TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024123622
公報種別
公開特許公報(A)
公開日
2024-09-12
出願番号
2023031196
出願日
2023-03-01
発明の名称
制御装置、制御方法及びコンピュータプログラム
出願人
ブラザー工業株式会社
代理人
個人
,
個人
主分類
G05B
19/19 20060101AFI20240905BHJP(制御;調整)
要約
【課題】動力源からの動力の供給先を切り替える毎に、各制御対象の位置を記憶することなく、各制御対象の所在位置を求めることができる工作機械の制御装置等を提供する。
【解決手段】制御装置は、ワーク又は主軸の移動を行う複数の移動部と、前記複数の移動部に動力を供給する単一の動力源とを備え、前記動力源からの動力の供給先を一の前記移動部から他の前記移動部に切り替え可能な工作機械の制御装置であって、前記一の移動部の基準位置に紐づいており、前記動力源の所在位置との差分に基づいて前記一の移動部の所在位置を求める為の基準値を記憶する記憶部と、前記他の移動部の移動を実行する場合、前記動力源の駆動量に応じて、前記記憶部に記憶された前記基準値を前記基準位置への紐づけを維持して更新する更新部とを備える。
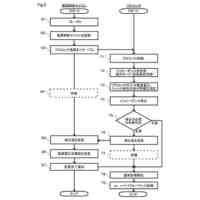
【選択図】図10
特許請求の範囲
【請求項1】
ワーク又は主軸の移動を行う複数の移動部と、前記複数の移動部に動力を供給する単一の動力源とを備え、前記動力源からの動力の供給先を一の前記移動部から他の前記移動部に切り替え可能な工作機械の制御装置であって、
前記一の移動部の基準位置に紐づいており、前記動力源の所在位置との差分に基づいて前記一の移動部の所在位置を求める為の基準値を記憶する記憶部と、
前記他の移動部の移動を実行する場合、前記動力源の駆動量に応じて、前記記憶部に記憶された前記基準値を前記基準位置への紐づけを維持して更新する更新部と
を備える制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記基準値はパルス値を含み、
前記他の移動部の移動量を位置からパルス値に変換する変換部を備え、
前記更新部は、前記変換部にて変換した前記他の移動部の移動量のパルス値を前記基準値に対して加算又は減算する
請求項1に記載の制御装置。
【請求項3】
前記更新部にて前記基準値を更新した後、前記一の移動部の所在位置を求める場合、更新後の前記基準値と、前記動力源の所在位置との差分を導出する
請求項1又は2に記載の制御装置。
【請求項4】
前記工作機械は、
前記動力源からの動力の供給先を切り替える場合に係合する係合部及び被係合部と、
前記係合部又は前記被係合部を係合可能な位置に位置決めする位置決め部と
を備え、
前記動力源からの動力の供給先を前記一の移動部から前記他の移動部に切り替える場合、前記位置決め部による位置決め後、前記係合部又は前記被係合部の係合を実行する実行部を備える
請求項1又は2に記載の制御装置。
【請求項5】
前記工作機械は、前記移動部の移動に連動して相対移動し、係合時に前記動力源からの動力の供給先を切り替え可能な係合部及び被係合部を備え、
前記係合部及び前記被係合部は複数の位置にて係合可能であり、
前記動力源からの動力の供給先を切り替える場合、前記係合部及び前記被係合部が係合可能な位置にあるか否か判定する判定部と、
前記判定部にて係合可能な位置にあると判定する場合、前記係合部及び前記被係合部の係合を実行する第一係合実行部と、
前記判定部にて係合可能な位置にないと判定する場合、前記係合部及び前記被係合部の係合可能な位置までの前記係合部及び前記被係合部の移動を実行する移動実行部と、
前記移動実行部による移動後、前記係合部及び前記被係合部の係合を実行する第二係合実行部と
を備える請求項1又は2に記載の制御装置。
【請求項6】
前記移動実行部は、前記判定部にて係合可能な位置にないと判定された場合、前記係合部及び前記被係合部の所在位置に最も近い係合可能な位置までの前記係合部及び前記被係合部の移動を実行する請求項5に記載の制御装置。
【請求項7】
前記工作機械は、前記移動部の移動に連動して相対移動し、係合時に前記動力源からの動力の供給先を切り替え可能な係合部及び被係合部を備え、
前記動力源からの動力の供給先を切り替える場合、前記係合部及び前記被係合部が係合可能な位置にあるか否か判定する判定部と、
前記判定部にて係合可能な位置にあると判定する場合、前記係合部及び前記被係合部の係合を実行する係合実行部と、
前記判定部にて係合可能な位置にないと判定する場合、係合不可の報知を実行する報知実行部と
を備える請求項1又は2に記載の制御装置。
【請求項8】
ワーク又は主軸の移動を行う複数の移動部と、前記複数の移動部に動力を供給する単一の動力源とを備え、前記動力源からの動力の供給先を一の前記移動部から他の前記移動部に切り替え可能な工作機械の制御方法であって、
前記一の移動部の基準位置に紐づいており、前記動力源の所在位置との差分に基づいて前記一の移動部の所在位置を求める為の基準値を記憶し、
前記他の移動部の移動を実行する場合、前記動力源の駆動量に応じて、記憶した前記基準値を前記基準位置への紐づけを維持して更新する
制御方法。
【請求項9】
ワーク又は主軸の移動を行う複数の移動部と、前記複数の移動部に動力を供給する単一の動力源とを備え、前記動力源からの動力の供給先を一の前記移動部から他の前記移動部に切り替え可能な工作機械の制御装置にて実行可能なコンピュータプログラムであって、
前記制御装置に、
前記一の移動部の基準位置に紐づいており、前記動力源の所在位置との差分に基づいて前記一の移動部の所在位置を求める為の基準値を記憶し、
前記他の移動部の移動を実行する場合、前記動力源の駆動量に応じて、記憶した前記基準値を前記基準位置への紐づけを維持した状態で更新する
処理を実行させるコンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本技術は、工作機械の制御装置、制御方法及びコンピュータプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
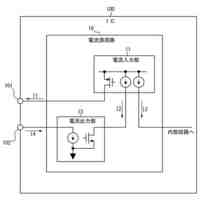
単一のサーボモータと第一制御対象部又は第二制御対象部との接続を制御する数値制御装置がある。数値制御装置は、サーボモータと第一制御対象部との接続を解除した場合、解除時点での第一制御対象部の位置(以下、接続解除位置)を記憶する。数値制御装置はサーボモータを第二制御対象部に接続する。サーボモータは第二制御対象部を駆動する。数値制御装置は第二制御対象部の駆動中、サーボモータが第一制御対象部に接続していると仮定した場合における第一制御対象部の移動量を演算し、第一制御対象部の仮想的な位置(以下、仮想位置)を記憶する。
【0003】
第二制御対象部の駆動が終了し、サーボモータを第一制御対象部に接続する場合、サーボモータを第一制御対象部に接続する前に、数値制御装置は仮想位置と接続解除位置との差分を演算し、差分が0になるまでサーボモータを駆動する。差分が0になった場合、サーボモータの位置は第一制御対象部に接続可能な位置となる。
【先行技術文献】
【特許文献】
【0004】
特許第5919329号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1において、数値制御装置はサーボモータの接続先を切り替える毎に、各制御対象の位置を記憶する。
【0006】
本開示は斯かる事情に鑑みてなされたものであり、動力源からの動力の供給先を切り替える毎に、各制御対象の位置を記憶することなく、各制御対象の所在位置を求めることができる工作機械の制御装置、制御方法及びコンピュータプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示の一実施形態に係る制御装置は、ワーク又は主軸の移動を行う複数の移動部と、前記複数の移動部に動力を供給する単一の動力源とを備え、前記動力源からの動力の供給先を一の前記移動部から他の前記移動部に切り替え可能な工作機械の制御装置であって、前記一の移動部の基準位置に紐づいており、前記動力源の所在位置との差分に基づいて前記一の移動部の所在位置を求める為の基準値を記憶する記憶部と、前記他の移動部の移動を実行する場合、前記動力源の駆動量に応じて、前記記憶部に記憶された前記基準値を前記基準位置への紐づけを維持して更新する更新部とを備える。
【0008】
本開示においては、他の移動部が移動する場合、動力源の駆動量に応じて、基準値を基準位置への紐づけを維持した状態で更新する。
【0009】
本開示の一実施形態に係る制御装置は、前記基準値はパルス値を含み、前記他の移動部の移動量を位置からパルス値に変換する変換部を備え、前記更新部は、前記変換部にて変換した前記他の移動部の移動量のパルス値を前記基準値に対して加算又は減算する。
【0010】
本開示においては、他の移動部の移動量を位置からパルス値に変換し、変換した他の移動部の移動量のパルス値を基準値に加算又は減算して、基準値を更新する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
定電圧回路
2か月前
株式会社FUJI
工作機械
21日前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
トヨタ自動車株式会社
制御システム
1か月前
トヨタ自動車株式会社
移動システム
2か月前
井関農機株式会社
自立走行農作業車
2か月前
日昌電気制御株式会社
管理システム
1か月前
株式会社ユタカ
半自動切換装置
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社ダイフク
搬送設備
20日前
トヨタ自動車株式会社
マーカースタンド
1か月前
横河電機株式会社
電流源回路
2か月前
株式会社豊田自動織機
自律走行車両
1か月前
株式会社フカデン
外周部加工システム
9日前
大阪瓦斯株式会社
二次圧制御機構
16日前
日立建機株式会社
自律走行システム
13日前
個人
ペダル操作検知装置
2か月前
大阪瓦斯株式会社
二次圧制御機構
16日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
ミツミ電機株式会社
半導体集積回路装置
1か月前
株式会社デンソー
移動体制御装置
6日前
横河電機株式会社
電圧電流変換回路
1か月前
ニチコン株式会社
電源装置
1か月前
株式会社ダイフク
搬送設備の検査装置
16日前
株式会社デンソー
車両用電子制御装置
1か月前
トヨタ自動車株式会社
充電装置
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
トヨタ自動車株式会社
適合システム及び適合方法
19日前
トヨタ自動車株式会社
適合システム及び適合方法
19日前
株式会社FUJI
工作機械
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ