TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024126903
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023035650
出願日
2023-03-08
発明の名称
走行制御システムおよび走行制御方法
出願人
トヨタ自動車株式会社
,
学校法人幾徳学園
代理人
個人
,
個人
,
個人
主分類
B60W
30/08 20120101AFI20240912BHJP(車両一般)
要約
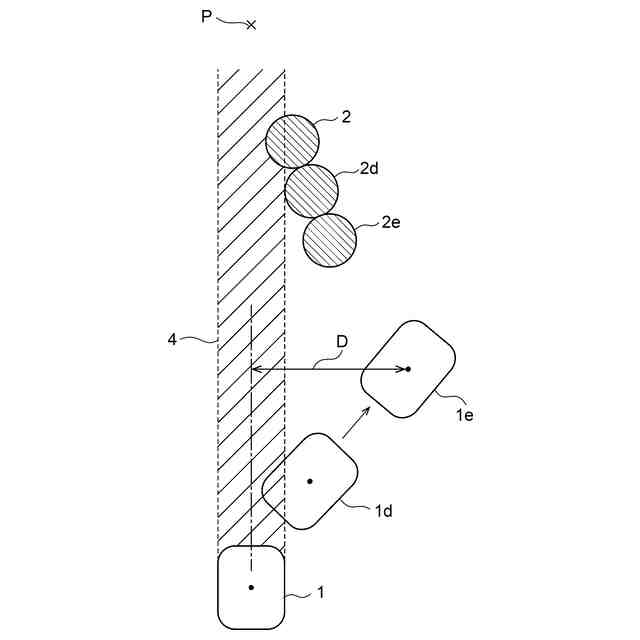
【課題】回避対象物に対する回避動作に移動体が時間をかけ過ぎることを抑える技術を提供する。
【解決手段】走行制御装置は、移動体の位置情報を取得する位置取得部と、移動体の目的地に関する情報を取得する目的地取得部と、移動体の位置情報および目的地に関する情報にもとづいて、走行の目標となる目標走行ラインを導出する経路導出部と、移動体が目標走行ラインを走行する際に障害となる回避対象物を検出する対象物検出部と、回避対象物が検出された場合に、回避対象物を回避するよう移動体を迂回させる回避動作を実行する走行制御部と、を備える。走行制御部は、所定の制限条件を満たした場合に、移動体の回避動作を制限する。
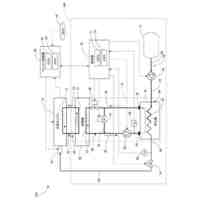
【選択図】図1
特許請求の範囲
【請求項1】
移動体の走行を制御する走行制御システムであって、
前記移動体の位置情報を取得する位置取得部と、
前記移動体の目的地に関する情報を取得する目的地取得部と、
前記移動体の位置情報および目的地に関する情報にもとづいて、走行の目標となる目標走行ラインを導出する経路導出部と、
前記移動体が目標走行ラインを走行する際に障害となる回避対象物を検出する対象物検出部と、
前記回避対象物が検出された場合に、前記回避対象物を回避するよう前記移動体を迂回させる回避動作を実行する走行制御部と、を備え、
前記走行制御部は、所定の制限条件を満たした場合に、前記移動体の回避動作を制限することを特徴とする走行制御システム。
続きを表示(約 700 文字)
【請求項2】
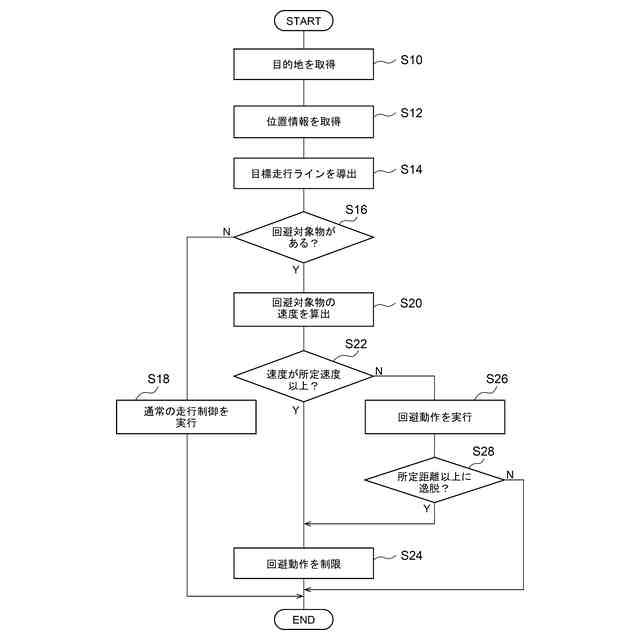
前記回避対象物の速度を算出する速度算出部をさらに備え、
前記走行制御部は、前記回避対象物の速度が所定車速以上である場合、所定の制限条件を満たすとして前記移動体の回避動作を制限することを特徴とする請求項1に記載の走行制御システム。
【請求項3】
前記所定車速は、前記移動体の速度または前記移動体が走行中の道幅をもとに可変に設定されることを特徴とする請求項2に記載の走行制御システム。
【請求項4】
前記走行制御部は、前記移動体の回避動作を実行しているときに、前記移動体の位置情報と前記移動体の回避動作を開始する際に導出された前記目標走行ラインとのずれが所定距離以上であれば、前記移動体の回避動作を制限することを特徴とする請求項1または2に記載の走行制御システム。
【請求項5】
移動体の走行を制御する走行制御装置を動作させる走行制御方法であって、
前記移動体の位置情報を取得するステップと、
前記移動体の走行の目標とする目標位置を取得するステップと、
前記移動体の位置情報および目標位置をもとに目標走行ラインを導出するステップと、
前記移動体が目標走行ラインを走行する際に障害となる回避対象物を検出するステップと、
前記回避対象物が検出された場合に、前記回避対象物を回避するよう前記移動体を迂回させる回避動作を実行するステップと、を備え、
前記回避動作を実行するステップでは、所定の制限条件を満たした場合に、前記移動体の回避動作を制限することを特徴とする走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、移動体の走行、とくに回避対象物に対する回避動作を制御する技術に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、ロボットの走行方向に存在する人間と連関する個人領域を認識し、認識された個人領域を回避するようにロボットの移動を制御するロボット制御方法が開示されている。この個人領域は、人間が停止している場合には人間を中心とする円形であり、人間が移動している場合には人間が移動する方向に延長する円錐形または楕円形である。
【先行技術文献】
【特許文献】
【0003】
特開2021-64372号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたロボット制御方法では、ロボットが人間の個人領域を回避するように移動するが、その回避のための移動に時間をかけ過ぎるおそれがある。
【0005】
本発明の目的は、回避対象物に対する回避動作に移動体が時間をかけ過ぎることを抑える技術を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明のある態様は、移動体の走行を制御する走行制御装置であって、移動体の位置情報を取得する位置取得部と、移動体の目的地に関する情報を取得する目的地取得部と、移動体の位置情報および目的地に関する情報にもとづいて、走行の目標となる目標走行ラインを導出する経路導出部と、移動体が目標走行ラインを走行する際に障害となる回避対象物を検出する対象物検出部と、回避対象物が検出された場合に、回避対象物を回避するよう移動体を迂回させる回避動作を実行する走行制御部と、を備える。走行制御部は、所定の制限条件を満たした場合に、移動体の回避動作を制限する。
【0007】
本発明の別の態様は、走行制御方法である。この方法は、移動体の走行を制御する走行制御装置を動作させる走行制御方法であって、移動体の位置情報を取得するステップと、移動体の走行の目標とする目標位置を取得するステップと、移動体の位置情報および目標位置をもとに目標走行ラインを導出するステップと、移動体が目標走行ラインを走行する際に障害となる回避対象物を検出するステップと、回避対象物が検出された場合に、回避対象物を回避するよう移動体を迂回させる回避動作を実行するステップと、を備える。回避動作を実行するステップでは、所定の制限条件を満たした場合に、移動体の回避動作を制限する。
【発明の効果】
【0008】
本発明によれば、回避対象物に対する回避動作に移動体が時間をかけ過ぎることを抑える技術を提供できる。
【図面の簡単な説明】
【0009】
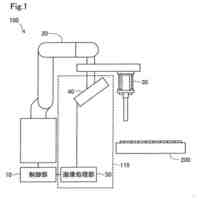
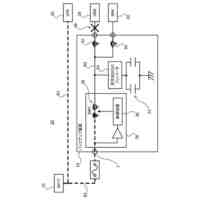
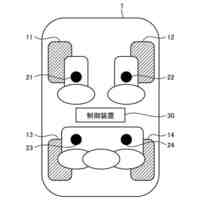
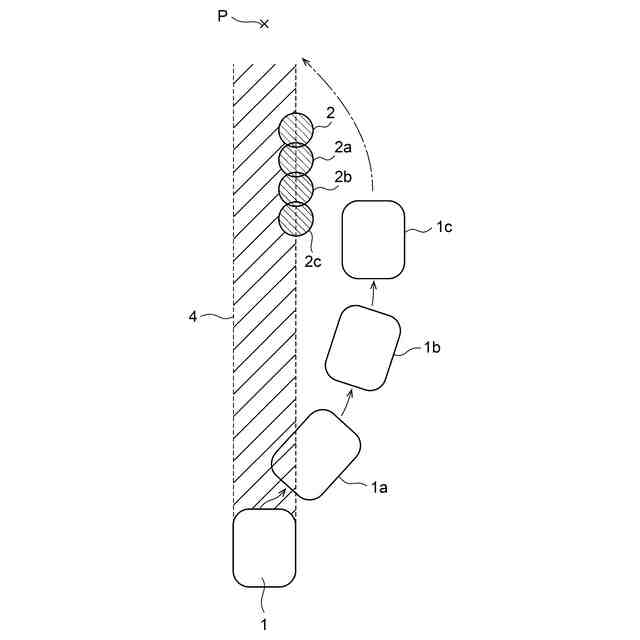
実施例の移動体の回避動作について説明するための図である。
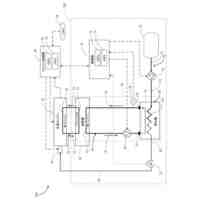
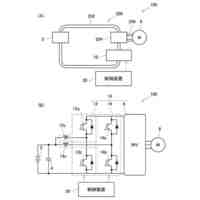
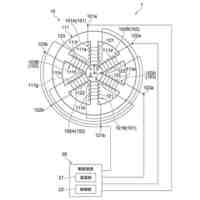
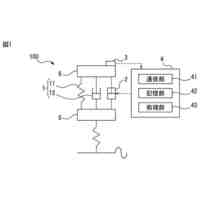
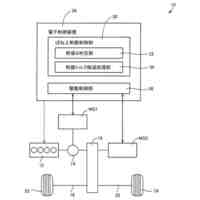
実施例の走行制御システムの機能構成を示す図である。
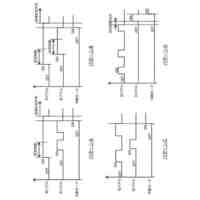
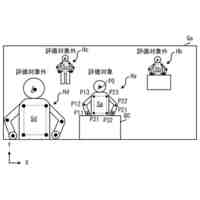
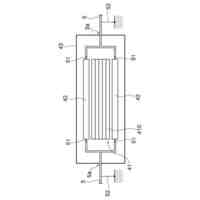
移動体の回避動作を制限する一態様について説明するための図である。
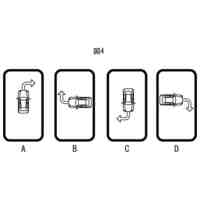
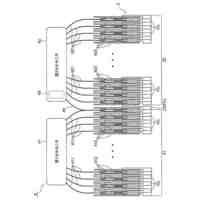
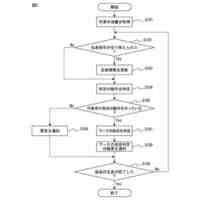
移動体が回避動作を実行する処理のフローチャートである。
【発明を実施するための形態】
【0010】
図1は、実施例の移動体1の回避動作について説明するための図である。移動体1は、歩行路や広場などを走行し、時速3~5キロメートル程度で自動的に走行可能である。移動体1は歩行者がいる路面を歩行者と同程度の速度で走行し、人は走行中に自由に乗降可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
2日前
トヨタ自動車株式会社
電極体
2日前
トヨタ自動車株式会社
検査装置
2日前
トヨタ自動車株式会社
回転電機
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
プログラム
2日前
トヨタ自動車株式会社
水素供給装置
2日前
トヨタ自動車株式会社
水素供給装置
2日前
トヨタ自動車株式会社
作業評価装置
2日前
トヨタ自動車株式会社
電圧監視装置
3日前
トヨタ自動車株式会社
作業監視方法
4日前
トヨタ自動車株式会社
水素供給装置
2日前
トヨタ自動車株式会社
電源システム
2日前
トヨタ自動車株式会社
搬送ロボット
2日前
トヨタ自動車株式会社
冷却システム
2日前
トヨタ自動車株式会社
冷却システム
2日前
トヨタ自動車株式会社
車両評価方法
2日前
トヨタ自動車株式会社
情報処理装置
2日前
トヨタ自動車株式会社
照度推定装置
3日前
トヨタ自動車株式会社
電源システム
3日前
トヨタ自動車株式会社
電池の製造方法
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
車両の制御装置
2日前
トヨタ自動車株式会社
充放電スタンド
2日前
トヨタ自動車株式会社
配向体製造装置
2日前
トヨタ自動車株式会社
交通量推定装置
4日前
トヨタ自動車株式会社
ドアミラー構造
3日前
トヨタ自動車株式会社
ファン制御装置
2日前
トヨタ自動車株式会社
電池の冷却装置
3日前
トヨタ自動車株式会社
車両制振システム
2日前
トヨタ自動車株式会社
電力変換システム
2日前
トヨタ自動車株式会社
電力変換システム
2日前
トヨタ自動車株式会社
ガス供給システム
2日前
トヨタ自動車株式会社
車両制振制御装置
3日前
トヨタ自動車株式会社
永久磁石式電動機
3日前
トヨタ自動車株式会社
ラミネート型電池
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ