TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024111359
公報種別
公開特許公報(A)
公開日
2024-08-19
出願番号
2023015785
出願日
2023-02-06
発明の名称
光測距装置
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
G01S
7/481 20060101AFI20240809BHJP(測定;試験)
要約
【課題】レンズアレイを用いてスキャンする光測距装置において、受光素子での受光信号の低下を抑制して検出精度を向上させる技術を提供する。
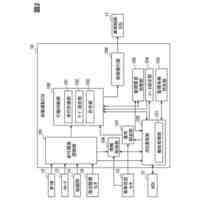
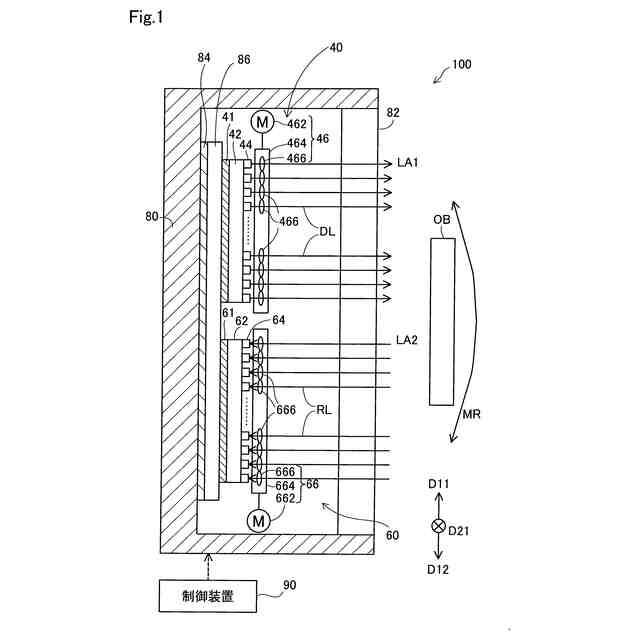
【解決手段】測距装置100は、パルス光DLを発光する複数の発光素子44と、複数の発光素子のそれぞれに対応する複数の発光側レンズ466を同一平面上に配列して備える発光側レンズアレイ464、および発光側レンズアレイを移動させる発光側駆動部462を含み、パルス光を走査する発光側走査部46と、物体OBによって反射されたパルス光の反射光RLを受光する複数の受光素子64と、受光素子で受光された反射光の飛行時間を用いて、物体までの距離を算出する算出部924と、を備える。
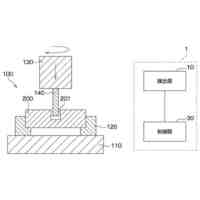
【選択図】図1
特許請求の範囲
【請求項1】
光測距装置(100,100b)であって、
パルス光(DL)を発光する複数の発光素子(44)と、
前記複数の発光素子のそれぞれに対応する複数の発光側レンズ(466)を同一平面上に配列して備える発光側レンズアレイ(464)、および前記発光側レンズアレイを移動させる発光側駆動部(462)を含み、前記パルス光を走査する発光側走査部(46)と、
物体(OB)によって反射された前記パルス光の反射光(RL)を受光する複数の受光素子(64)と、
前記受光素子で受光された前記反射光の飛行時間を用いて、前記物体までの距離を算出する算出部(924)と、を備える、
光測距装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の光測距装置であって、
第一発光側レンズ(466p,466s)によって形成されるパルス光の照射範囲(H1)と、前記第一発光側レンズに隣接する第二発光側レンズ(466q,466t)によって形成されるパルス光の照射範囲(H2)とが互いに接するように構成されている、
光測距装置。
【請求項3】
さらに、前記第一発光側レンズと前記第二発光側レンズとの間の距離が、前記第一発光側レンズの半径以下の距離である、請求項2に記載の光測距装置。
【請求項4】
請求項1に記載の光測距装置であって、
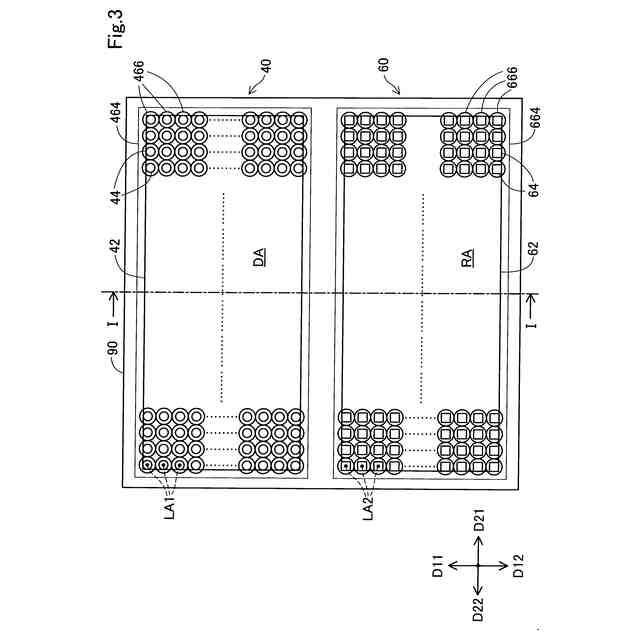
前記複数の発光素子は、同一平面上の予め定められた発光範囲(DA)に配列され、
前記複数の受光素子は、同一平面上の予め定められた受光範囲(RA)に配列され、
前記受光範囲の面積は、前記発光範囲の面積よりも大きい、
光測距装置。
【請求項5】
請求項1に記載の光測距装置であって、
さらに、前記複数の受光素子のそれぞれに対応する複数の受光側レンズ(666)を同一平面上に配列して備える受光側レンズアレイ(664)、および前記受光側レンズアレイを移動させる受光側駆動部(662)を含む受光側走査部(66)を備える、
光測距装置。
【請求項6】
請求項5に記載の光測距装置であって、
第一受光側レンズ(666p)によって形成される反射光の受光範囲(HR1)と、前記第一受光側レンズに隣接する第二受光側レンズ(666q)によって形成される反射光の受光範囲(HR2)とが互いに接するように構成されている、
光測距装置。
【請求項7】
さらに、前記第一受光側レンズと前記第二受光側レンズとの間の距離が、前記第一受光側レンズの半径以下の距離である、請求項6に記載の光測距装置。
【請求項8】
請求項1に記載の光測距装置であって、
さらに、前記発光素子および前記発光側走査部を制御可能な制御部(922)を備え、
前記制御部は、前記発光素子の発光と、前記発光側レンズアレイの移動とを交互に実行する、
光測距装置。
【請求項9】
請求項1に記載の光測距装置であって、
さらに、前記発光素子および前記発光側走査部を制御可能な制御部(922)を備え、
前記制御部は、前記発光側レンズアレイを移動させながら、前記発光素子を発光させる、
光測距装置。
【請求項10】
請求項1に記載の光測距装置であって、
さらに、前記発光素子および前記発光側走査部を制御可能な制御部(922)を備え、
前記複数の発光側レンズは、奇数列と偶数列とを有する格子状に配列され、
前記制御部は、前記奇数列に属する発光側レンズに対応する前記発光素子と、前記偶数列に属する発光側レンズに対応する前記発光素子とを交互に発光させる、
光測距装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、光測距装置に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
レーザ光を発生させる発光素子と、物体で反射されたレーザ光の戻り光を受光する受光素子とを備える光測距装置が知られている。例えば、特許文献1には、レーザ光を透過する単数の発光側レンズ、および戻り光を透過する単数の受光側レンズを備えるレンズユニットをリニアモータによって左右に移動させることで、レーザ光を光測距装置の前方で左右方向に走査する光測距装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2007-198951号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、レンズユニットを左右に移動させると、受光側レンズの端部に入射する戻り光の屈折度が大きくなるため、受光素子の近傍で像のひずみが発生することがある。この場合には、受光素子の受光量が低下し、検出精度が低下する可能性がある。そのため、レーザ光をレンズの移動により走査する光測距装置において、検出精度を向上させる技術が望まれている。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、光測距装置(100,100b)が提供される。この光測距装置は、パルス光(DL)を発光する複数の発光素子(44)と、前記複数の発光素子のそれぞれに対応する複数の発光側レンズ(466)を同一平面上に配列して備える発光側レンズアレイ(464)、および前記発光側レンズアレイを移動させる発光側駆動部(462)を含み、前記パルス光を走査する発光側走査部(46)と、物体(OB)によって反射された前記パルス光の反射光(RL)を受光する複数の受光素子(64)と、前記受光素子で受光された前記反射光の飛行時間を用いて、前記物体までの距離を算出する算出部(924)と、を備える。
【0007】
この形態の光測距装置によれば、複数の発光素子および複数の発光側レンズを備えることにより、発光視野を複数に分割することができ、単数の発光側レンズのみを備える光測距装置と比較して、発光側レンズ一つあたりの収差による像のひずみを小さくすることができる。したがって、受光素子での受光信号の低下を抑制することができ、光測距装置の検出精度を向上させることができる。
【図面の簡単な説明】
【0008】
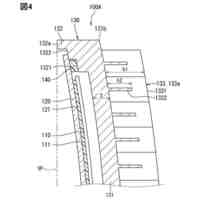
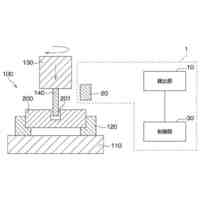
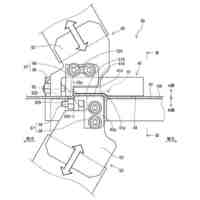
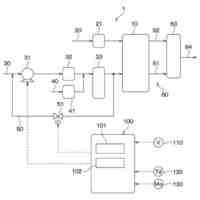
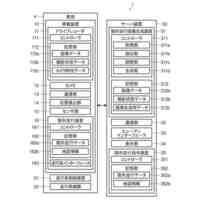
第1実施形態に係る光測距装置の概略構成を断面視で示す説明図。
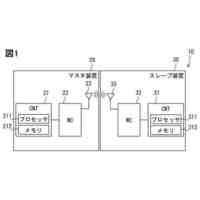
制御装置の機能構成を示すブロック図。
発光部および受光部の構成を平面視で示す説明図。
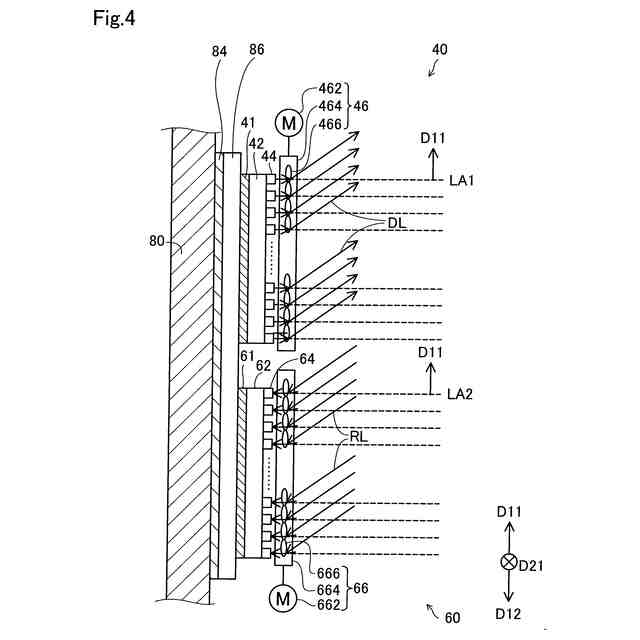
発光側レンズアレイおよび受光側レンズアレイが上側に移動された状態を断面視で示す説明図。
発光側レンズアレイおよび受光側レンズアレイが上側に移動された状態を平面視で示す説明図。
発光側レンズアレイおよび受光側レンズアレイが下側に移動された状態を断面視で示す説明図。
発光側レンズアレイおよび受光側レンズアレイが下側に移動された状態を平面視で示す説明図。
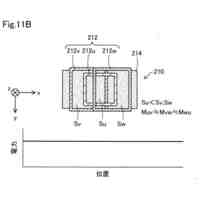
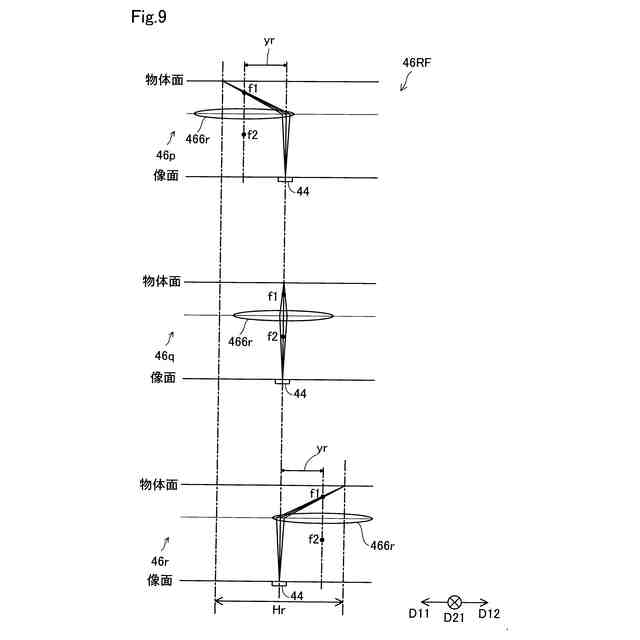
発光側レンズアレイの光学的な構成を示す説明図。
比較例としての発光側レンズアレイの光学的な構成を示す説明図。
受光側レンズアレイの光学的な構成を示す説明図。
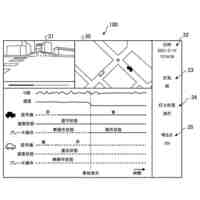
発光側走査部および受光側走査部のスキャン方法を概念的に示す説明図。
発光側走査部および受光側走査部の移動と、発光および受光タイミングとを示すタイミングチャート。
他の実施形態における発光側レンズアレイの光学的な構成を示す説明図。
他の実施形態における発光側走査部および受光側走査部の移動と、発光および受光タイミングとを示すタイミングチャート。
第2実施形態に係る光測距装置の概略構成を断面視で示す説明図。
第2実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す説明図。
第2実施形態に係る光測距装置の発光側レンズアレイが上側に移動された状態を示す説明図。
第2実施形態に係る光測距装置の発光側レンズアレイが下側に移動された状態を側面視で示す説明図。
第3実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す第1の説明図。
第3実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す第2の説明図。
他の実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す第1の説明図。
他の実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す第2の説明図。
第4実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す説明図。
第5実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す説明図。
他の実施形態に係る光測距装置の発光側走査部および受光側走査部のスキャン方法を概念的に示す第3の説明図。
【発明を実施するための形態】
【0009】
A1.第1実施形態:
図1に示す光測距装置100は、レーザ光DLを発光し、対象物OBによって反射された反射光RLを受光することによって、対象物OBまでの距離を検出する。本実施形態において、光測距装置100は、LiDAR(Light Detection And Ranging)である。光測距装置100は、例えば、車両に搭載されて、車両の周囲に存在する物体の距離を測定するために使用される。光測距装置100は、発光部40と、受光部60と、発光部40および受光部60を収容する筐体80と、制御装置90とを備えている。筐体80は、レーザ光DLを透過する窓部82を備えている。
【0010】
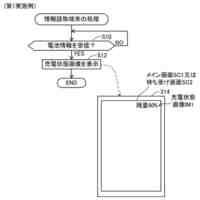
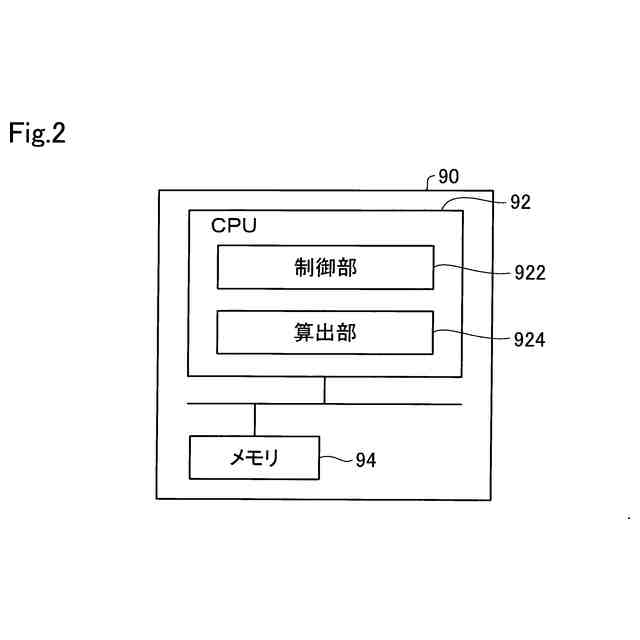
図2に示すように、制御装置90は、中央演算処理装置としてのCPU92と、ROMやRAM等のメモリ94とを備えるコンピュータとして構成されている。メモリ94には、制御部922および算出部924など、本実施形態において提供される各機能を実現するためのプログラムが格納されており、各機能は、CPU92によってプログラムが実行されることによって実現される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
表示装置
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1日前
株式会社デンソー
表示装置
1日前
株式会社デンソー
光学部材
1日前
株式会社デンソー
半導体装置
今日
株式会社デンソー
換気システム
1日前
株式会社デンソーエレクトロニクス
電流遮断装置
1日前
株式会社デンソー
車両用表示装置
1日前
株式会社デンソー
非接触給電装置
1日前
株式会社デンソー
移動体制御装置
1日前
株式会社デンソー
半導体メモリ装置
1日前
株式会社デンソー
空燃比センサ制御装置
1日前
株式会社デンソー
工具異常検出システム
今日
株式会社デンソー
工具異常検出システム
今日
株式会社デンソー
半導体装置の製造方法
今日
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソー
導体線の成形装置及び成形方法
今日
株式会社デンソー
燃料電池システム、水素生成装置
1日前
トヨタ自動車株式会社
電池パック
1日前
株式会社デンソー
無線通信システム及び無線通信方法
1日前
株式会社デンソー
車両用表示装置および画像表示方法
1日前
株式会社デンソー
車両用制御装置及び車両用制御方法
1日前
株式会社デンソー
車両用制御装置及び車両用制御方法
1日前
株式会社デンソー
熱輸送装置および半導体モジュール
今日
株式会社デンソー
炭化珪素半導体装置およびその製造方法
4日前
ダイハツ工業株式会社
循環水の回路構造
1日前
株式会社デンソー
車両制御装置、車両制御方法、プログラム
1日前
株式会社デンソー
レバー部材、ワイパレバーアッセンブリ及びワイパブレード
1日前
トヨタ自動車株式会社
情報処理装置、情報処理方法及びプログラム
1日前
株式会社デンソーテン
隊列走行画像生成装置、隊列走行画像生成システム、及び隊列走行画像生成方法
1日前
株式会社デンソーウェーブ
充電システム、携帯端末、携帯端末のためのコンピュータプログラム、及び、充電器
1日前
株式会社デンソーテン
情報処理装置、および情報処理方法
1日前
株式会社デンソー
走行中非接触給電システム及び非接触給電装置
1日前
トヨタ自動車株式会社
車両衝突情報記録システム、車両衝突情報記録方法及び車両衝突情報記録プログラム
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ