TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143460
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056159
出願日
2023-03-30
発明の名称
信号処理装置、信号処理方法、及びプログラム
出願人
日本電気株式会社
代理人
個人
主分類
G01S
13/90 20060101AFI20241003BHJP(測定;試験)
要約
【課題】メモリ消費量や信号処理量の増加を抑制する。
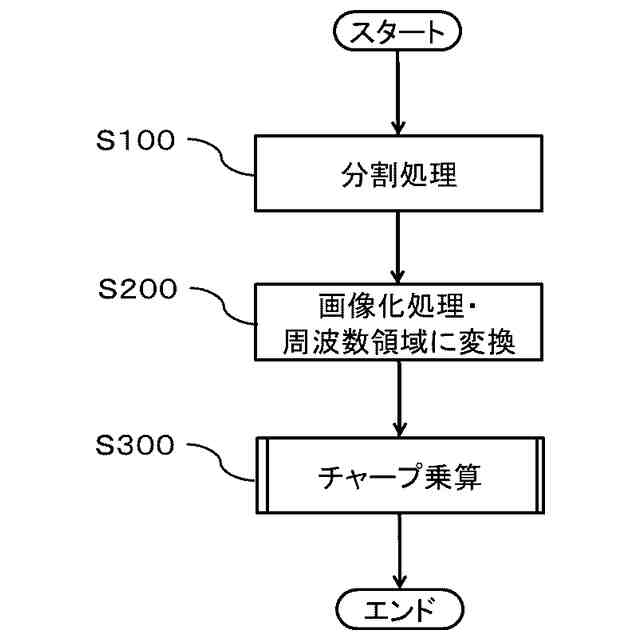
【解決手段】信号処理装置1は、分割処理部10と画像処理部20とチャープ乗算部30とを備えている。分割処理部10は、反射信号を所定の時間間隔で分割処理する。画像処理部20は、分割された後の信号データを用いて、第1座標系において画像化処理を実行する。第1座標系は、一方の軸が、飛翔体が照射するレーダーが散乱体を通過する時間を表す第1軸であり、他方の軸が、飛翔体がレーダーを照射する照射方向における飛翔体から散乱体までの時間又は距離を表す第2軸である。画像処理部20により処理されて得られた第1信号データは、一方の軸が、第1軸の周波数領域に係る第3軸であり、他方の軸が第2軸の周波数領域に係る第4軸であるデータを含む。チャープ乗算部30は、第1軸又は第3軸に係るチャープ関数を第1信号データに乗算する。チャープ乗算部30は、第3軸に係る回り込みによる影響を除去してチャープ関数を乗算する。
【選択図】図9
特許請求の範囲
【請求項1】
飛翔体から照射されるレーダーに対する散乱体からの反射を表す反射信号を、所定の時間間隔で分割処理する分割処理手段と、
前記分割処理手段により分割された後の信号データを用いて、第1座標系において画像化処理を実行する画像処理手段と、を備え、
前記第1座標系は、一方の軸が、前記飛翔体が照射するレーダーが前記散乱体を通過する時間を表す第1軸であり、他方の軸が、前記飛翔体が前記レーダーを照射する照射方向における前記飛翔体から前記散乱体までの時間又は距離を表す第2軸であって、
前記照射方向は、前記飛翔体の進行方向と前記照射方向とで定義される面内において前記進行方向に垂直な方向に対して斜めに傾斜しており、
前記画像処理手段により処理されて得られた第1信号データは、一方の軸が、前記第1軸の周波数領域に係る第3軸であり、他方の軸が前記第2軸の周波数領域に係る第4軸であるデータを含み、
前記第1軸又は前記第3軸に係るチャープ関数を前記第1信号データに乗算するチャープ乗算手段をさらに備え、
前記チャープ乗算手段は、前記第3軸に係る回り込みによる影響を除去して前記チャープ関数を乗算する、信号処理装置。
続きを表示(約 1,500 文字)
【請求項2】
請求項1に記載の信号処理装置において、
前記分割処理手段は、PRF(Pulse Repetition Frequency)と、前記反射信号の、アジマス周波数の帯域幅との差を用いて、前記所定の時間間隔の幅を設定する、信号処理装置。
【請求項3】
請求項1又は2に記載の信号処理装置において、
前記チャープ乗算手段により処理されて得られた第2信号データのうち、前記第1座標系に基づいている第3信号データを取得し、前記第3信号データを、前記第1座標系とは異なる第2座標系に基づいている第4信号データに、前記チャープ乗算手段により処理された影響を除去してから変換する座標系変換手段をさらに備え、
前記第2座標系は、一方の軸が前記飛翔体と前記散乱体との距離が最も近づいたときの時間を表す軸であり、他方の軸が前記進行方向に前記垂直な方向における前記飛翔体から前記散乱体までの距離又は時間を表す軸である、信号処理装置。
【請求項4】
請求項1又は2に記載の信号処理装置において、
前記チャープ乗算手段により処理されて得られた第2信号データに紐づく画素データの位置情報を、前記チャープ乗算手段により処理された影響を除去してから、地球上での位置情報に変換する位置情報変換手段をさらに備える、信号処理装置。
【請求項5】
1つ以上のコンピュータが、
飛翔体から照射されるレーダーに対する散乱体からの反射を表す反射信号を、所定の時間間隔で分割処理し、
分割された後の信号データを用いて、第1座標系において画像化処理を実行し、
前記第1座標系は、一方の軸が、前記飛翔体が照射するレーダーが前記散乱体を通過する時間を表す第1軸であり、他方の軸が、前記飛翔体が前記レーダーを照射する照射方向における前記飛翔体から前記散乱体までの時間又は距離を表す第2軸であって、
前記照射方向は、前記飛翔体の進行方向と前記照射方向とで定義される面内において前記進行方向に垂直な方向に対して斜めに傾斜しており、
画像化処理されて得られた第1信号データは、一方の軸が、前記第1軸の周波数領域に係る第3軸であり、他方の軸が前記第2軸の周波数領域に係る第4軸であるデータを含み、
前記第1軸又は前記第3軸に係るチャープ関数を前記第1信号データに乗算し、
前記第3軸に係る回り込みによる影響を除去して前記チャープ関数を乗算する、信号処理方法。
【請求項6】
1つ以上のコンピュータに、
飛翔体から照射されるレーダーに対する散乱体からの反射を表す反射信号を、所定の時間間隔で分割処理する手順、
分割された後の信号データを用いて、第1座標系において画像化処理を実行する手順、
前記第1座標系は、一方の軸が、前記飛翔体が照射するレーダーが前記散乱体を通過する時間を表す第1軸であり、他方の軸が、前記飛翔体が前記レーダーを照射する照射方向における前記飛翔体から前記散乱体までの時間又は距離を表す第2軸であって、
前記照射方向は、前記飛翔体の進行方向と前記照射方向とで定義される面内において前記進行方向に垂直な方向に対して斜めに傾斜しており、
画像化処理されて得られた第1信号データは、一方の軸が、前記第1軸の周波数領域に係る第3軸であり、他方の軸が前記第2軸の周波数領域に係る第4軸であるデータを含み、
前記第1軸又は前記第3軸に係るチャープ関数を前記第1信号データに乗算する手順、
前記第3軸に係る回り込みによる影響を除去して前記チャープ関数を乗算する手順、を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、信号処理装置、信号処理方法、及びプログラムに関する。
続きを表示(約 740 文字)
【背景技術】
【0002】
サブアパチャに分割する処理、及びチャープ関数を乗算する処理を含む、SAR画像に関する技術が、特許文献1に開示されている。
【0003】
SARセンサが移動する場合であっても、アジマスアンビギュイティが発生していないSAR画像を再生することができる技術が、特許文献2に開示されている。
【0004】
空中写真などの画像から建物の壁面座標を取得し、この壁面上の点群を利用して建物の輪郭を抽出しつつ数値表層モデルを作成する技術が、特許文献3に開示されている。
【0005】
ドップラー周波数の変位差分量がPRFの半分よりも大きい観測点の数を減らせることができるレーダー信号処理装置に関する技術が、特許文献4に開示されている。
【0006】
ハイスクイントでのSAR画像の生成に関する技術が、特許文献5に開示されている。
【0007】
SAR画像の生成手法におけるBaseband Azimuth Scalingに関する技術が、非特許文献1に開示されている。
【0008】
SAR画像の生成手法におけるOmega-K Algorithmに関する技術が、非特許文献2に開示されている。
【0009】
SAR画像の生成手法におけるSVD-Stoltに関する技術が、非特許文献3に開示されている。
【0010】
SAR画像の生成手法におけるExtended Wavenumber domainに関する技術が、非特許文献4に開示されている。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流検出器
17日前
甲神電機株式会社
漏電検出器
17日前
株式会社大真空
センサ
12日前
甲神電機株式会社
電流センサ
17日前
ユニパルス株式会社
ロードセル
11日前
株式会社高橋型精
採尿具
18日前
東レ株式会社
液体展開用シート
4日前
株式会社トプコン
測量装置
17日前
アズビル株式会社
熱式流量計
18日前
株式会社トプコン
植物センサ
今日
キヤノン電子株式会社
サーボ加速度計
4日前
キヤノン電子株式会社
サーボ加速度計
4日前
株式会社クボタ
作業車両
3日前
キヤノン電子株式会社
サーボ加速度計
4日前
日本特殊陶業株式会社
ガスセンサ
18日前
豊田合成株式会社
表示装置
17日前
シャープ株式会社
収納装置
18日前
トヨタ自動車株式会社
画像検査装置
12日前
株式会社東京久栄
水中移動体用採水器
18日前
ローム株式会社
MEMSデバイス
18日前
株式会社島津製作所
ガスクロマトグラフ
24日前
株式会社大真空
センサ及びその製造方法
11日前
TDK株式会社
温度センサ
18日前
横河電機株式会社
光源装置
18日前
株式会社トーキン
電流センサ
3日前
株式会社テクノメデイカ
採血分注システム
17日前
三菱電機株式会社
振動センサ
今日
公立大学法人大阪
蛍光X線分析装置
12日前
矢崎総業株式会社
サーミスタ
4日前
ローム株式会社
MEMS装置
24日前
タカハタプレシジョン株式会社
水道メータ
24日前
岡谷精立工業株式会社
ひずみ測定装置
12日前
三菱電機株式会社
信号処理器及びレーダ装置
3日前
株式会社日本マイクロニクス
プローブ
11日前
株式会社ミツトヨ
画像測定機及びプログラム
3日前
ミネベアミツミ株式会社
位置判定装置
24日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ