TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024092009
公報種別
公開特許公報(A)
公開日
2024-07-05
出願番号
2024074273,2023139620
出願日
2024-05-01,2019-12-05
発明の名称
自律走行装置、自律走行システム、自律走行方法、及び自律走行プログラム
出願人
オムロン株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/648 20240101AFI20240628BHJP(制御;調整)
要約
【課題】自律走行装置の走行経路を生成する作業者の作業効率を向上させることが可能な自律走行システム、自律走行方法、及び自律走行プログラムを提供する。
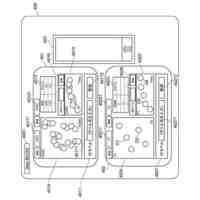
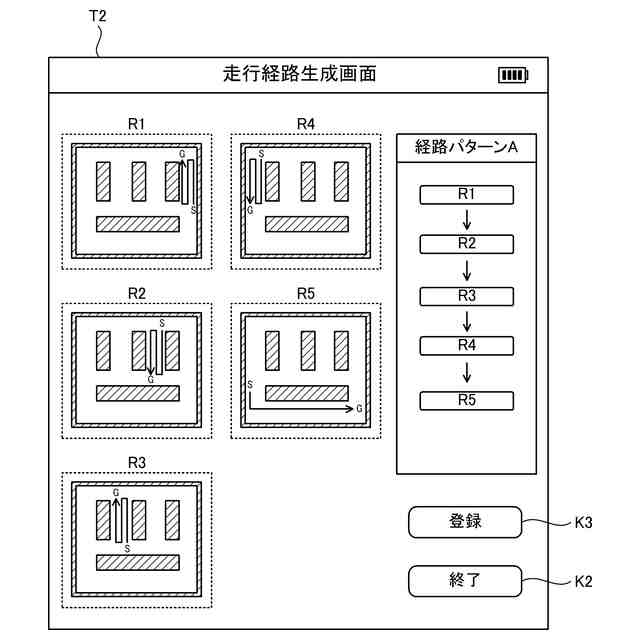
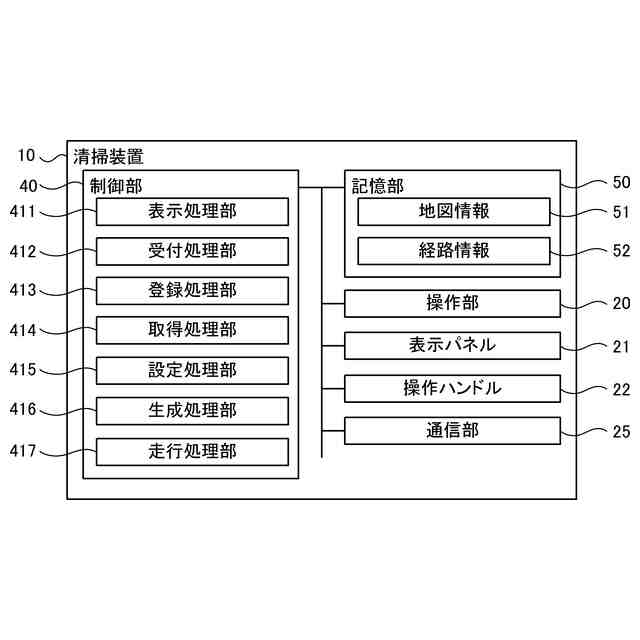
【解決手段】清掃装置10は、作業者からティーチング操作を受け付ける受付処理部412と、前記ティーチング操作に対応する個別走行経路を記憶部50に登録する登録処理部413と、記憶部50に登録される複数の前記個別走行経路のうち作業者に選択される複数の前記個別走行経路を取得する取得処理部414と、取得される複数の前記個別走行経路のそれぞれに順番を設定する設定処理部415と、取得される複数の前記個別走行経路と設定される複数の前記個別走行経路のそれぞれの前記順番とに基づいて走行経路を生成する生成処理部416と、を備える。
【選択図】図11
特許請求の範囲
【請求項1】
走行経路に基づいて自律走行装置を走行させる自律走行システムであって、
作業者から前記自律走行装置を教示走行させる教示操作を受け付ける受付処理部と、
前記受付処理部により受け付けられる前記教示操作に対応する個別走行経路を記憶部に登録する登録処理部と、
前記記憶部に登録される複数の前記個別走行経路のうち作業者に選択される複数の前記個別走行経路を取得する取得処理部と、
前記取得処理部により取得される複数の前記個別走行経路のそれぞれに順番を設定する設定処理部と、
前記取得処理部により取得される複数の前記個別走行経路と前記設定処理部により設定される複数の前記個別走行経路のそれぞれの前記順番とに基づいて前記走行経路を生成する生成処理部と、
を備える自律走行システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な自律走行装置を走行させる自律走行システム、自律走行方法、及び自律走行プログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
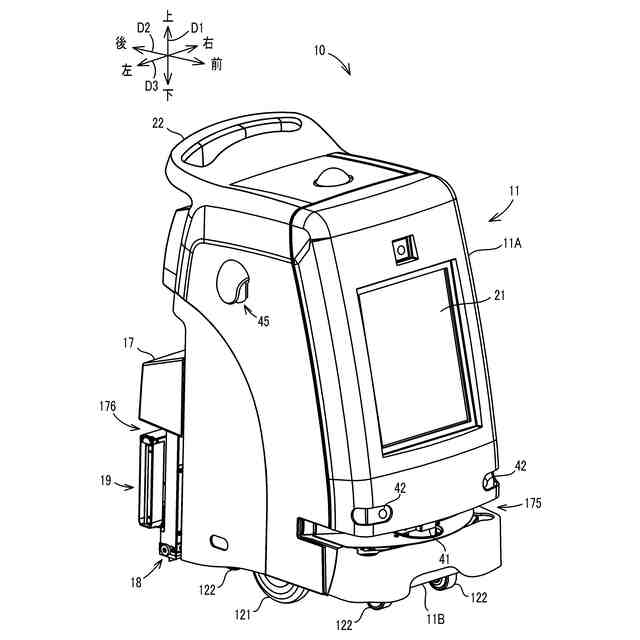
近年、労働力不足や人件費の高騰などにより、駅や空港などにおけるコンコースや、ショッピングモールなどの広範囲なスペースを清掃する清掃要員が不足している。そのため、自律走行可能に設計され、高い清掃能力と高い安全性を有する産業用の自律走行型の清掃ロボット(自律走行装置)の導入が進んでいる。
【0003】
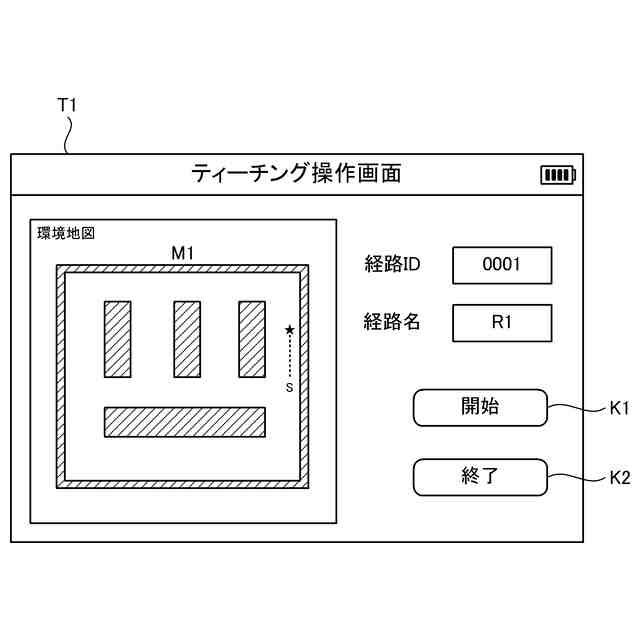
この種の自律走行装置の中には、作業者の操作に基づいて走行経路を教示させる教示機能(ティーチング機能)を備えるものがある(例えば特許文献1参照)。例えば、作業者は、経路教示モードに設定して、作業エリアにおいて自律走行装置を運転操作しながら所望の経路を走行させて自律走行装置が走行した走行経路(軌跡)を記憶させる。自律走行装置は、自律走行モードに設定されると、経路教示モードで記憶された前記走行経路を再現走行する。これにより、作業者の操作(教示操作)に基づいて生成された走行経路に従って自律走行装置を自律的に走行させることが可能になる。
【先行技術文献】
【特許文献】
【0004】
特開2017-182175号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の自律走行装置では、自律走行装置に教示させた走行経路の一部、例えば教示走行開始地点から教示走行終了地点までの間の一部を修正したい場合に、作業者は、再度、自律走行装置を教示走行開始地点から教示走行終了地点まで運転操作して走行経路を記憶し直す必要がある。このため、自律走行装置の走行経路を生成する作業者の作業効率が低下する問題が生じる。
【0006】
本発明の目的は、自律走行装置の走行経路を生成する作業者の作業効率を向上させることが可能な自律走行システム、自律走行方法、及び自律走行プログラムを提供することにある。
【課題を解決するための手段】
【0007】
本発明の一の局面に係る自律走行システムは、走行経路に基づいて自律走行装置を走行させる自律走行システムである。前記自律走行システムは、作業者から前記自律走行装置を教示走行させる教示操作を受け付ける受付処理部と、前記受付処理部により受け付けられる前記教示操作に対応する個別走行経路を記憶部に登録する登録処理部と、前記記憶部に登録される複数の前記個別走行経路のうち作業者に選択される複数の前記個別走行経路を取得する取得処理部と、前記取得処理部により取得される複数の前記個別走行経路のそれぞれに順番を設定する設定処理部と、前記取得処理部により取得される複数の前記個別走行経路と前記設定処理部により設定される複数の前記個別走行経路のそれぞれの前記順番とに基づいて前記走行経路を生成する生成処理部と、を備える。
【0008】
この構成によれば、作業エリアの走行経路を複数の個別走行経路に分割して記憶部に登録することができる。このため、作業者により選択される複数の個別走行経路を連結することにより、所望の走行経路を容易に生成することが可能となる。また、生成した走行経路の一部を修正したい場合には、修正箇所に対応する個別走行経路を新たに生成した個別走行経路に入れ替えることにより、前記走行経路を修正することができる。このため、生成した走行経路の一部を修正する必要が生じた場合に、前記走行経路を一から全て作り直す必要がない。よって、自律走行装置の走行経路を生成する作業者の作業効率を向上させることが可能となる。
【0009】
前記自律走行システムでは、前記登録処理部は、前記受付処理部が前記教示操作の開始指示を受け付けてから前記教示操作の終了指示を受け付けるまでの期間に前記自律走行装置が走行する経路を前記個別走行経路として前記記憶部に登録してもよい。また前記自律走行システムでは、前記登録処理部は、前記教示操作ごとに前記個別走行経路を前記記憶部に登録してもよい。
【0010】
これにより、記憶部50には、前記教示操作ごとの複数の個別走行経路が登録される。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
オムロン株式会社
保護装置
6日前
オムロン株式会社
光センサ
5日前
オムロン株式会社
表示装置
5日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
近接センサ
6日前
オムロン株式会社
光電センサ
6日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
電磁継電器
6日前
オムロン株式会社
作業指示装置
6日前
オムロン株式会社
トリガスイッチ
6日前
オムロン株式会社
自律作業システム
6日前
オムロン株式会社
生体信号計測装置
6日前
オムロン株式会社
生体信号計測装置
6日前
オムロン株式会社
生体信号計測装置
6日前
オムロン株式会社
センサ及び検出方法
6日前
オムロン株式会社
設計装置および設計方法
6日前
オムロン株式会社
電力変換装置及び制御装置
6日前
オムロン株式会社
位置計測装置、位置計測方法
6日前
オムロン株式会社
方法、プログラムおよび装置
6日前
オムロン株式会社
X線検査装置及びその制御方法
9日前
オムロン株式会社
センサシステム及びセンサ装置
6日前
オムロン株式会社
情報処理装置、プログラム及び方法
6日前
オムロン株式会社
制御装置、制御方法及びプログラム
6日前
オムロン株式会社
システム、端末装置及びプログラム
6日前
オムロン株式会社
処理装置、監視方法及びプログラム
6日前
オムロン株式会社
情報処理装置及び位置計測システム
6日前
オムロン株式会社
サーボドライバ及びサーボシステム
6日前
オムロン株式会社
制御装置、制御方法およびプログラム
6日前
オムロン株式会社
時刻同期装置、方法およびプログラム
6日前
オムロン株式会社
コントローラ及びロボットの制御方法
6日前
オムロン株式会社
データ生成装置およびデータ生成方法
6日前
オムロン株式会社
データ生成装置およびデータ生成方法
6日前
オムロン株式会社
情報処理装置、方法およびプログラム
6日前
オムロン株式会社
制御装置、制御方法及び制御プログラム
6日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ