TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120945
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2024102265,2023019201
出願日
2024-06-25,2019-08-30
発明の名称
作業車両
出願人
井関農機株式会社
代理人
主分類
A01B
69/00 20060101AFI20240829BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】
後方障害物検知手段による作業機の誤検知を防止することにより、効率よく作業できる作業車両を提供する。
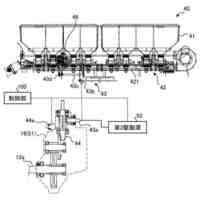
【解決手段】
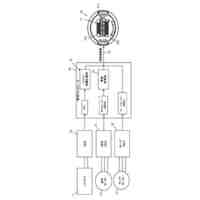
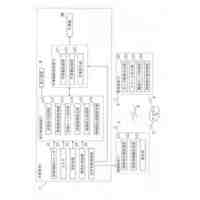
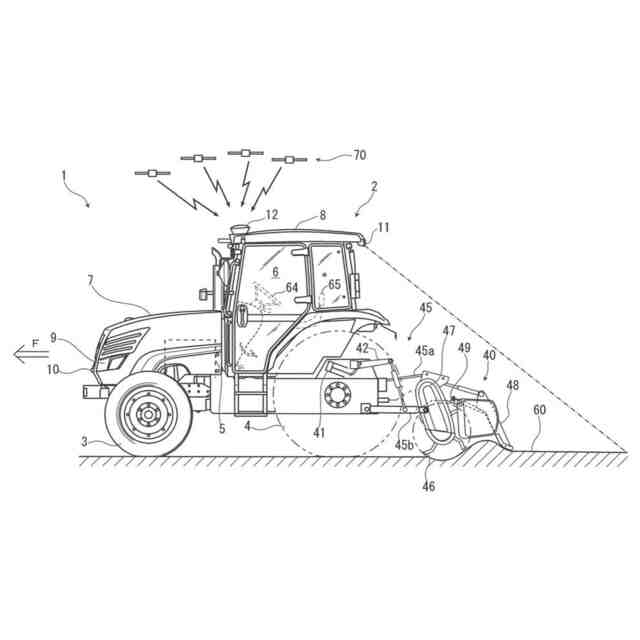
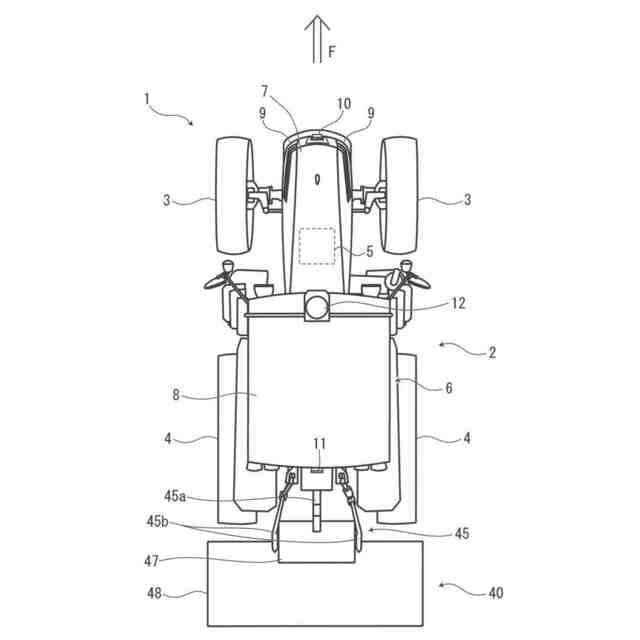
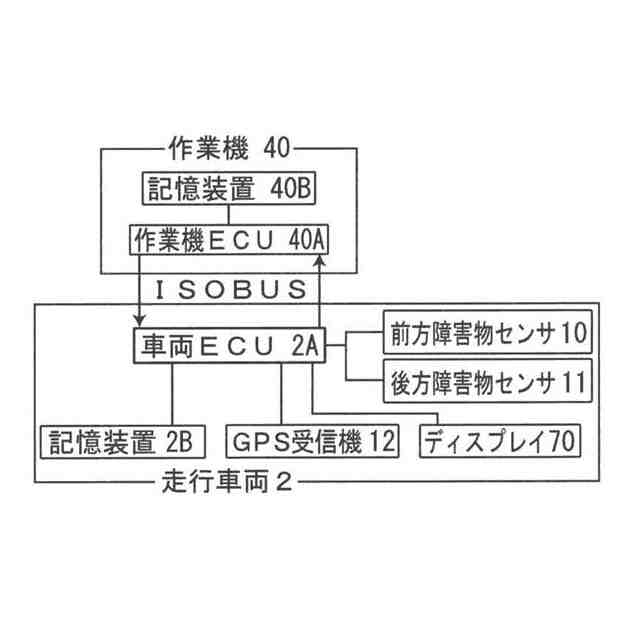
走行車両2と、前記走行車両2の後部に取り付けられる作業機40と、前記走行車両2に取り付けられ、後方の障害物を検知する後方障害物検知手段11と、前記走行車両2に取り付けられ、前記後方障害物検知手段11の検知範囲を設定する車両制御部2Aと、入力装置および表示装置である端末装置50を備え、前記車両制御部2Aが設定した前記後方障害物検知手段11の検知範囲の補正に必要な前記作業機40の寸法の場所を端末装置50に表示するとともに、端末装置50に寸法データを入力すると前記後方障害物検知手段11の検知範囲を寸法データに基づいて補正する。
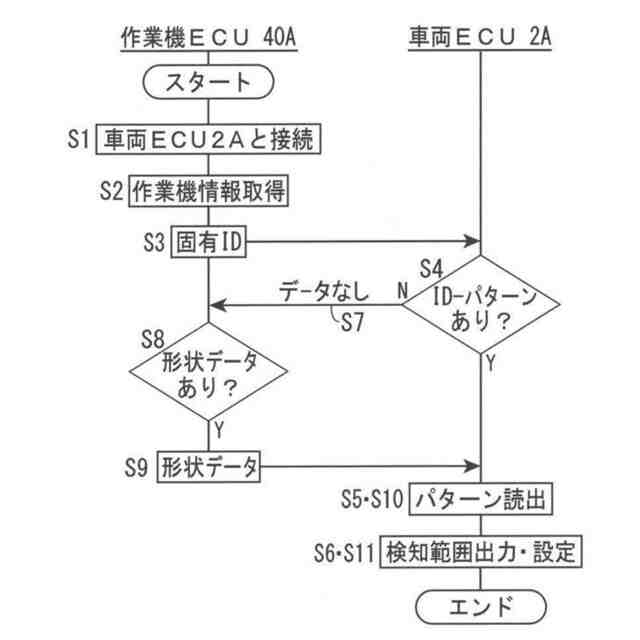
【選択図】図5
特許請求の範囲
【請求項1】
走行車両と、
前記走行車両の後部に取り付けられる作業機と
、
前
記走行車両に取り付けられ、後方の障害物を検知する後方障害物検知手段と、
前記走行車両に取り付けられ、前記後方障害物検知手段の検知範囲を設定する車両制御部
と、
入力装置および表示装置である端末装置を備え、
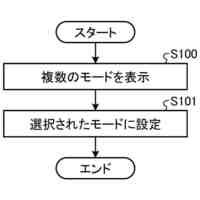
前記車両制御部が設定した前記後方障害物検知手段の検知範囲の補正に必要な前記作業機の寸法の場所を端末装置に表示するとともに、
端末装置に寸法データを入力すると前記後方障害物検知手段の検知範囲を寸法データに基づいて補正する
ことを特徴とする作業車両。
続きを表示(約 370 文字)
【請求項2】
前記寸法データを入力する端末装置に前記車両制御部が設定した前記後方障害物検知手段の検知範囲のパターンを表示する
ことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記車両制御部は前記作業機の形状に応じて異なる前記後方障害物検知手段の検知範囲のパターンを設定し、
前記後方障害物検知手段の検知範囲の補正に必要な前記作業機の寸法の場所は前記パターンによってそれぞれ異なることを特徴とする請求項2に記載の作業車両。
【請求項4】
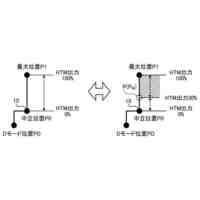
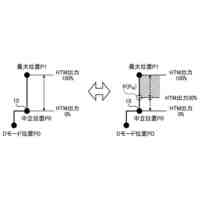
中央部分に他の部分よりも高い部材が取り付けれた作業機が取り付けられた場合に、検知可能範囲の左右方向における中央部分が制限されたパターンを前記後方障害物検知手段の検知範囲のパターンとすることを特徴とする請求項1から3のいずれか一項に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車両に関するものである。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
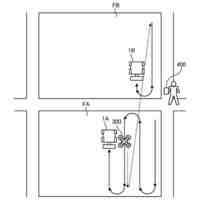
従来、衛星測位システムを利用して機体の位置を測位しながら、設定作業エリア内を自律走行する農業用作業車両で、障害物検知手段を備えた農業用作業車両が知られている。例えば、特許文献1には、機体の位置算出手段と、障害物を検知する障害物検知手段と、障害物検知手段の感度を調整する感度調整手段を備え、設定作業エリア内では障害物検知手段の感度を高く調整し、設定作業エリア外では感度を低く調整することにより、設定作業エリア外に存在する障害物を検知手段が検知して走行が停止してしまう事態を防ぐ自立走行作業車両が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2015-191592
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載された作業車両においては、作業車両の後部に取り付けられた作業機の形状によっては、作業車両の後方を監視する後方障害物検知手段が作業機を障害物と判断(誤検知)し、作業車両が走行を停止したり、警報を発したりすることがあり、作業効率が低下する場合があった。
【0005】
したがって、本発明は、後方障害物検知手段による作業機の誤検知を防止することにより、効率よく作業できる作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明のかかる目的は、走行車両と、前記走行車両の後部に取り付けられる作業機と
、前
記走行車両に取り付けられ、後方の障害物を検知する後方障害物検知手段と、前記走行車両に取り付けられ、前記後方障害物検知手段の検知範囲を設定する車両制御部
と、入力装置および表示装置である端末装置を備え、前記車両制御部が設定した前記後方障害物検知手段の検知範囲の補正に必要な前記作業機の寸法の場所を端末装置に表示するとともに、
端末装置に寸法データを入力すると前記後方障害物検知手段の検知範囲を寸法データに基づいて補正する
ことを特徴とする作業車両によって達成される。
【0007】
本発明によれば、
端末装置に後方障害物検知手段の検知範囲の補正に必要な場所が表示されるため、どの寸法を入力すればよいのか確認して入力できるため、正確に検知範囲を補正して、後方障害物検知手段による作業機の誤検知を防止することにより、効率よく作業できる
。
【0008】
本発明の好ましい実施態様においては、
前記寸法データを入力する端末装置に前記車両制御部が設定した前記後方障害物検知手段の検知範囲のパターンを表示する
。
【0009】
本発明のこの好ましい実施態様によれば、
設定した後方障害物検知手段の検知範囲のパターンを確認して寸法を入力できるため、正確に検知範囲を補正して、後方障害物検知手段による作業機の誤検知を防止することにより、効率よく作業できる
。
【0010】
本発明のさらに好ましい実施態様においては、
前記車両制御部は前記作業機の形状に応じて異なる前記後方障害物検知手段の検知範囲のパターンを設定し、前記後方障害物検知手段の検知範囲の補正に必要な前記作業機の寸法の場所は前記パターンによってそれぞれ異なる
。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
田植機
1か月前
井関農機株式会社
収穫機
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業装置
1か月前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
29日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
22日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
21日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
20日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
乗用芝刈機
21日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
6日前
井関農機株式会社
コンバイン
1か月前
井関農機株式会社
歩行型管理機
1か月前
井関農機株式会社
乗用型苗植機
20日前
井関農機株式会社
汎用コンバイン
1か月前
井関農機株式会社
農薬散布作業車
29日前
井関農機株式会社
乗用型苗移植機
1か月前
井関農機株式会社
営農管理システム
1か月前
井関農機株式会社
ロボット作業車両
今日
井関農機株式会社
作業管理システム
1か月前
井関農機株式会社
ロボット作業車両
20日前
井関農機株式会社
作業機管理システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ