TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025096065
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023212552
出願日
2023-12-15
発明の名称
モータ制御装置
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
H02P
8/16 20060101AFI20250619BHJP(電力の発電,変換,配電)
要約
【課題】モータの制御において最大効率の進角を使うことにより、電圧の上昇を抑えつつ、モータを高速で回転させることを可能とすること。
【解決手段】モータ制御装置は、モータを駆動させるための駆動波形の進角とモータが回転する速度との関係を駆動波形の振幅ごとに記憶している記憶手段と、モータの速度を検出する速度検出手段と、モータが回転した位置を検出する位置検出手段と、モータが回転した位置が位置検出手段により検出される周期又はタイミングに基づいて駆動波形の進角及び駆動波形の振幅を制御し、更に、速度検出手段により検出されたモータの速度が目標速度よりも低い場合に駆動波形の進角を増加させ、駆動波形の進角の増加に伴うモータの速度の増加量が所定の増加量以下であるという条件が満たされている場合に駆動波形の振幅を増加させる第一制御パターンを実行することによりモータの速度を増加させる制御手段と、を備えることを特徴とする。
【選択図】図17
特許請求の範囲
【請求項1】
モータを駆動させるための駆動波形の進角と前記モータが回転する速度との関係を前記駆動波形の振幅ごとに記憶している記憶手段と、
前記モータの速度を検出する速度検出手段と、
前記モータが回転した位置を検出する位置検出手段と、
前記モータが回転した位置が前記位置検出手段により検出される周期又はタイミングに基づいて前記駆動波形の進角及び前記駆動波形の振幅を制御し、更に、前記速度検出手段により検出された前記モータの速度が目標速度よりも低い場合に前記駆動波形の進角を増加させ、前記駆動波形の進角の増加に伴う前記モータの速度の増加量が所定の増加量以下であるという条件が満たされている場合に前記駆動波形の振幅を増加させる第一制御パターンを実行することにより前記モータの速度を増加させる制御手段と、
を備えることを特徴とするモータ制御装置。
続きを表示(約 680 文字)
【請求項2】
前記速度検出手段は、前記第一制御パターンが実行された後に前記モータの速度を検出し、
前記制御手段は、前記第一制御パターンを実行した後における前記モータの速度が前記目標速度未満である場合、前記第一制御パターンを再度実行する、
ことを特徴とする請求項1に記載のモータ制御装置。
【請求項3】
前記制御手段は、前記速度検出手段により検出された前記モータの速度が目標速度よりも低い場合に前記駆動波形の進角を増加させた後、前記駆動波形の進角の増加に伴って前記モータの速度が減少した場合、前記駆動波形の振幅を増加させる、
ことを特徴とする請求項1又は請求項2に記載のモータ制御装置。
【請求項4】
前記制御手段は、前記条件が満たされており、前記モータの速度と前記目標速度との差分が所定の速度以上である場合、前記条件が満たされており、前記差分が前記所定の速度未満である場合よりも前記駆動波形の振幅の増加量を大きくする、
ことを特徴とする請求項1又は請求項2に記載のモータ制御装置。
【請求項5】
前記制御手段は、前記速度検出手段により検出された前記モータの速度が目標速度よりも高い場合に前記駆動波形の進角を減少させ、前記駆動波形の進角の減少に伴う前記モータの速度の減少量が所定の減少量以下である場合に前記駆動波形の振幅を減少させる第二制御パターンを実行することにより前記モータの速度を減少させる、
ことを特徴とする請求項1又は請求項2に記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
ステッピングモータは、様々な分野で用いられており、オープンループ制御により高精度な位置決め動作を容易に実行することが可能であるものの、オープンループ制御時の高負荷や高速回転により脱調する可能性がある。これを解決する方法として、ステッピングモータに設けられている位置センサから取得されるモータの回転位相信号を用いて回転位相に対する駆動波形の進角を制御する方法がある。この方法によれば、最適な進角制御によって回転効率を最大限に引き出すことが可能となり、高速化や省電力化を実現することができる。また、特許文献1では、徐々に駆動電圧を減少させた場合の進角の変化量によって最大効率の進角を探索し、駆動電圧を決定する方法が提案されている。また、特許文献2では、進角から求めた駆動効率が閾値以上であれば駆動電圧を減少させる方法が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-198727号公報
特開2011-239483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した方法では、ステッピングモータの機械的又は電気的なばらつき、負荷変動等を考慮して進角の制御マージンを確保する必要があるため、効率の良い進角領域を利用できないことがある。特許文献1に開示されている技術では、最大効率の進角を探索することができるものの、最大効率の進角を探索する期間を設ける必要があり、モータの特性の変化に即時に対応することができないことがある。特許文献2に開示されている技術では、ある程度効率のよい進角を求めることができるものの、最大効率の進角を求めることができないことがある。
【0005】
そこで、本発明は、モータの制御において最大効率の進角を使うことにより、電圧の上昇を抑えつつ、モータを高速で回転させることを可能とすることを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決するために、本発明のモータ制御装置は、モータを駆動させるための駆動波形の進角と前記モータが回転する速度との関係を前記駆動波形の振幅ごとに記憶している記憶手段と、前記モータの速度を検出する速度検出手段と、前記モータが回転した位置を検出する位置検出手段と、前記モータが回した転位置が前記位置検出手段により検出される周期又はタイミングに基づいて前記駆動波形の進角及び前記駆動波形の振幅を制御し、更に、前記速度検出手段により検出された前記モータの速度が目標速度よりも低い場合に前記駆動波形の進角を増加させ、前記駆動波形の進角の増加に伴う前記モータの速度の増加量が所定の増加量以下であるという条件が満たされている場合に前記駆動波形の振幅を増加させる第一制御パターンを実行することにより前記モータの速度を増加させる制御手段と、を備えることを特徴とする。
【発明の効果】
【0007】
本発明によれば、モータの制御において最大効率の進角を使うことにより、電圧の上昇を抑えつつ、モータを高速で回転させることを可能とすることができる。
【図面の簡単な説明】
【0008】
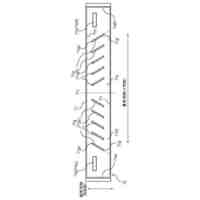
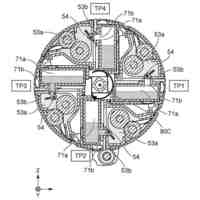
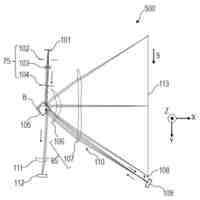
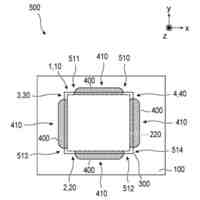
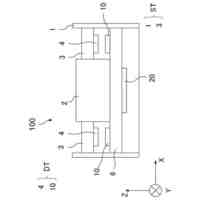
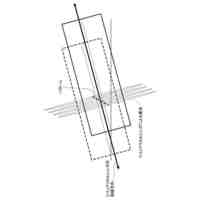
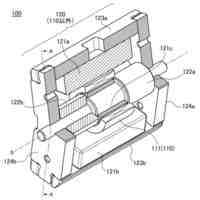
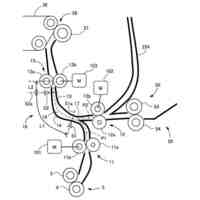
ステッピングモータユニットの構成の例を示す図である。
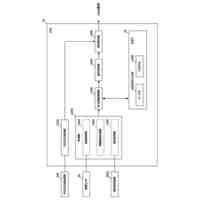
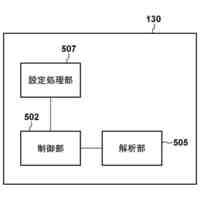
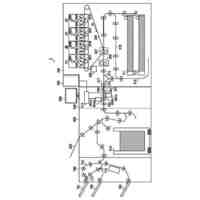
ステッピングモータを駆動する電気回路を含むシステムの構成の例を示す図である。
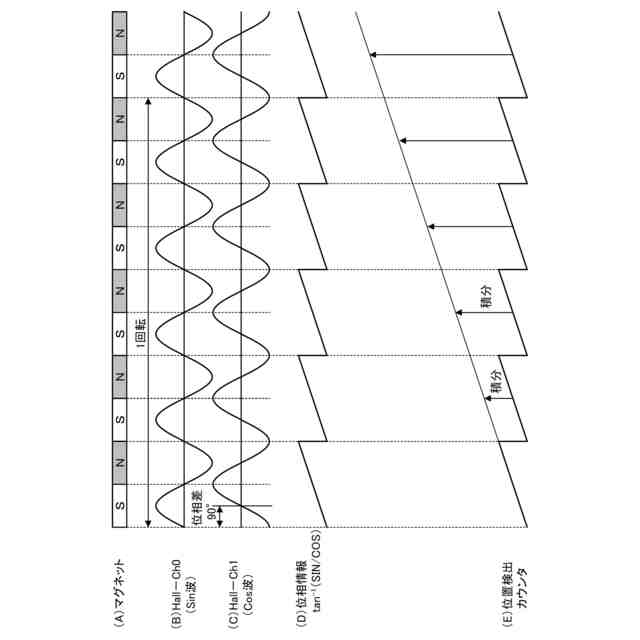
回転位相検出用のマグネットの極、ホール信号の波形、位相情報及び位置検出カウンタの例を示す図である。
回転位相検出用のマグネットの極、ホール信号の波形、位置検出カウンタ、目標位置カウンタ、駆動カウンタ、A相駆動波形及びB相駆動波形の例を示す図である。
ステッピングモータを駆動させるための駆動波形の進角とステッピングモータの速度との関係の例を示す図である。
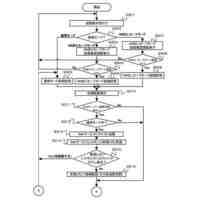
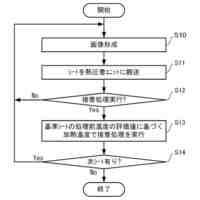
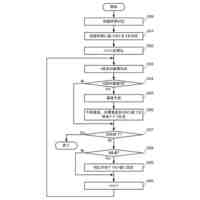
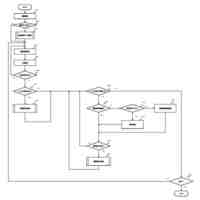
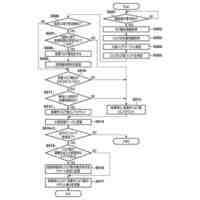
進角・パワーレート制御部により実行される処理の例を示すフローチャートである。
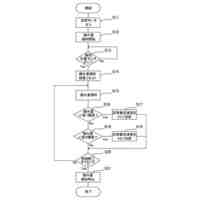
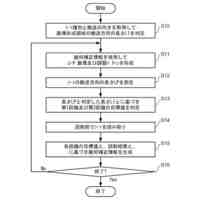
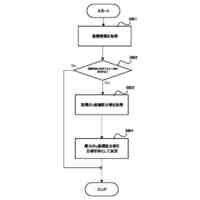
目標進角・パワーレート選択処理の例を示すフローチャートである。
速度制御の例を示すフローチャートである。
目標速度が加速方向に設定され、目標速度が1000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
目標速度が加速方向に設定され、目標速度が2000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
目標速度が加速方向に設定され、目標速度が3000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
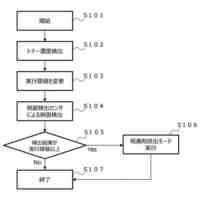
図9から図11を参照しながら説明した進角・パワーレート探索処理の例を説明するためのフローチャートである。
目標速度が減速方向に設定され、目標速度が3000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
目標速度が減速方向に設定され、目標速度が2000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
目標速度が減速方向に設定され、目標速度が1000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
図13から図15を参照しながら説明した進角・パワーレート探索処理の例を説明するためのフローチャートである。
目標速度が加速方向に設定され、目標速度が2500ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
図17を参照しながら説明した進角・パワーレート探索処理の例を説明するためのフローチャートである。
目標速度が減速方向に設定され、目標速度が1000ppSである場合における目標進角・パワーレート探索処理の例を説明するための図である。
図19を参照しながら説明した進角・パワーレート探索処理の例を説明するためのフローチャートである。
【発明を実施するための形態】
【0009】
まず、本発明の各実施形態に共通する構成及び動作を説明し、その後に各実施形態について説明する。
【0010】
図1を参照しながら本発明におけるモータユニットの構成の概略について説明する。図1は、ステッピングモータユニットの構成の例を示す図である。図1(A)は、ステッピングモータ101と、回転軸102と、ラック103と、移動部材104と、フォトインタラプタ105と、遮光版106と、回転位相検出用マグネット107と、ホールセンサ108と、ホールセンサ109とを示している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
13日前
キヤノン株式会社
トナー
13日前
キヤノン株式会社
通信端末
13日前
キヤノン株式会社
電子機器
4日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
13日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
画像形成装置
11日前
キヤノン株式会社
電子写真装置
4日前
キヤノン株式会社
画像形成装置
4日前
キヤノン株式会社
情報処理装置
12日前
キヤノン株式会社
情報処理装置
12日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
モジュール及び電子機器
13日前
キヤノン株式会社
力検出装置および搬送装置
4日前
キヤノン株式会社
画像処理装置、画像処理方法
13日前
キヤノン株式会社
測定装置及び物品の製造方法
4日前
キヤノン株式会社
電子機器およびその制御方法
12日前
キヤノン株式会社
電子機器およびその制御方法
12日前
キヤノン株式会社
電子機器およびその制御方法
12日前
キヤノン株式会社
レンズ鏡筒、および撮像装置
4日前
キヤノン株式会社
電子機器およびその制御方法
12日前
キヤノン株式会社
接合装置、および物品製造方法
12日前
キヤノン株式会社
ステレオ光学系および撮像装置
4日前
キヤノン株式会社
リニアアクチュエータ及び機器
13日前
キヤノン株式会社
ステレオ光学系および撮像装置
4日前
キヤノン株式会社
画像形成システム、画像形成装置
14日前
キヤノン株式会社
シート搬送装置及び画像形成装置
5日前
キヤノン株式会社
光電変換装置及び光検出システム
4日前
キヤノン株式会社
シール部材及びシール部材の製造方法
13日前
キヤノン株式会社
管理システム及び管理方法とプログラム
5日前
キヤノン株式会社
露光装置、制御方法及び物品の製造方法
11日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ