TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024099767
公報種別
公開特許公報(A)
公開日
2024-07-25
出願番号
2024073095,2023502003
出願日
2024-04-26,2021-02-26
発明の名称
制御装置、制御方法及び制御システム
出願人
日本電気株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
E02F
9/26 20060101AFI20240718BHJP(水工;基礎;土砂の移送)
要約
【課題】対象物を掘削しやすい状態にすることによって作業効率の向上を図ること。
【解決手段】対象物を掘削しやすい形状に形成するために対象物をどこへ移動すればよいかを特定して指示するために、制御方法は、堆積した対象物の堆積状況に関する情報を取得する取得工程と、取得した堆積状況に関する情報を参照して、掘削対象領域における、対象物の移動先を特定する特定工程と、移動先に対象物を移動するよう掘削機に指示する指示工程とを含む制御方法。
【選択図】なし
特許請求の範囲
【請求項1】
堆積した対象物の堆積状況に関する情報を取得する取得工程と、
前記堆積状況に応じた移動先であって、掘削対象領域における前記対象物の移動先を特定する特定工程と、
前記移動先に前記対象物を移動するよう掘削機に指示する指示工程と、
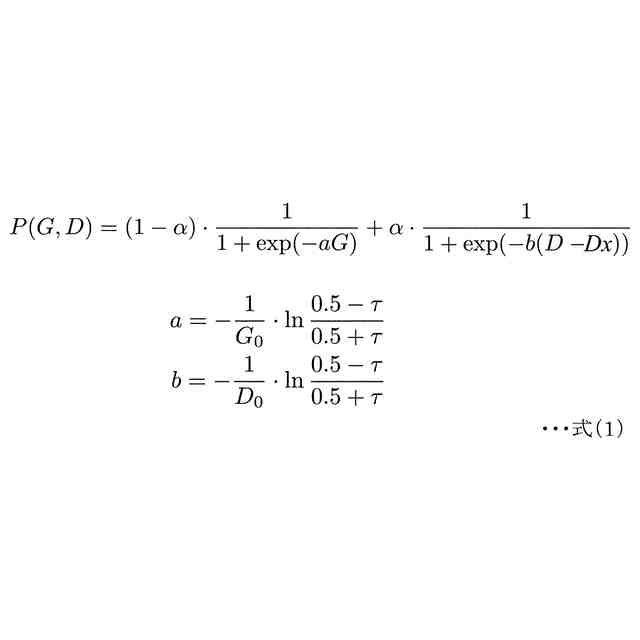
前記堆積状況に関する情報を参照して、前記掘削機の自己位置を基準に前記掘削機のバケットが通過しうる範囲における前記対象物の掘削容易性を評価する評価工程と、を含み、
前記特定工程では、前記掘削容易性を参照して、前記移動先を特定する、
制御方法。
続きを表示(約 1,100 文字)
【請求項2】
前記堆積状況に関する情報は、前記対象物の高さと、前記対象物の高さの勾配に関する情報とを含み、
前記評価工程では、前記掘削容易性を、前記対象物の高さと、前記対象物の高さの勾配とを参照して評価する、
請求項1に記載の制御方法。
【請求項3】
前記評価工程では、前記掘削容易性を、掘削範囲の高さの平均勾配に関する評価値と、前記掘削範囲の遠位置の平均高さ及び前記掘削対象領域の平均高さに関する評価値と、を参照して評価する、
請求項2に記載の制御方法。
【請求項4】
前記特定工程では、複数の移動先候補のうち、前記評価工程での掘削容易性の評価結果が相対的に低い移動先候補を前記移動先として特定する、
請求項1から3の何れか1項に記載の制御方法。
【請求項5】
前記対象物の移動先は、前記掘削対象領域内の前記対象物の高さが他の位置よりも低い位置である、
請求項1から4の何れか1項に記載の制御方法。
【請求項6】
前記掘削対象領域は、前記対象物が堆積した領域のうち、掘削が可能な領域である、
請求項1から5の何れか1項に記載の制御方法。
【請求項7】
堆積した対象物の堆積状況に関する情報を取得する取得手段と、
前記堆積状況に応じた移動先であって、掘削対象領域における前記対象物の移動先を特定する特定手段と、
前記移動先に前記対象物を移動するよう掘削機に指示する指示手段と、
前記堆積状況に関する情報を参照して、前記掘削機の自己位置を基準に前記掘削機のバケットが通過しうる範囲における前記対象物の掘削容易性を評価する評価手段と、を備え、
前記特定手段は、前記掘削容易性を参照して、前記移動先を特定する、
制御装置。
【請求項8】
前記堆積状況に関する情報は、前記対象物の高さと、前記対象物の高さの勾配に関する情報とを含み、
前記評価手段は、前記掘削容易性を、前記対象物の高さと、前記対象物の高さの勾配とを参照して評価する、
請求項7に記載の制御装置。
【請求項9】
前記評価手段は、前記掘削容易性を、掘削範囲の高さの平均勾配に関する評価値と、前記掘削範囲の遠位置の平均高さ及び前記掘削対象領域の平均高さに関する評価値と、を参照して評価する、
請求項8に記載の制御装置。
【請求項10】
前記特定手段は、複数の移動先候補のうち、前記評価手段の掘削容易性の評価結果が相対的に低い移動先候補を前記移動先として特定する、
請求項7から9のいずれか1項に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置、制御方法及び制御システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
少子高齢化による労働者人口の減少や労働力不足による作業負荷の増大への対応として、ロボットの活用が注目されている。例えば、建設業では、省人化による生産性の向上が急務となっており、建設機械を用いた作業の自動化に大きな期待が寄せられている。
【0003】
例えば、特許文献1には、複数の地点のそれぞれについて平滑化された高さから平滑化された現況地形を決定し、その現況地形に基づいて決定された仮想設計地形に沿って作業機を移動させる制御システムが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-021348号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
作業の現場において、作業機械を用いた掘削作業を行う場合、掘削対象物を掘削しやすい状態にしたうえで掘削することができれば、作業効率の向上を図ることができるが、そのような制御技術は知られていなかった。
【0006】
例えば、特許文献1に記載された技術は、仮想設計地形に沿って作業機を移動させることはできるが、対象物を掘削しやすい状態にすることを目的とするものではない。
【0007】
本発明の一態様は、対象物を掘削しやすい状態にすることによって作業効率の向上を図ることのできる技術を提供することである。
【課題を解決するための手段】
【0008】
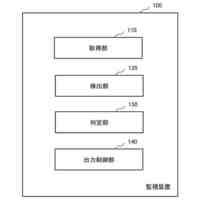
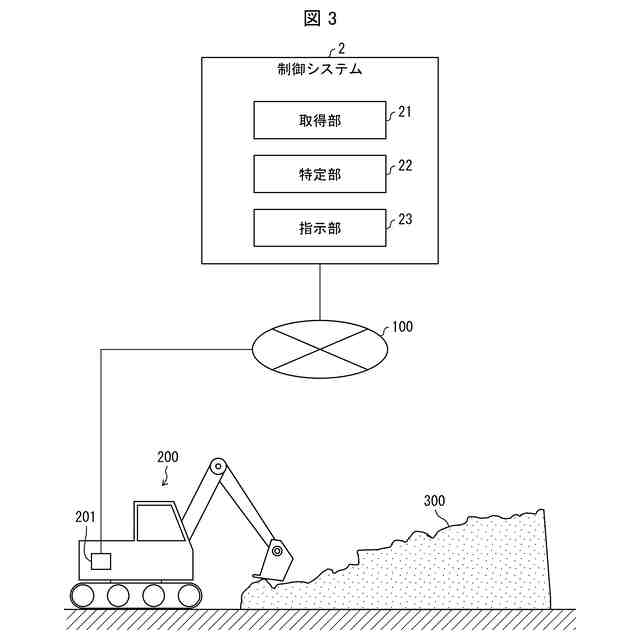
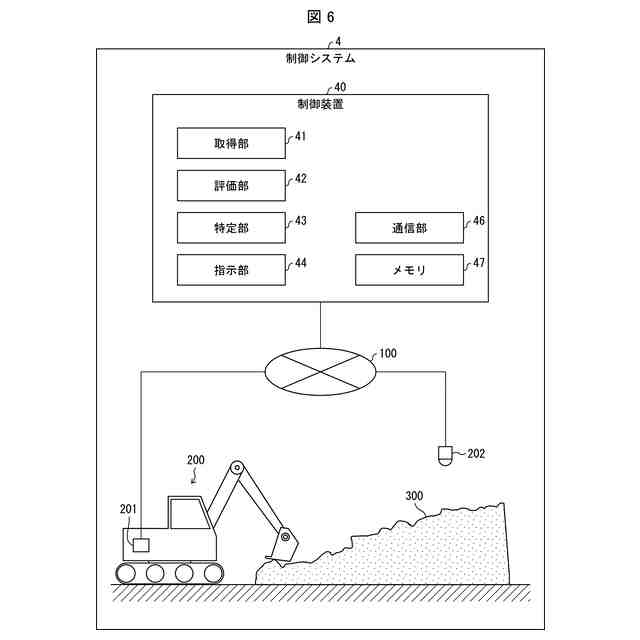
本発明の一側面に係る制御装置は、堆積した対象物の堆積状況に関する情報を取得する取得手段と、前記堆積状況に応じた移動先であって、掘削対象領域における前記対象物の移動先を特定する特定手段と、前記移動先に前記対象物を移動するよう掘削機に指示する指示手段と、前記堆積状況に関する情報を参照して、前記掘削機の自己位置を基準に前記掘削機のバケットが通過しうる範囲における前記対象物の掘削容易性を評価する評価手段と、を備え、前記特定手段は、前記掘削容易性を参照して、前記移動先を特定する。
【0009】
本発明の一側面に係る制御方法は、堆積した対象物の堆積状況に関する情報を取得する取得工程と、前記堆積状況に応じた移動先であって、掘削対象領域における前記対象物の移動先を特定する特定工程と、前記移動先に前記対象物を移動するよう掘削機に指示する指示工程と、前記堆積状況に関する情報を参照して、前記掘削機の自己位置を基準に前記掘削機のバケットが通過しうる範囲における前記対象物の掘削容易性を評価する評価工程と、を含み、前記特定工程では、前記掘削容易性を参照して、前記移動先を特定する。
【0010】
本発明の一側面に係る制御システムは、堆積した対象物の堆積状況に関する情報を取得する取得手段と、前記堆積状況に応じた移動先であって、掘削対象領域における前記対象物の移動先を特定する特定手段と、前記移動先に前記対象物を移動するよう掘削機に指示する指示手段と、前記堆積状況に関する情報を参照して、前記掘削機の自己位置を基準に前記掘削機のバケットが通過しうる範囲における前記対象物の掘削容易性を評価する評価手段と、を備え、前記特定手段は、前記掘削容易性を参照して、前記移動先を特定する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本電気株式会社
量子デバイス
3日前
日本電気株式会社
フィードスルー構造、及び水中機器
5日前
日本電気株式会社
監視装置、監視方法、及びプログラム
6日前
日本電気株式会社
移動手配装置、移動手配方法及びプログラム
3日前
日本電気株式会社
遠隔巡視システム、遠隔巡視方法、プログラム
2日前
日本電気株式会社
システム構成導出装置およびシステム構成導出方法
2日前
NECプラットフォームズ株式会社
薄型アンテナ
3日前
日本電気株式会社
監視装置、監視システム、監視方法、およびプログラム
5日前
日本電気株式会社
近似解探索装置、近似解探索方法および近似解探索プログラム
5日前
日本電気株式会社
情報処理システム、情報処理方法、プログラム、エッジ、及び、オーケストレータ
2日前
日本電気株式会社
画像処理システム、画像処理方法及びプログラム
3日前
日本電気株式会社
CADライセンス管理装置、CADライセンス管理装置の制御方法、および、CADライセンス管理装置の制御プログラム
3日前
生企工営株式会社
ツース盤
10日前
個人
回転埋設先端拡大翼杭
16日前
株式会社 林物産発明研究所
堤防装置
26日前
株式会社パルパルス
環境保全資材
9日前
日立造船株式会社
サクション基礎
23日前
株式会社 林物産発明研究所
マンホール蓋
26日前
株式会社トラバース
拡底型の鋼管杭
3日前
積水ハウス株式会社
配筋支持具
26日前
株式会社N-Seed
吹付工法
18日前
日立建機株式会社
作業車両
24日前
日立建機株式会社
作業車両
18日前
株式会社クボタ
フロントローダ
23日前
住友重機械工業株式会社
ショベル
12日前
日立建機株式会社
深礎掘削機
6日前
住友重機械工業株式会社
ショベル
17日前
株式会社丸島アクアシステム
除塵装置
3日前
大成建設株式会社
基礎構造
18日前
SUS株式会社
ユニットハウス用基礎
6日前
西部電機株式会社
水門開閉装置
16日前
鹿島建設株式会社
キャップおよび種子よけ構造
13日前
大和ハウス工業株式会社
スラブ構築方法
2日前
西松建設株式会社
作業機械及び操縦方法
16日前
日立建機株式会社
建設機械
4日前
日本建設技術株式会社
盛土造成構造
9日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ