい。前記走行方法決定部は、前記液体の量が前記第三閾値以上である場合に、前記後続車両を停止すると判定し、前記液体の量が前記第三閾値未満である場合に、前記後続走行経路を、前記後続車両が前記液体を回避するための後続走行経路へと変更してよい。
この形態の異常検出装置によれば、異物が液体である場合に、液体の量が後続車両の走行に与える影響に応じた適正な後続車両の走行方法を決定することができる。
(12)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品であると判定した場合に、さらに前記車両用部品の種類を特定してよい。前記走行方法決定部は、特定された前記車両用部品の種類を用いて、前記後続走行方法を決定してよい。
この形態の異常検出装置によれば、異物が車両用部品である場合に、車両用部品の種類に応じた適正な後続車両の走行方法を決定することができる。
(13)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記走路の異物が車両用部品であるか否かを判定し、前記走路の異物が前記車両用部品と判定された場合に、さらに、前記車両用部品の体積または数が予め定められた第四閾値以上か否かを判定してよい。前記走行方法決定部は、前記車両用部品の体積または数が前記第四閾値以上である場合に、前記後続車両を停止すると判定し、前記車両用部品の体積または数が前記第四閾値未満である場合に、前記後続車両の走行経路を、前記後続車両が前記車両用部品を回避するための後続走行経路へと変更してよい。
この形態の異常検出装置によれば、異物が車両用部品である場合に、車両部品の体積または数が後続車両の走行に与える影響に応じた適正な後続車両の走行方法を決定することができる。
(14)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、前記走路の異物の検出位置および検出タイミングを抽出し、抽出された前記検出位置および前記検出タイミングを用いて、前記走路の異物が前記車両に備えられていた物品であるか否かを判定してよい。
この形態の異常検出装置によれば、異物が車両に備えられていた物品であるか否かの判定により、車両が異物に関する不具合を有しているか否かを推定することができる。
(15)上記形態の異常検出装置において、前記走路の異物が前記車両に備えられていた物品であると判定した場合に、前記走行方法決定部は、前記目的地を修理工程に変更してよい。
この形態の異常検出装置によれば、車両を早期に修理工程に走行させることができる。
(16)上記形態の異常検出装置において、前記検出装置は、前記車両の周囲の物標を検出してもよい。前記異常検出部は、前記検出装置による前記車両の周囲の物標の検出結果を解析して、前記車両の周囲の物標が前記車両に接触した接触物であると判定するための予め定められた条件を満たす場合に、前記接触物を前記異常として検出してよい。
この形態の異常検出装置によれば、車両の周囲の物標による異常を検出し、無人運転による車両の走行が妨げられることを抑制または防止することができる。
(17)上記形態の異常検出装置において、さらに、検出された前記接触物に関する情報を用いて、前記車両の走行可否と、前記車両を向かわせる目的地と、の少なくともいずれかを含む走行方法を決定する走行方法決定部、を備えてよい。
この形態の異常検出装置によれば、検出された接触物に応じた適正な車両の走行方法を決定することができる。
(18)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記接触物の種類を識別してよい。前記走行方法決定部は、識別された前記接触物の種類を用いて、前記走行方法を決定してよい。
この形態の異常検出装置によれば、接触物の種類に応じた適正な車両の走行方法を決定することができる。
(19)上記形態の異常検出装置において、前前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記接触物が前記車両に接触する際の速度を取得してよい。前記走行方法決定部は、取得された前記接触物の速度を用いて、前記走行方法を決定してよい。
この形態の異常検出装置によれば、接触物の速度から推定される車両への影響に応じた適正な車両の走行方法を決定することができる。
(20)上記形態の異常検出装置において、前記異常検出部は、前記検出装置の検出結果を解析して、さらに、検出された前記接触物の体積、または検出された前記接触物の質量を取得してよい。前記走行方法決定部は、取得された前記体積または前記質量を用いて、前記走行方法を決定してよい。
この形態の異常検出装置によれば、接触物の体積から推定される車両への影響に応じた適正な車両の走行方法を決定することができる。
(21)上記形態の異常検出装置において、さらに、前記車両に対する前記接触物の接触による前記車両の異常を検出する車両異常検出部を備えてよい。前記異常検出部は、前記車両における前記接触物の接触位置を特定してよい。前記車両異常検出部は、特定された前記接触位置を解析して、前記接触位置における前記車両の異常を検出してよい。
この形態の異常検出装置によれば、接触物の有無に加えて、接触物によって発生した車両の異常を検出することができる。
(22)上記形態の異常検出装置は、さらに、検出された前記車両の異常に関する情報を用いて、前記車両の走行可否と、前記車両を向かわせる目的地と、の少なくともいずれかを含む走行方法を決定する走行方法決定部、を備えてよい。
この形態の異常検出装置によれば、車両に発生した異常に応じた適正な車両の走行方法を決定することができる。
(23)上記形態の異常検出装置において、前記走行方法決定部は、検出された前記接触物に関する情報を用いて、さらに、前記接触物が検出された後に走行する後続車両の走行可否と、前記後続車両を走行させる後続走行経路と、の少なくともいずれかを含む後続走行方法を決定してよい。
この形態の異常検出装置によれば、車両を、車両の走路に残存し得る接触物に応じて適正に走行させることができる。
(24)上記形態の異常検出装置において、前記接触物検出部は、前記接触物を検出した場合に、前記接触物の撤去を促すための報知を行ってよい。
この形態の異常検出装置によれば、早期に接触物を撤去させることにより、接触物が検出した後に走行する車両の走行経路が、接触物を検出しない場合の走行経路とは異なる走行経路へと変更されることを抑制することができる。
(25)上記形態の異常検出装置において、前記検出装置は、前記車両に取り付けられた物標を検出してもよい。前記異常検出部は、前記検出装置による前記車両に取り付けられた物標の検出結果を解析した解析結果が、前記車両に取り付けられた物標が前記車両に適正に取り付けられていると判定するための予め定められた条件を満たす場合に、前記物標が前記車両に適正に取り付けられていないことを前記異常として検出してよい。
この形態の異常検出装置によれば、車両に取り付けられた物標による異常を検出し、無人運転による車両の走行が妨げられることを抑制または防止することができる。
【図面の簡単な説明】
【0007】
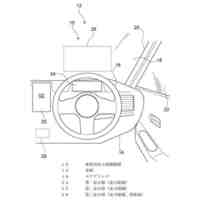
第1実施形態の異常検出装置を含む遠隔自動運転システムの概略構成を示す説明図。
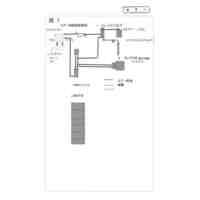
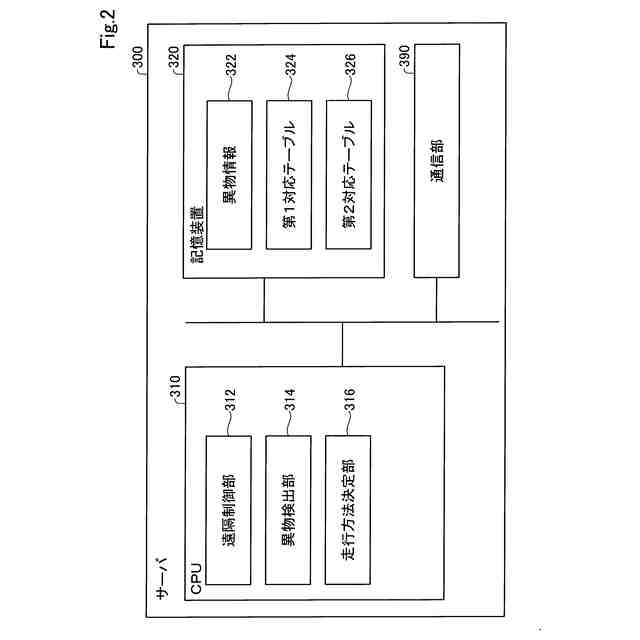
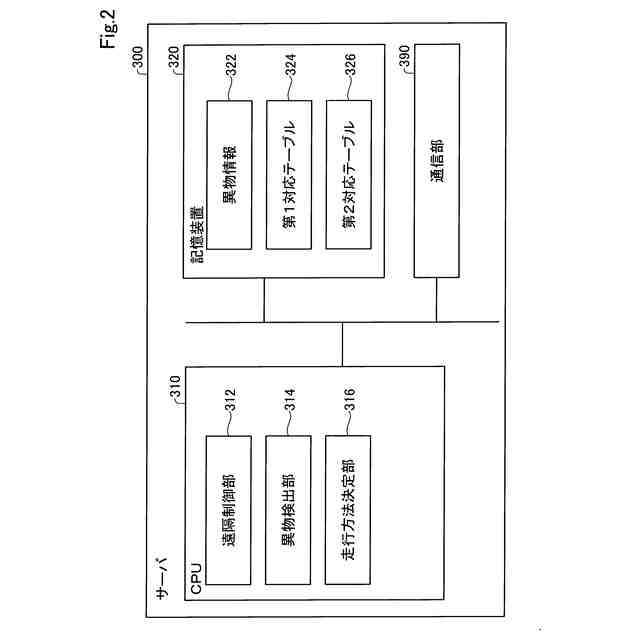
サーバの内部機能構成を示すブロック図。
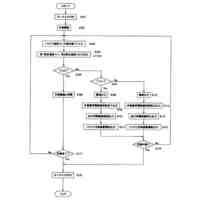
サーバによって実現される車両の走行方法を示すフローチャート。
遠隔制御部の遠隔制御による車両の自動運転制御の概要を示す説明図。
第1対応テーブルの一例を示す説明図。
第2対応テーブルの一例を示す説明図。
異物の一例としてのオイルを後続車両が回避して走行する様子を示す説明図。
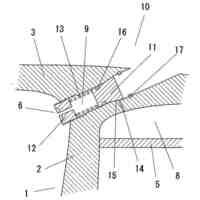
異物が車両に備えられていた物品であるか否かを特定する方法を示す説明図。
第1実施形態にかかる車両の製造方法を示す第1のフローチャート。
第1実施形態にかかる車両の製造方法を示す第2のフローチャート。
後続走行方法決定処理の処理ルーチンを示すフローチャート。
第2実施形態にかかる異常検出装置を含む遠隔自動運転システムが備えるカメラの内部機能構成を示すブロック図。
第2実施形態にかかる遠隔自動運転システムが備えるサーバの内部機能構成を示すブロック図。
第3実施形態に係る異常検出装置を含む遠隔自動運転システムの概略構成を示す説明図。
サーバの内部機能構成を示すブロック図。
対応テーブルの一例を示す説明図。
第4実施形態に係る異常検出装置が実行する車両の走行方法決定処理の処理ルーチンを示すフローチャート。
第4実施形態に係る異常検出装置が実行する車両の走行方法決定処理の処理ルーチンを示すフローチャート。
第4実施形態の異常検出装置が有する対応テーブルの概要を示す説明図。
第5実施形態に係る異常検出装置としてのサーバの内部機能構成を示すブロック図。
第5実施形態に係るサーバが実行する車両の走行方法決定処理の処理ルーチンを示すフローチャート。
車両に対する接触物の接触位置を特定する方法を示す第1の説明図。
車両異常検出部による車両の異常の種類の特定方法を示す説明図。
車両に対する接触物の接触位置を特定する方法を示す第2の説明図。
第5実施形態に係る異常検出装置を含む遠隔自動運転システムが有する対応テーブルの概要を示す説明図。
第6実施形態にかかるカメラの内部機能構成を示すブロック図。
第6実施形態にかかるサーバの内部機能構成を示すブロック図。
第7実施形態の異常検出装置を含む遠隔自動運転システムの概略構成を示す説明図。
サーバの内部機能構成を示すブロック図。
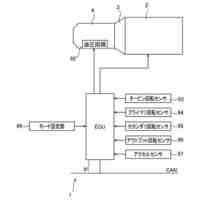
第8実施形態に係る車両のECUの機能構成を示すブロック図。
第8実施形態の車両の走行方法を示すフローチャート。
【発明を実施するための形態】
【0008】
A.第1実施形態:
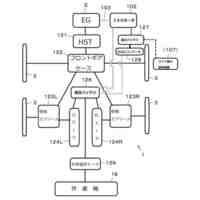
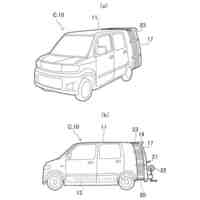
図1は、第1実施形態の異常検出装置を含む遠隔自動運転システム500の概略構成を示す説明図である。遠隔自動運転システム500は、遠隔制御によって、車両100を製造する工場FC内の製造過程で車両100を自動走行させる。車両100は、例えば、乗用車、トラック、バス、ならびに工事用車両などである。本実施形態では、車両100は、無人運転により走行可能な電気自動車(BEV:Battery Electric Vehicle)である。「無人運転」とは、搭乗者の運転操作によらない運転を意味する。運転操作とは、車両の「走る」、「曲がる」、「止まる」の少なくともいずれかに関する操作を意味する。無人運転は、車両の外部に設けられた装置を用いた自動・手動の遠隔制御、または、車両の自律制御によって実現される。無人運転によって走行している車両には、運転操作を行わない搭乗者が搭乗していてもよい。運転操作を行わない搭乗者には、例えば、単に車両の座席に着座している者や、組み付け、検査、スイッチ類の操作といった運転操作とは異なる作業を車両に乗りながら行っている人が含まれる。なお、搭乗者の運転操作による運転は、「有人運転」と呼ばれることがある。本明細書では、製品として完成した状態と、製造途中の半製品・仕掛品の状態とを総じて「車両」と呼ぶ。
【0009】
図1に示すように、工場FCには、前工程50と、後工程60と、車両100の走路RTとが備えられている。走路RTは、前工程50と後工程60とを繋ぐ工場FC内の車両100の搬送区間である。なお、工場FCは、1つの建物である場合や、1箇所の敷地や住所に存在する場合などには限定されず、例えば、製造過程における各工程が複数の建物、複数の敷地、複数の住所等に亘って存在してもよい。「工場FC内」には、車両100が完成してから、完成した車両100が出荷のために荷積みされる待機場所までの範囲も含まれる。「車両100が工場FC内を走行する」とは、車両100が、走路RTなど、複数の場所に存在する工程間の搬送区間を走行する場合と、工程内を走行する場合とを含み、例えば、車両100が複数の場所に存在する工場の間を移動するために、私道に限らず工場の間の公道を走行する場合を含む。
【0010】
前工程50は、例えば、車体に部品を組み付ける組み立て工程である。後工程60は、例えば、車両100の検査工程である。前工程50から払い出された車両100は、後工程60の仕掛品となり、遠隔制御によって走行先である後工程60へと走路RTを走行する。後工程60に到着した車両100は、投入許可が得られると後工程60に投入される。車両100は、後工程60としての検査工程を終えると製品として完成され、出荷を待機するための工場FC内の待機場所へと走行する。その後、車両100は、車両100ごとに対応する出荷先へと出荷される。なお、前工程50および後工程60は、組み立て工程や検査工程に限らず、前工程50および後工程60による処理後の車両100が遠隔制御によって走行可能であることを前提に種々の工程を採用することができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社プロテリアル
金属成形体の製造方法
2日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両運転支援装置
2日前
トヨタ自動車株式会社
車両に搭載されたマネージャ
2日前
トヨタ自動車株式会社
二次電池及び二次電池システム
2日前
トヨタ自動車株式会社
活物質、電池およびこれらの製造方法
2日前
トヨタ自動車株式会社
車両用表示制御装置、表示方法及びプログラム
2日前
個人
車両用エアー傘
3か月前
個人
電池交換式自動車
2か月前
個人
自動車盗難防止装置
3か月前
個人
荷台雨除け装置
3か月前
個人
空気圧調節式ホイール。
10日前
日本精機株式会社
表示システム
1か月前
個人
全自動解除式シートベルト
3か月前
東レ株式会社
車両用エアバッグ
23日前
個人
移動手段のミラーカバー。
2か月前
日本精機株式会社
運転支援装置
1か月前
個人
連結式、キャンピングカー
2か月前
日本精機株式会社
車外表示装置
2日前
井関農機株式会社
作業車両
3か月前
個人
車両の座席装置
2か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
ダイハツ工業株式会社
車両
9日前
ダイハツ工業株式会社
車両
10日前
株式会社SUBARU
車両
3日前
個人
セパレート型キャンピングカー
3か月前
株式会社コーワ
フィルター清掃装置
3か月前
個人
テーブル付きハンドルガード具
3か月前
スズキ株式会社
車両制御装置
1か月前
豊田合成株式会社
車両
23日前
豊田合成株式会社
車両
23日前
アピオ株式会社
荷物用支持具
2か月前
エムケー精工株式会社
車両処理装置
13日前
日本化薬株式会社
ガス発生器
2日前
日本化薬株式会社
ガス発生器
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ