TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024130537
公報種別
公開特許公報(A)
公開日
2024-09-30
出願番号
2023040327
出願日
2023-03-15
発明の名称
車両システムの振動抑制制御装置及び振動抑制制御方法
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
23/04 20060101AFI20240920BHJP(電力の発電,変換,配電)
要約
【課題】バックラッシュ制御の演算を簡素化して処理時間の短縮化と共にトルクの変化率が緩やかな場合でもバックラッシュ期間の終了タイミングの過渡軸トルクを超過させない機能の簡素化を図る。
【解決手段】モータの推定軸トルクに基づき前記車両システムのバックラッシュ期間を設定すると共にこのバックラッシュ期間中のトルク指令を出力するバックラッシュ制御にあたり、初期軸トルクの変化率または車両システムのギヤ間の初期相対速度に応じて前記モータのトルクレベルの出力時間を設定してトルクレベルの出力時間とバックラッシュ期間を演算する。そして、前記トルクレベルと前記バックラッシュ制御の開始からの当該トルクレベルの出力時間に基づきバックラッシュ期間中のトルク指令値を生成する。そして、前記バックラッシュ期間中に前記生成された前記バックラッシュ期間中のトルク指令値をモータのトルクとして設定する。
【選択図】図7
特許請求の範囲
【請求項1】
モータを駆動源とする車両システムの振動抑制制御装置であって、
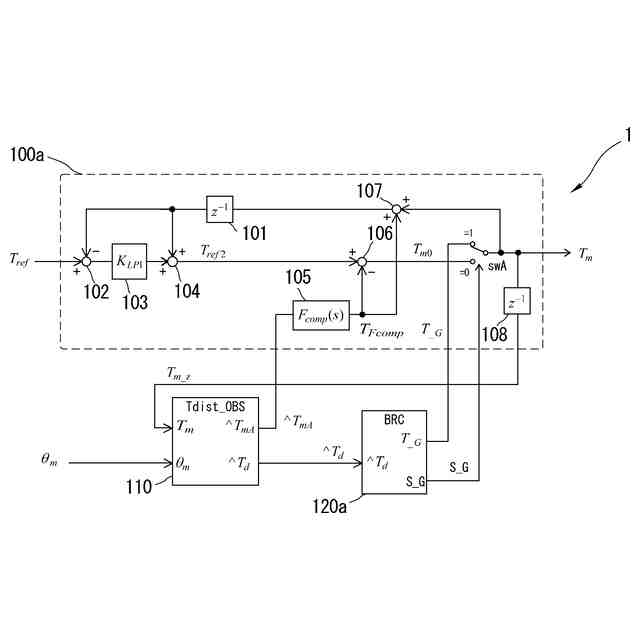
モータの入力トルク指令に基づきモータトルクTmを出力する振動抑制補償部と、
前記モータの位相と前記モータトルクTmとに基づき推定モータ加速トルクと当該モータの推定軸トルクとを出力する外乱トルクオブザーバと、
前記推定軸トルクに基づき前記車両システムのバックラッシュ期間を設定すると共にこのバックラッシュ期間中のトルク指令を出力するバックラッシュ制御部と、
を備え、
前記外乱トルクオブザーバは、車両プラントモデルによる推定モータ角速度^ωm_LPと実モータ検出角速度ωm_LPとの差分に基づいて推定外乱トルク^Tdistを推定し、
前記バックラッシュ制御部は、
前記推定軸トルクを監視して零クロスするタイミングをバックラッシュ制御の開始タイミングとして検出し、当該推定軸トルクの時間変化率の絶対値成分と、この絶対値成分をばね定数で除したものを推定軸ねじり速度として算出し、当該絶対値成分を初期軸トルクの変化率sTd0としてラッチし、当該推定軸ねじり速度を前記車両システムのギヤ間の初期相対速度ωg0としてラッチするバックラッシュ期間開始検出部と、
前記初期軸トルクの変化率sTd0または前記初期相対速度ωg0に応じて前記モータのトルクレベル(TGH,TGL)の出力時間(ΔtgH,ΔtgL)を設定し、トルクレベルTGHの出力期間Δt_GH(=ΔtgH)とバックラッシュ期間Δt_G(=ΔtgH+ΔtgL)を演算するバックラッシュ期間演算部と、
前記バックラッシュ制御の開始タイミングから当該トルクレベルの出力期間及び当該バックラッシュ期間まで経過する期間の信号(S_GH,S_G)を生成するバックラッシュ制御信号生成部と、
前記トルクレベル(TGH,TGL)と前記バックラッシュ制御の開始トリガからトルクレベルTGHの出力時間の信号(S_GH)とに基づいてバックラッシュ期間中のトルク指令値T_Gを生成する、バックラッシュ期間中のトルク生成部を備え、
前記振動抑制補償部は、前記バックラッシュ期間中に前記生成された前記バックラッシュ期間中のトルク指令値T_Gを前記モータトルクTmとして設定することを特徴とする振動抑制制御装置。
続きを表示(約 6,700 文字)
【請求項2】
前記バックラッシュ期間演算部は、
2種類のトルクレベルを出力する時間成分であるΔtgH,ΔtgLにより、「ΔtgH=0,ΔtgL≠0」「ΔtgH≠0,ΔtgL≠0」「ΔtgH≠0,ΔtgL=0」の3種類のモードに分類し、
「前記初期相対速度ωg0>制限速度ωgLim」であれば、最初の「ΔtgH=0,ΔtgL≠0」のモードと判別し、(18)式よりΔtgLを計算し、ΔtgH=0の設定を行い、
TIFF
2024130537000046.tif
37
166
但し、
ΔtgL:トルクレベルTGL=0の出力時間
θBL:バックラッシュ位相
ωg0:車両システムのギヤ間の初期相対速度
ΔtgH:トルクレベルTGHの出力時間
「前記初期相対速度ωg0≦制限速度ωgLim」であれば、「ΔtgH≠0,ΔtgL≠0」のモードを計算し、(20)式にてΔtgHを、(21)式によりΔtgHの出力時間経過後のギヤ間の相対位相であるガタ位相θgの変化量ΔθgH」を、(23)式によりΔtgLを計算し、
TIFF
2024130537000047.tif
37
166
但し、
ΔtgH:トルクレベルTGHの出力時間
Jm:モータの慣性モーメント
TgH:トルクレベルTGHでのモータのトルク
ωgLim:制限速度
ωg0:車両システムのギヤ間の初期相対速度
TIFF
2024130537000048.tif
37
166
但し、
ΔθgH:ガタ位相θgの変化量
ωg0:車両システムのギヤ間の初期相対速度
TgH:トルクレベルTGHでのモータのトルク
Jm:モータの慣性モーメント
t:時間
ΔtgH:トルクレベルTGHの出力時間
TIFF
2024130537000049.tif
37
166
但し、
ΔtgL:トルクレベルTGL=0の出力時間
θBL:バックラッシュ位相
ΔθgH:ガタ位相θgの変化量
ωgLim:制限速度
「ガタ位相θgの変化量ΔθgH>バックラッシュ位相θBL」であれば、「ΔtgH≠0,ΔtgL≠0」のモードと判別し、前記算出したΔtgHとΔtgLを制御時間として設定して時間計算し、それ以外の場合は「ΔtgH≠0,ΔtgL=0」のモードと判別して、(26)式によりΔtgHを再計算し、「ΔtgL=0」の設定を行うこと
を特徴とする請求項1に記載の振動抑制制御装置。
【請求項3】
前記バックラッシュ期間演算部において、
初期演算過程では、
「前記初期相対速度ωg0>制限速度ωgLim」であれば、最初の「ΔtgH=0,ΔtgL≠0」のモードと判別し、(18)式よりΔtgLを計算し、ΔtgH=0の設定を行う処理Aと、
TIFF
2024130537000050.tif
37
166
但し、
ΔtgL:トルクレベルTGL=0の出力時間
θBL:バックラッシュ位相
ωg0:車両システムのギヤ間の初期相対速度
ΔtgH:トルクレベルTGHの出力時間
「前記初期相対速度ωg0≦制限速度ωgLim」であれば、「ΔtgH≠0,ΔtgL≠0」のモードを計算し、(20)式にてΔtgHを、(21)式にてΔtgH時間経過後のガタ位相θgの変化量ΔθgHを、(23)式にてΔtgLを計算すると共に、バックラッシュ期間における初期相対速度ωg0からの増速量Δωgを(24)式により計算する処理Bと、
TIFF
2024130537000051.tif
37
166
但し、
ΔtgH:トルクレベルTGHの出力時間
Jm:モータの慣性モーメント
TgH:トルクレベルTGHでのモータのトルク
ωgLim:制限速度
ωg0:車両システムのギヤ間の初期相対速度
TIFF
2024130537000052.tif
37
166
但し、
ΔθgH:ガタ位相の変化量
ωg0:車両システムのギヤ間の初期相対速度
TgH:トルクレベルTGHでのモータのトルク
Jm:モータの慣性モーメント
t:時間
ΔtgH:トルクレベルTGHの出力時間
TIFF
2024130537000053.tif
37
166
但し、
ΔtgL:トルクレベルTGL=0の出力時間
θBL:バックラッシュ位相
ΔθgH:ガタ位相の変化量
ωgLim:制限速度
TIFF
2024130537000054.tif
37
166
但し、
Δωg:バックラッシュ期間における車両システムのギヤ間の初期相対速度ωg0からの増速量
ωgLim:制限速度
ωg0:車両システムのギヤ間の初期相対速度
「前記ガタ位相の変化量ΔθgH>バックラッシュ位相θBL」であれば「ΔtgH≠0,ΔtgL≠0」のモードと判別して、処理Bで得られたΔtgHとΔtgLを制御時間、Δωgを増速量として設定し、
「前記ガタ位相の変化量ΔθgH≦バックラッシュ位相θBL」であれば、「ΔtgH≠0,ΔtgL=0」のモードと判別して、(26)式にてΔtgHを計算し、「ΔtgL=0」の設定を行うと共に、バックラッシュ期間における「初期ガタ速度ωg0からの増速量Δωg」を(27)式により計算する処理Cと、
TIFF
2024130537000055.tif
37
166
但し、
ΔtgH:トルクレベルTGHの出力時間
ωg0:車両システムのギヤ間の初期相対速度
TgH:トルクレベルTGHでのモータのトルク
Jm:モータの慣性モーメント
ΔθBL:バックラッシュ位相の変化量
TIFF
2024130537000056.tif
37
166
但し、
Δωg:バックラッシュ期間における初期相対速度ωg0からの増速量
TgH:トルクレベルTGHでのモータのトルク
Jm:モータの慣性モーメント
【請求項4】
振動抑制制御の補償を適用する前のトルク指令値Tref2の変化率、または、制御出力であるモータトルクTmの変化率とバックラッシュ期間Δt_Gとの積により算出したトルク成分、または、前記モータトルクTmを微分した値とバックラッシュ期間Δt_Gとの積により算出したトルク成分、または、上位の制御系から与えられた目標軸トルクTd_cmdのいずれかを、前記推定トルク指令値Tref(tge)の代用とすることを特徴とする請求項3に記載の振動抑制制御装置。
【請求項5】
モータを駆動源とする車両システムの振動抑制制御装置が実行する振動抑制制御方法であって、
モータの入力トルク指令に基づきモータトルクTmを出力する振動抑制補償過程と、
外乱トルクオブザーバにより前記モータの位相と前記モータトルクTmとに基づき推定モータ加速トルクと当該モータの推定軸トルクとを出力する過程と、
前記推定軸トルクに基づき前記車両システムのバックラッシュ期間を設定すると共にこのバックラッシュ期間中のトルク指令を出力するバックラッシュ制御過程と、
を有し、
前記外乱トルクオブザーバは、車両プラントモデルによる推定モータ角速度^ωm_LPと実モータ検出角速度ωm_LPとの差分に基づいて推定外乱トルク^Tdistを推定し、
前記バックラッシュ制御過程は、
前記推定軸トルクを監視して零クロスするタイミングをバックラッシュ制御の開始タイミングとして検出し、当該推定軸トルクの時間変化率の絶対値成分と、この絶対値成分をばね定数で除したものを推定軸ねじり速度として算出し、当該絶対値成分を初期軸トルクの変化率sTd0としてラッチし、当該推定軸ねじり速度を前記車両システムのギヤ間の初期相対速度ωg0としてラッチするバックラッシュ期間開始検出過程と、
前記初期軸トルクの変化率sTd0または前記初期相対速度ωg0に応じて前記モータのトルクレベル(TGH,TGL)の出力時間(ΔtgH,ΔtgL)を設定し、トルクレベルTGHの出力期間Δt_GH(=ΔtgH)とバックラッシュ期間Δt_G(=ΔtgH+ΔtgL)を演算するバックラッシュ期間演算過程と、
前記バックラッシュ制御の開始タイミングから当該トルクレベルの出力期間及び当該バックラッシュ期間まで経過する期間の信号(S_GH,S_G)を生成するバックラッシュ制御信号生成過程と、
前記トルクレベル(TGH,TGL)と前記バックラッシュ制御の開始トリガからトルクレベルTGHの出力時間の信号(S_GH)とに基づいてバックラッシュ期間中のトルク指令値T_Gを生成する、バックラッシュ期間中のトルク生成過程と、
を有し、
前記振動抑制補償過程は、前記バックラッシュ期間中に前記生成された前記バックラッシュ期間中のトルク指令値T_Gを前記モータトルクTmとして設定すること
を特徴とする振動抑制制御方法。
【請求項6】
モータを駆動源とする車両システムの振動抑制制御装置であって、
モータの入力トルク指令に基づきモータトルクTmを出力する振動抑制補償部と、
前記モータトルクTmを入力とし、車両プラントモデルによる推定モータ角速度^ωm_LPと実モータ検出角速度ωm_LPとの差分に基づいて推定外乱トルク^Tdistを推定する外乱トルクオブザーバと、
前記モータトルクTmと前記推定外乱トルク^Tdistとの偏差に基づいて所定周波数よりも高い周波数成分を抑制した軸トルクを推定して第二の推定軸トルクとして出力する第二の軸トルク推定部と、
前記第二の推定軸トルクと振動抑制の補償成分に基づき前記車両システムのバックラッシュ期間を設定すると共にこのバックラッシュ期間中のトルク指令を出力するバックラッシュ制御部と、
を備え、
前記振動抑制補償部は、前記外乱トルクオブザーバから出力される推定モータ加速トルク^TmAにより前記振動抑制の補償成分TFcompを計算し、
前記バックラッシュ制御部は、
前記第二の推定軸トルクを監視して零クロスするタイミングをバックラッシュ制御の開始タイミングとして検出し、前記振動抑制の補償成分TFcompを係数乗算の後に絶対値成分に変換し、この絶対値成分をばね定数で除したものを推定軸ねじり速度として算出し、当該絶対値成分を初期軸トルクの変化率sTd0としてラッチし、当該推定軸ねじり速度を前記車両システムのギヤ間の初期相対速度ωg0としてラッチするバックラッシュ期間開始検出部と、
前記初期軸トルクの変化率sTd0または前記初期相対速度ωg0に応じて前記モータのトルクレベル(TGH,TGL)の出力時間(ΔtgH,ΔtgL)を設定し、トルクレベルTGHの出力時間Δt_GH(=ΔtgH)とバックラッシュ期間Δt_G(=ΔtgH+ΔtgL)を演算するバックラッシュ期間演算部と、
前記バックラッシュ制御の開始タイミングから当該トルクレベルの出力時間及び当該バックラッシュ期間まで経過する期間の信号(S_GH,S_G)を生成するバックラッシュ制御信号生成部と、
前記トルクレベル(TGH,TGL)と前記バックラッシュ制御の開始トリガからトルクレベルTGHの出力時間の信号(S_GH)とに基づいてバックラッシュ期間中のトルク指令値T_Gを生成する、バックラッシュ期間中のトルク生成部を備え、
前記振動抑制補償部は、前記バックラッシュ期間中に前記生成された前記バックラッシュ期間中のトルク指令値T_Gを前記モータトルクTmとして設定することを特徴とする振動抑制制御装置。
【請求項7】
前記推定外乱トルク^Tdistにトルク変換係数を乗算して外乱トルク補正値^Tdist_Gを算出する乗算器と、
前記バックラッシュ期間中のトルク指令値T_Gに前記外乱トルク補正値^Tdist_Gを加算した値を「バックラッシュ期間中の補正後トルク指令値」とする加算器と、
を備え、
前記振動抑制補償部は、前記バックラッシュ期間中に前記「バックラッシュ期間中の補正後トルク指令値」を前記モータトルクTmとして設定することを特徴とする請求項1もしくは請求項6に記載の振動抑制制御装置。
【請求項8】
モータを駆動源とする車両システムの振動抑制制御装置が実行する振動抑制制御方法であって、
モータの入力トルク指令に基づきモータトルクTmを出力する振動抑制補償過程と、
前記モータトルクTmの入力により、外乱トルクオブザーバにおいて、車両プラントモデルによる推定モータ角速度^ωm_LPと実モータ検出角速度ωm_LPとの差分に基づいて推定外乱トルク^Tdistを推定する過程と、
前記モータトルクTmと前記推定外乱トルク^Tdistとの偏差に基づいて所定周波数よりも高い周波数成分を抑制した軸トルクを推定して第二の推定軸トルクとして出力する第二の軸トルク推定過程と、
前記第二の推定軸トルクと前記振動抑制補償過程での補償成分に基づき前記車両システムのバックラッシュ期間を設定すると共にこのバックラッシュ期間中のトルク指令を出力するバックラッシュ制御過程と、
を有し、
前記振動抑制補償過程は、前記外乱トルクオブザーバから出力される推定モータ加速トルク^TmAにより振動抑制の補償成分TFcompを計算し、
前記バックラッシュ制御過程は、
前記第二の推定軸トルクを監視して零クロスするタイミングをバックラッシュ制御の開始タイミングとして検出し、前記振動抑制の補償成分を係数乗算の後に絶対値成分に変換し、この絶対値成分をばね定数で除したものを推定軸ねじり速度として算出し、当該絶対値成分を初期軸トルクの変化率sTd0としてラッチし、当該推定軸ねじり速度を前記車両システムのギヤ間の初期相対速度ωg0としてラッチするバックラッシュ期間開始検出過程と、
前記初期軸トルクの変化率sTd0または前記初期相対速度ωg0に応じて前記モータのトルクレベル(TGH,TGL)の出力時間(ΔtgH,ΔtgL)を設定し、トルクレベルTGHの出力時間Δt_GH(=ΔtgH)とバックラッシュ期間Δt_G(=ΔtgH+ΔtgL)を演算するバックラッシュ期間演算過程と、
前記バックラッシュ制御の開始タイミングから当該トルクレベルの出力時間及び当該バックラッシュ期間まで経過する期間の信号(S_GH,S_G)を生成するバックラッシュ制御信号生成過程と、
前記トルクレベル(TGH,TGL)と前記バックラッシュ制御の開始トリガからトルクレベルTGHの出力時間の信号(S_GH)とに基づいてバックラッシュ期間中のトルク指令値T_Gを生成する、バックラッシュ期間中のトルク生成過程と、
を有し、
前記振動抑制補償過程は、前記バックラッシュ期間中に前記生成された前記バックラッシュ期間中のトルク指令値T_Gを前記モータトルクTmとして設定することを特徴とする振動抑制制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動機(モータ)を駆動源とする車両システムの振動抑制制御技術に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
モータとタイヤ間の駆動力伝達機構には、シャフトやギヤなどが存在する。シャフトの剛性が低いと弾性軸(ねじりバネ)となり、モータや車体の慣性成分と共振が生じる。さらにギヤ部にはバックラッシュが存在するので、駆動力が反転する際には「ガタショック・歯打ち音」が問題となり、トルク応答の不連続が振動源になる。この対策として、軸共振を抑制する振動抑制制御や、バックラッシュに起因する衝撃を抑制するガタ詰め制御(バックラッシュ制御)が適用される(特許文献1~5)。
【0003】
特許文献1,2では、シャフトなどの弾性軸による共振を抑制する振動抑制制御が提案されている。特許文献1では車両モデルを利用して、トルク指令と速度検出情報から振動を抑制するための補償トルクを演算し、入力トルク指令に補償トルクを加算する構成が記載されている。特許文献2では、トルク制御(電流制御)の応答遅れや速度検出のムダ時間などによる影響を低減するために、振動抑制制御の内部にも整合用の遅延を挿入する方法が提案されている。
【0004】
特許文献3では、これらの振動抑制制御に対してさらにガタ詰め制御機能を追加しており、「トルク指令に補正を加えるフィードフォワード制御部」と、「速度検出を利用したフィードバック制御部」とを組み合わせた構成が提案されている。フィードフォワード制御部は「トルク指令の共振帯域成分を除去する機能」や「ガタ詰め制御」として機能し、フィードバック制御部では軸共振を抑制する「振動抑制制御」として機能する。
【0005】
また、特許文献4や非特許文献1では、「バックラッシュ期間中のギヤ間の相対速度(ガタ速度)」に着目した方式が提案されており、歯が再接触する直前に「相対速度を零まで減速」させている。相対速度をほぼ零まで低減させればギヤの歯が接触するときのショックは無くなるが、その代わりバックラッシュ位相までの到達時間であるガタ期間(バックラッシュ期間)が長くなるため、トルク指令に対する応答遅れが増加する。この他にこれらの方式では、外力やモデル誤差による影響までは考慮されていない課題もある。
【0006】
上記の制御とは異なる「振動抑制制御方式」として、特許文献5では「外乱トルクオブザーバ」を構成して、振動抑制制御を実現している。オブザーバ内部に車両システムのモデルを実装しておき、モデルと実機のモータ速度の偏差を利用して「外乱トルク成分」を推定させる。そして、モデル内の「モータ慣性モーメントを加速するトルク成分(モータ加速トルク)」を利用して、振動抑制のための補償成分を得ている。また、車体に加わる外力の影響も外乱トルクとして推定できるので、ガタ詰め制御においても正確な開始タイミングの検出や初期ガタ速度を推定することができる。
【0007】
以降では「バックラッシュ中の異常加速」と「バックラッシュ直後の歯当たりショック(ガタショック)」および「バックラッシュ後から定常状態への移行時に生じる過渡軸トルク」という3種類の異なる現象を表現するために、全体を「ガタ詰め制御」と略称し、個別の制御内容については「ガタ中のモータ加速の抑制」、「ガタショック対策」、「ガタ後の過渡軸トルクの低減」等と称する。また、ギヤ間の相対位相や相対速度を「ガタ位相・ガタ速度」と称し、バックラッシュ期間の開始タイミングを「ガタ開始」、バックラッシュ期間の終了タイミングは「ガタ終了」と称する。
【0008】
文字「Tやt」を頭文字とする変数はトルク:T*、慣性モーメント:TJ*、時刻:t*、時間間隔:Δt*と表記する。
【0009】
従来技術の数式モデルについて説明する。
【0010】
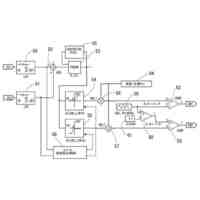
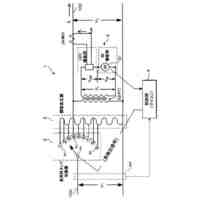
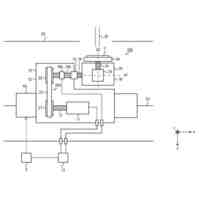
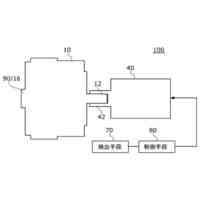
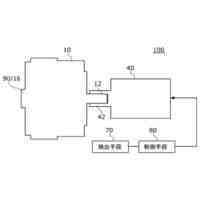
(1)車両プラントモデルの定義
図1は制御対象である車両システムを伝達関数のブロック図である。これは特許文献1に記載されているモデルに対して「トルクと速度の基底値よる正規化」を適用したものである。「モータの極対数やギヤ比およびタイヤ径」を「慣性モーメントに相当する積分時定数」に集約しており、係数ブロックが減っているが特性的には等価なモデルである。ここで、「s」はラプラス演算子であり、微分や積分などを表現している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
ニチコン株式会社
電力変換装置
3日前
株式会社アイドゥス企画
電動シリンダ
19日前
株式会社ダイヘン
電気機器
4日前
ミネベアミツミ株式会社
回転機器
3日前
矢崎総業株式会社
配電装置
3日前
矢崎総業株式会社
配電装置
5日前
鹿島建設株式会社
分電盤の配置構造
5日前
富士電機株式会社
電力変換装置
5日前
富士電機株式会社
電力変換装置
5日前
日産自動車株式会社
インバータ
3日前
富士電機株式会社
電力変換装置
5日前
富士電機株式会社
電力変換装置
5日前
富士電機株式会社
電力変換装置
5日前
富士電機株式会社
電源システム
10日前
株式会社ダイヘン
電圧調整装置
14日前
株式会社SUBARU
モータの冷却構造
6日前
コーセル株式会社
スイッチング電源装置
14日前
株式会社ダイヘン
蓄電池システム
4日前
シンフォニアテクノロジー株式会社
モータ
5日前
矢崎総業株式会社
グロメット
4日前
日新イオン機器株式会社
駆動装置および真空装置
5日前
矢崎総業株式会社
シールド構造
12日前
株式会社明電舎
回転電機
13日前
京セラ株式会社
電力変換装置
4日前
住友重機械工業株式会社
アクチュエータ
14日前
住友重機械工業株式会社
アクチュエータ
14日前
日立Astemo株式会社
電動駆動装置
6日前
カヤバ株式会社
モータおよびモータの製造方法
10日前
個人
太陽光発電の発電効率を上げる配線及びその装置
19日前
TOTO株式会社
無線送電システム
3日前
株式会社東芝
磁性楔及び回転電機
4日前
株式会社明電舎
電力変換装置
5日前
株式会社明電舎
電力変換装置
6日前
株式会社明電舎
電力変換装置
13日前
トヨタ自動車株式会社
充電システム及び充電方法
4日前
個人
蓄電池システム
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ