TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025040060
公報種別
公開特許公報(A)
公開日
2025-03-24
出願番号
2023146731
出願日
2023-09-11
発明の名称
アクチュエータ
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
H02K
7/116 20060101AFI20250314BHJP(電力の発電,変換,配電)
要約
【課題】本発明の目的の一つは、モータを含めた総合的なバックドライバビリティを向上可能なアクチュエータを提供することにある。
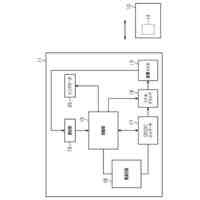
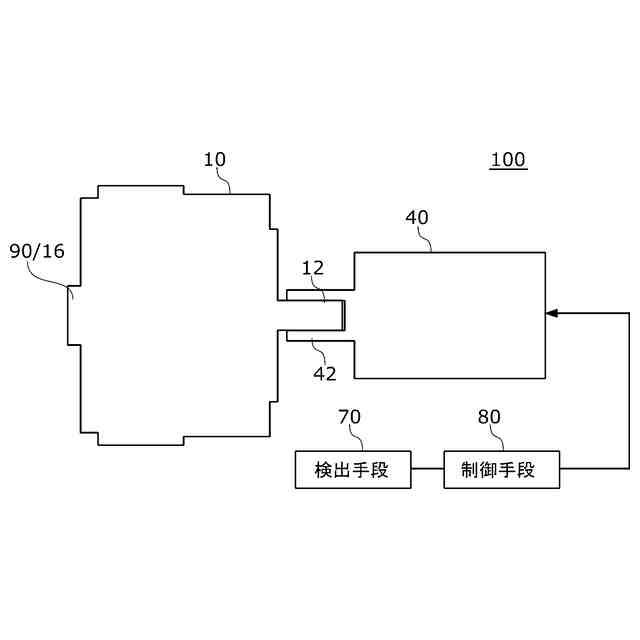
【解決手段】アクチュエータ100は、モータ40と、モータ40の回転を減速する減速機10と、を有するアクチュエータであって、減速機10は、効率が60%以上であり、モータ40のコギングトルクを抑制する制御を行う制御手段80を有する。
【選択図】図1
特許請求の範囲
【請求項1】
モータと、前記モータの回転を減速する減速機と、を有するアクチュエータであって、
前記減速機は、効率が60%以上であり、
前記モータのコギングトルクを抑制する制御を行う制御手段を有するアクチュエータ。
続きを表示(約 780 文字)
【請求項2】
前記モータは、コギングトルクの減速比倍が前記減速機の増速起動トルク以下である低コギングモータである、請求項1に記載のアクチュエータ。
【請求項3】
前記モータは、コアレスモータである、請求項2に記載のアクチュエータ。
【請求項4】
本アクチュエータは、稼働率が20%ED以下の協働ロボットの関節を駆動するアクチュエータである、請求項3に記載のアクチュエータ。
【請求項5】
前記モータは、当該モータの磁極数とスロット数の最小公倍数の次数よりも低次のコギングトルクを抑制するための構成を有する、請求項1に記載のアクチュエータ。
【請求項6】
前記モータは、一体コア型のステータコアを有する、請求項1に記載のアクチュエータ。
【請求項7】
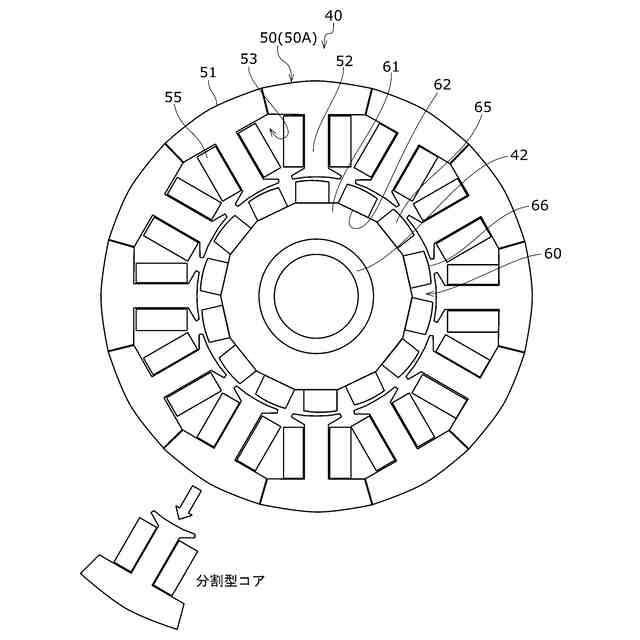
前記モータは、分割コア型のステータコアを有し、
前記ステータコアの内周面および外周面の少なくとも一方に機械加工面を有する、請求項1に記載のアクチュエータ。
【請求項8】
前記モータは、磁石が配置される磁石配置面が周方向に複数設けられるロータコアを有し、
前記磁石は、前記磁石配置面の周方向一方側に寄せて配置される、請求項1に記載のアクチュエータ。
【請求項9】
本アクチュエータの出力軸に作用する力を検出するための検出手段を有し、
前記制御手段は、前記検出手段の検出結果に基づいて本アクチュエータを制御する、請求項1に記載のアクチュエータ。
【請求項10】
前記制御手段は、前記モータの磁極数とスロット数の最小公倍数の次数よりも低次のコギングトルクを抑制する制御を行う、請求項1に記載のアクチュエータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、アクチュエータに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
モータと減速機を組み合わせたアクチュエータが知られている。本出願人は、特許文献1により、モータと減速機を有するアクチュエータが組み込まれたロボットの関節を開示している。この文献では、減速機の伝達効率に与える減速機の減速比の影響に関する知見から、外力センサに依存せずに外力に対応可能なアクチュエータを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2021-030344号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ダイレクトティーチング等によりロボットの関節にアームから外力が加わると、関節のアクチュエータはバックドライブ(逆駆動)される。アクチュエータを高精度に制御するには、動力伝達に伴う摩擦を低減し、バックドライバビリティ(逆駆動性)を向上させることが重要である。
この観点から、特許文献1に記載の技術では、モータも含めたアクチュエータ全体としてのバックドライバビリティ向上に改善の余地があった。
【0005】
本発明は、このような課題に鑑みてなされたもので、モータを含めた総合的なバックドライバビリティを向上可能なアクチュエータを提供することを目的の一つとする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様のアクチュエータは、モータと、モータの回転を減速する減速機と、を有するアクチュエータであって、減速機は、効率が60%以上であり、モータのコギングトルクを抑制する制御を行う制御手段を有する。
【0007】
なお、以上の構成要素の任意の組み合わせや、本発明の構成要素や表現を方法、システムなどの間で相互に置換したものもまた、本発明の態様として有効である。
【発明の効果】
【0008】
本発明によれば、モータを含めた総合的なバックドライバビリティを向上可能なアクチュエータを提供できる。
【図面の簡単な説明】
【0009】
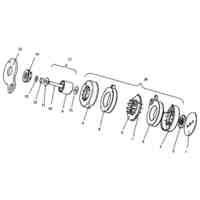
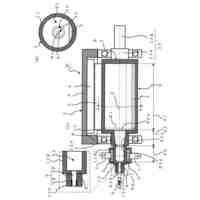
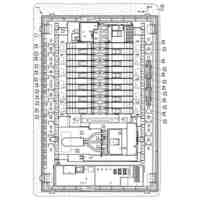
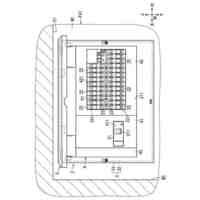
実施形態のアクチュエータを概略的に示す図である。
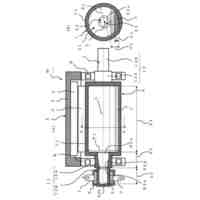
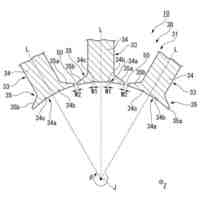
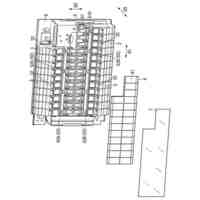
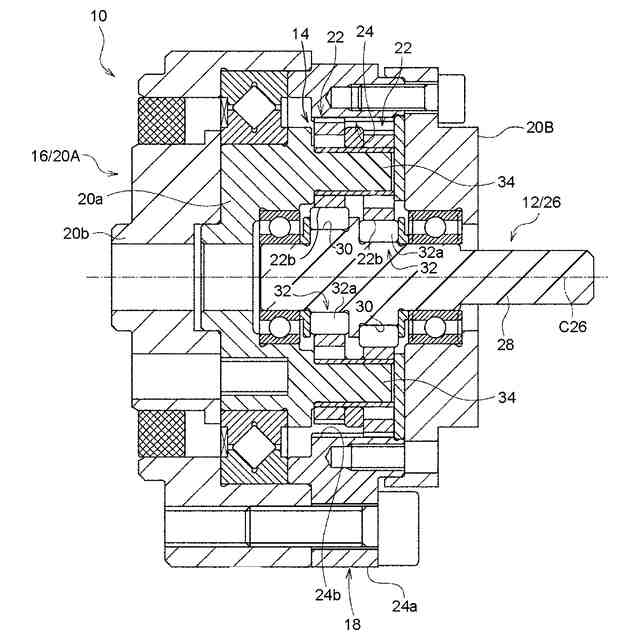
図1の減速機の側面断面図である。
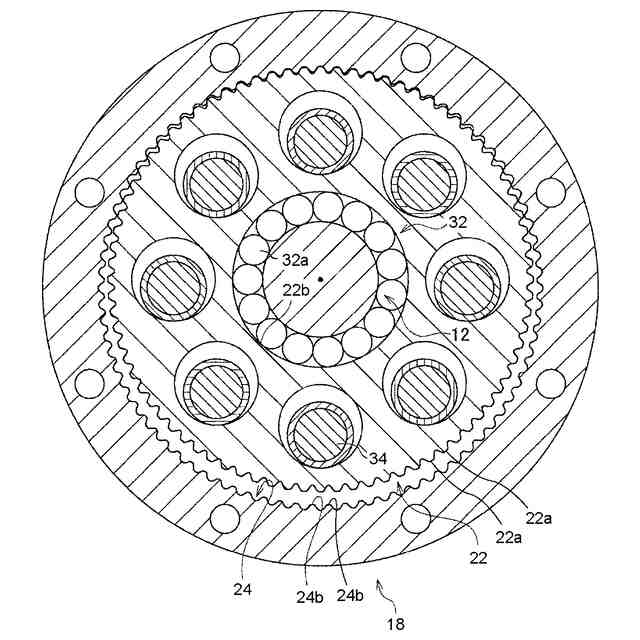
図1の減速機の正面断面図である。
接触点軌跡の説明図である。
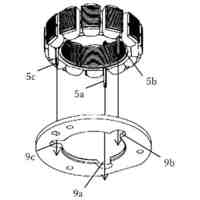
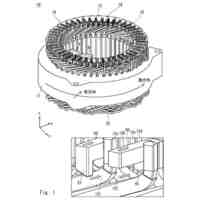
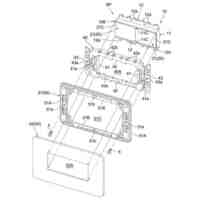
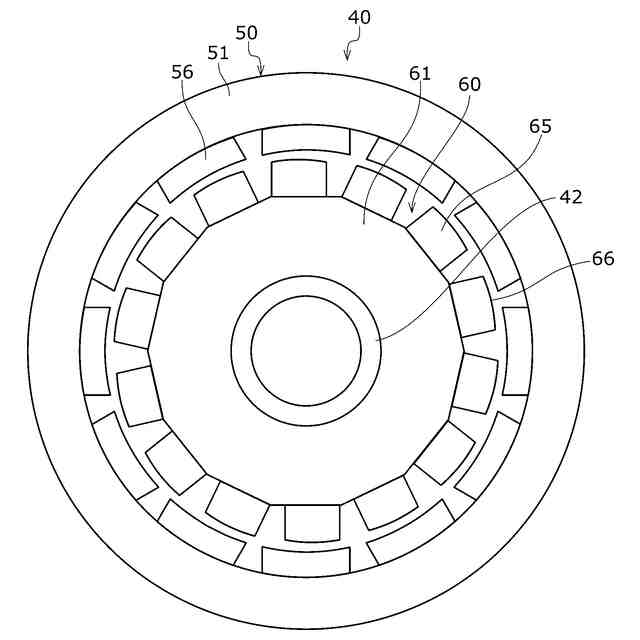
モータの第1の例を示す正面断面図である。
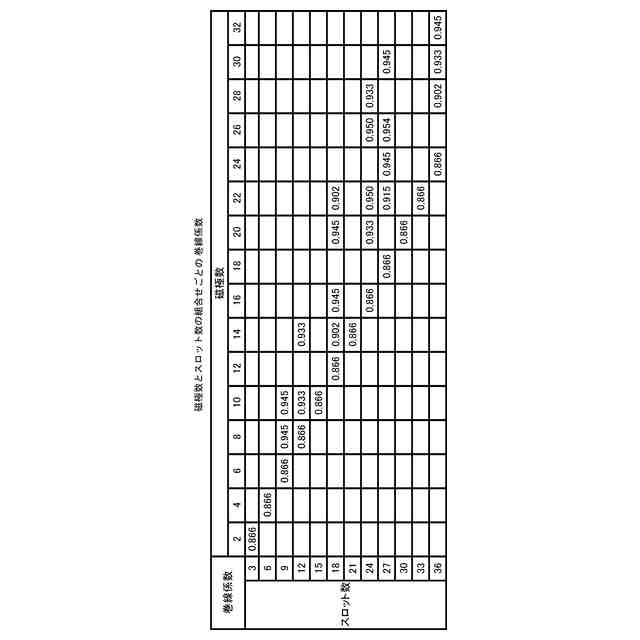
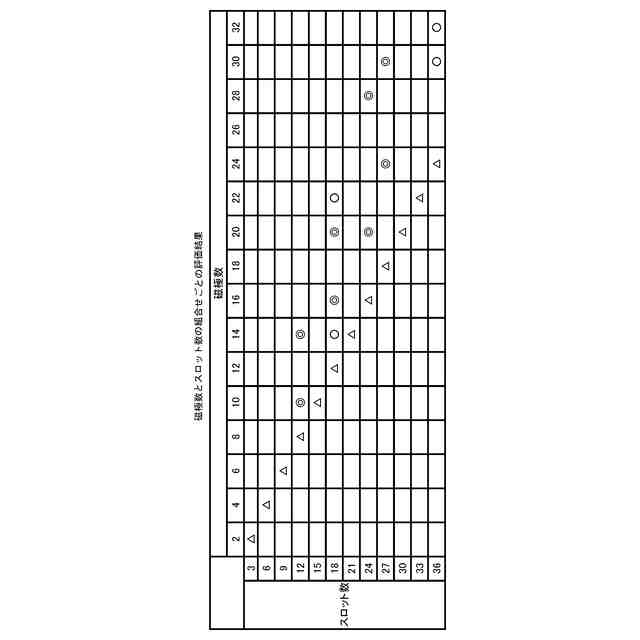
ロータの磁極数とステータコアのスロット数の組合せを示す図である。
磁極数とスロット数の組合せを示す図である。
分割コア型のステータコアを有するモータを示す正面断面図である。
一体コア型のステータコアを有するモータを示す正面断面図である。
分割コア型のステータコアの機械加工面を示す図である。
ロータコアの磁石配置面を拡大して示す拡大図である。
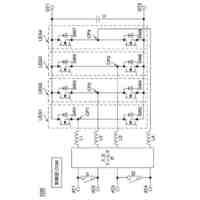
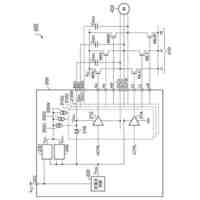
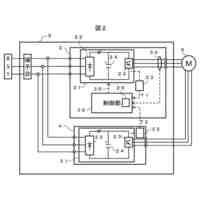
アクチュエータの制御構成の一例を示すブロック図である。
アクチュエータのバックドライブ抵抗を示す図である。
アクチュエータのバックドライブ抵抗を示す別の図である。
【発明を実施するための形態】
【0010】
本実施形態のアクチュエータを想到するに至った背景から説明する。前述のように、アクチュエータは、出力軸に外力が加わることでバックドライブ(逆駆動)される。アクチュエータを高精度に制御するには、バックドライブに対する抵抗(バックドライブ抵抗)を減らし、バックドライバビリティ(逆駆動性)を向上させることが重要である。アクチュエータのバックドライバビリティは、アクチュエータの出力軸に外力が加えられたとき、その出力軸が可動であり、且つ、その外力がアクチュエータの入力側に伝わる伝わりやすさともいえる。
これらから、本願発明者は、モータと減速機を有するアクチュエータのバックドライブ抵抗を研究し以下の知見を得た。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
16日前
個人
高圧電気機器の開閉器
3日前
キヤノン電子株式会社
モータ
15日前
キヤノン電子株式会社
モータ
23日前
株式会社アイドゥス企画
減反モータ
3日前
トヨタ自動車株式会社
モータ
15日前
矢崎総業株式会社
電源回路
2日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
10日前
ローム株式会社
モータドライバ回路
10日前
日産自動車株式会社
ロータシャフト
10日前
日産自動車株式会社
ロータシャフト
10日前
トヨタ自動車株式会社
ステータの製造装置
16日前
トヨタ自動車株式会社
可変界磁ロータ
18日前
株式会社マキタ
電動作業機
23日前
京商株式会社
模型用非接触電力供給システム
3日前
株式会社アイシン
電力変換装置
15日前
個人
電線盗難防止方法及び電線盗難防止装置
23日前
株式会社豊田自動織機
電力供給システム
15日前
豊田合成株式会社
車両用非接触充電装置
15日前
本田技研工業株式会社
回転電機用ロータ
3日前
トヨタ自動車株式会社
車両照合システム
23日前
大阪瓦斯株式会社
充放電中継装置
16日前
大阪瓦斯株式会社
充放電中継装置
16日前
ニデック株式会社
回転電機
15日前
ルネサスエレクトロニクス株式会社
半導体装置
15日前
日動電工株式会社
壁内配線用のブランクプレート
2日前
個人
電動自動車用同期電動機の変速方法と駆動制御装置
17日前
株式会社豊田中央研究所
分散電源システム
10日前
株式会社京三製作所
パルス電源装置
2日前
株式会社京三製作所
パルス電源装置
2日前
パナソニック株式会社
分電盤
15日前
パナソニック株式会社
分電盤
15日前
パナソニック株式会社
分電盤
15日前
株式会社日立産機システム
キュービクル
18日前
パナソニック株式会社
分電盤
15日前
株式会社日立産機システム
電力変換装置
23日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ