TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024128299
公報種別
公開特許公報(A)
公開日
2024-09-24
出願番号
2023037217
出願日
2023-03-10
発明の名称
移動体制御システム
出願人
戸田建設株式会社
,
株式会社Spiral
代理人
あいわ弁理士法人
主分類
G05D
1/46 20240101AFI20240913BHJP(制御;調整)
要約
【課題】トンネル内に設けられるマーカの位置を示す情報を容易に取得し、当該情報を用いて飛行体を飛行させることが可能なシステムを提供すること。
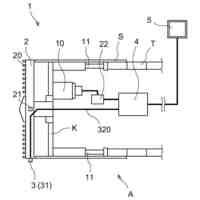
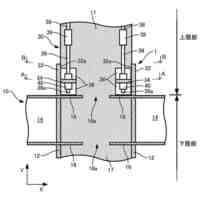
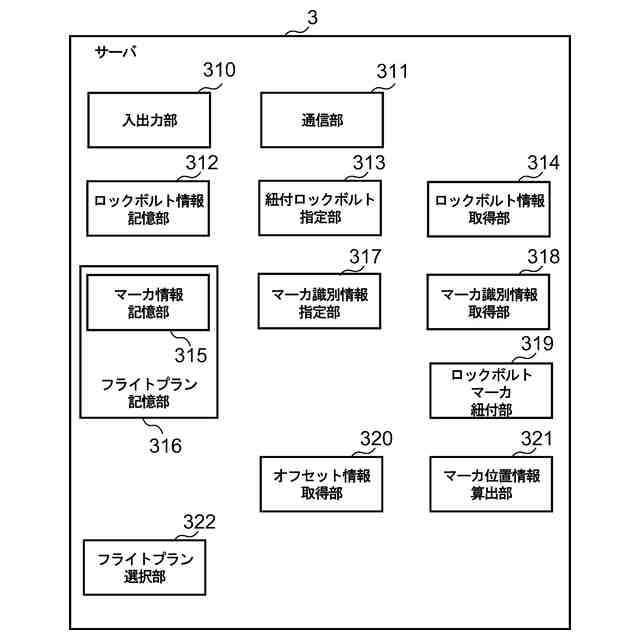
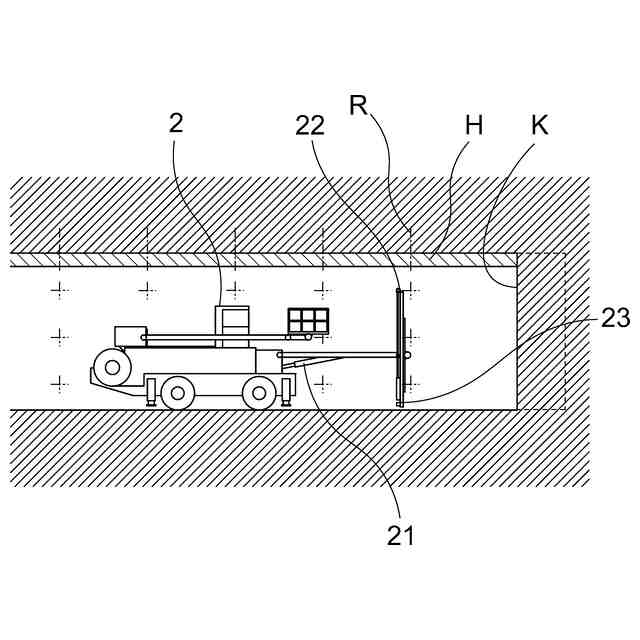
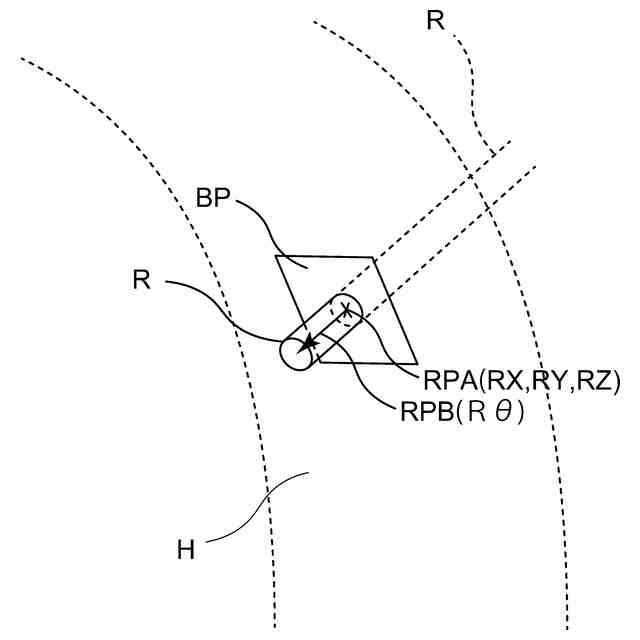
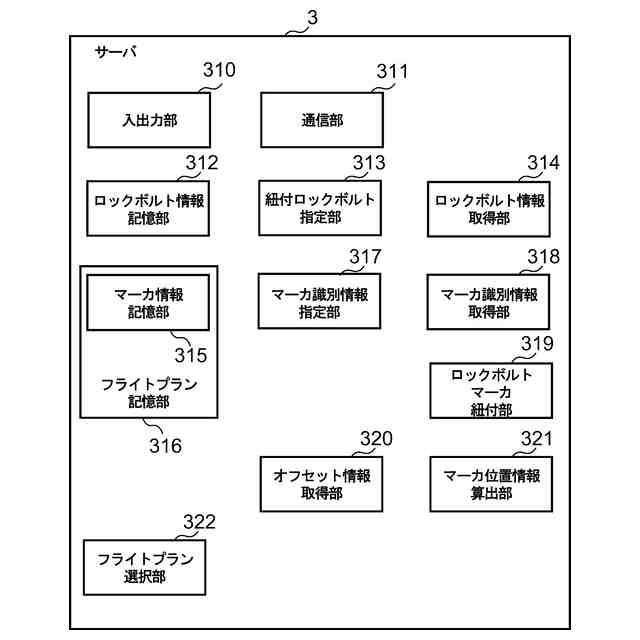
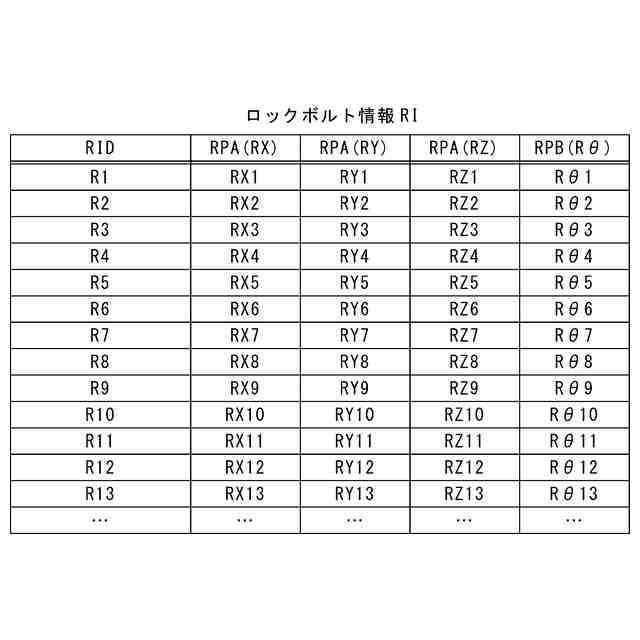
【解決手段】移動体の制御に用いられる移動体制御システムが、トンネルの周壁Hに設けられるロックボルトRの位置を示す情報を含むロックボルト情報を取得するロックボルト情報取得部と、ロックボルト情報取得部が取得したロックボルト情報に基づいて、ロックボルトに対応付けて設けられるマーカの位置を示す情報であるマーカ位置情報を算出するマーカ位置情報算出部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
移動体の制御に用いられる移動体制御システムであって、
構造物に設けられるロックボルトの位置を示す情報を含むロックボルト情報を取得するロックボルト情報取得部と、
前記ロックボルト情報取得部が取得した前記ロックボルト情報に基づいて、前記ロックボルトに対応付けて設けられるマーカの位置を示す情報であるマーカ位置情報を算出するマーカ位置情報算出部と、
を備える移動体制御システム。
続きを表示(約 610 文字)
【請求項2】
前記ロックボルトと前記マーカとの間の位置関係を示す情報を含むオフセット情報を取得するオフセット情報取得部をさらに備え、
前記マーカ位置情報算出部は、前記オフセット情報取得部が取得した前記オフセット情報に基づいて、前記マーカ位置情報を算出する請求項1に記載の移動体制御システム。
【請求項3】
前記マーカの画像を取得するマーカ画像取得部と、
前記マーカ画像取得部によって取得された前記画像に基づいて、前記マーカのマーカ識別情報を判定するマーカ識別情報判定部と、
前記マーカ識別情報判定部によって判定された前記マーカ識別情報に基づいて、前記マーカ位置情報算出部が算出した前記マーカ位置情報を取得するマーカ位置情報取得部と、
前記マーカ位置情報取得部によって取得された前記マーカ位置情報に基づいて、前記移動体の位置を特定する移動体位置特定部と、をさらに備える請求項1または2に記載の移動体制御システム。
【請求項4】
前記移動体は飛行体であって、
前記飛行体の飛行経路を指定するフライトプランを取得するフライトプラン取得部と、
前記飛行体を制御する制御部と、をさらに備え、
前記制御部は、前記フライトプラン取得部によって取得された前記フライトプランに基づいて、前記飛行体を制御する請求項3に記載の移動体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の制御に用いられる移動体制御システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
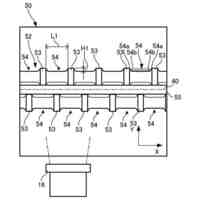
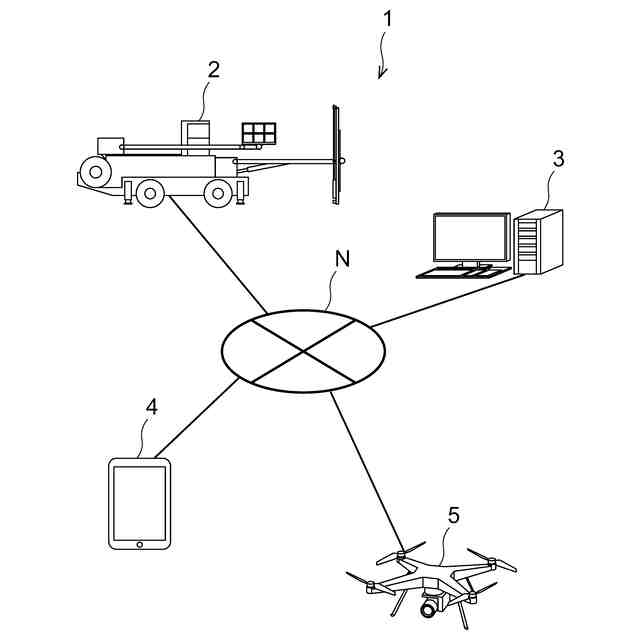
無人飛行体であるドローンをはじめとして、無人で移動することが可能な移動体は様々な分野で利用されている。例えば、トンネルにおいてもトンネル内の状態を確認するために所望の移動経路を自律して飛行が可能な無人飛行体の利用の試みが行われている。
【0003】
移動体の制御には制御システムが用いられており、例えば、飛行経路に沿って設けられたマーカを利用して、無人飛行体を自律飛行させるものが知られている(特許文献1)。
【0004】
移動体の制御において移動体自身の位置を認識することが求められており、GPS(Global Positioning System)やGNSS(Global Navigation Satellite System)などの衛星測位システムからの信号が届くところでは良いが、信号が届かないところにおいても移動体自身の位置の認識が要求される場合がある。この要求に対して、特許文献1では、飛行経路上の要所に設置したARマーカを無人飛行体が備えたカメラで捉えてARマーカの位置情報から無人飛行体自身の基準位置を認識している。
【先行技術文献】
【特許文献】
【0005】
特開2022-15978号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記特許文献1では、ARマーカの位置情報として緯度、経度、高度が与えられ記憶されている。
しかしながら、実際にARマーカの位置情報を与えるためには、設置したARマーカの測量を行って位置情報を取得する必要があり、この測量は、ユーザにとって負担となる。特に、掘削工事中のトンネルの場合には、掘削工事の支障になったり、相互に作業ができたとしても並列作業による危険性も増加したりする。
【0007】
このような課題を解決するために、発明者らは、トンネル掘削工事などにおいて構造物に設けられるロックボルトの設置において得られる位置情報に着目し、設けられるマーカの位置を示す情報を容易に取得し、当該情報に基づいて移動体自身の位置を認識することができる移動体制御システムを提供することを目的とした。
【課題を解決するための手段】
【0008】
手段1は、移動体の制御に用いられる移動体制御システムであって、構造物に設けられるロックボルトの位置を示す情報を含むロックボルト情報を取得するロックボルト情報取得部と、前記ロックボルト情報取得部が取得した前記ロックボルト情報に基づいて、前記ロックボルトに対応付けて設けられるマーカの位置を示す情報であるマーカ位置情報を算出するマーカ位置情報算出部と、を備える移動体制御システムである。
【0009】
手段2は、前記ロックボルトと前記マーカとの間の位置関係を示す情報を含むオフセット情報を取得するオフセット情報取得部をさらに備え、前記マーカ位置情報算出部は、前記オフセット情報取得部が取得した前記オフセット情報に基づいて、前記マーカ位置情報を算出する手段1に記載の移動体制御システムである。
【0010】
手段3は、前記マーカの画像を取得するマーカ画像取得部と、前記マーカ画像取得部によって取得された前記画像に基づいて、前記マーカのマーカ識別情報を判定するマーカ識別情報判定部と、前記マーカ識別情報判定部によって判定された前記マーカ識別情報に基づいて、前記マーカ位置情報算出部が算出した前記マーカ位置情報を取得するマーカ位置情報取得部と、前記マーカ位置情報取得部によって取得された前記マーカ位置情報に基づいて、前記移動体の位置を特定する移動体位置特定部と、をさらに備える手段1または2に記載の移動体制御システムである。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
戸田建設株式会社
免震システム
1か月前
戸田建設株式会社
移動体制御システム
7日前
戸田建設株式会社
ブラインド制御システム
11日前
戸田建設株式会社
底面型枠用テープの選定方法
11日前
戸田建設株式会社
半水石膏を主材とする充填材
1か月前
戸田建設株式会社
拡張現実表示システム及び方法
19日前
戸田建設株式会社
トンネル掘削機の地盤測定装置
19日前
戸田建設株式会社
鉄筋検査方法及び鉄筋検査装置
28日前
戸田建設株式会社
柱の接合構造及び柱の接合構造の構築方法
1日前
戸田建設株式会社
コンクリートのブリーディング水抑制方法
11日前
戸田建設株式会社
地震情報配信システム及び地震情報配信方法
11日前
戸田建設株式会社
長距離圧送方法及びコンクリート構造物の構築方法
1か月前
戸田建設株式会社
遮水機能を備えた自立壁および該自立壁の組み立て方法
11日前
戸田建設株式会社
CO2削減メディアシステム及びこれに用いる計測装置並びにCO2削減支援方法
18日前
株式会社豊田自動織機
自動走行体
12日前
株式会社FUJI
工作機械
1か月前
株式会社豊田自動織機
無人走行体
1日前
エイブリック株式会社
基準電流回路
1か月前
トヨタ自動車株式会社
制御システム
1か月前
オムロン株式会社
自律作業システム
1日前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
マーカースタンド
2か月前
株式会社豊田自動織機
自律走行車両
2か月前
オムロン株式会社
設計装置および設計方法
1日前
株式会社ダイフク
物品搬送設備
1日前
株式会社フカデン
外周部加工システム
22日前
株式会社デンソー
電子制御装置
11日前
大阪瓦斯株式会社
二次圧制御機構
29日前
株式会社デンソー
移動体制御装置
19日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
大阪瓦斯株式会社
二次圧制御機構
29日前
日立建機株式会社
自律走行システム
26日前
横河電機株式会社
電圧電流変換回路
2か月前
ニチコン株式会社
電源装置
2か月前
エンゼルグループ株式会社
無人搬送システム
2か月前
株式会社ダイフク
搬送設備の検査装置
29日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ