TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085085
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199422
出願日
2022-12-14
発明の名称
シミュレーションシステムおよびシミュレーション方法
出願人
オムロン株式会社
代理人
弁理士法人深見特許事務所
主分類
G05B
19/418 20060101AFI20240619BHJP(制御;調整)
要約
【課題】シミュレーションの全行程のうちの一部分を実行する技術を提供する。
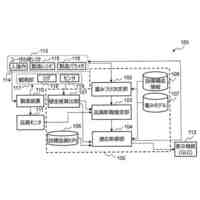
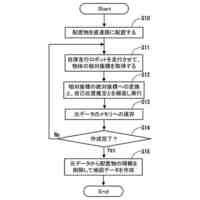
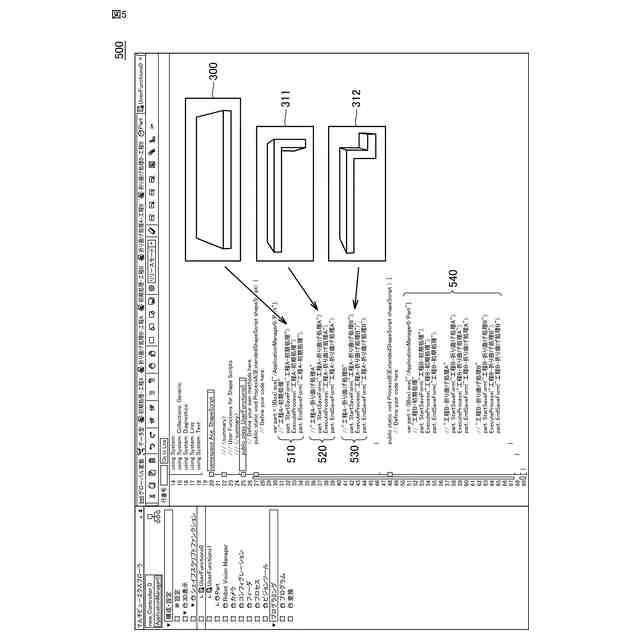
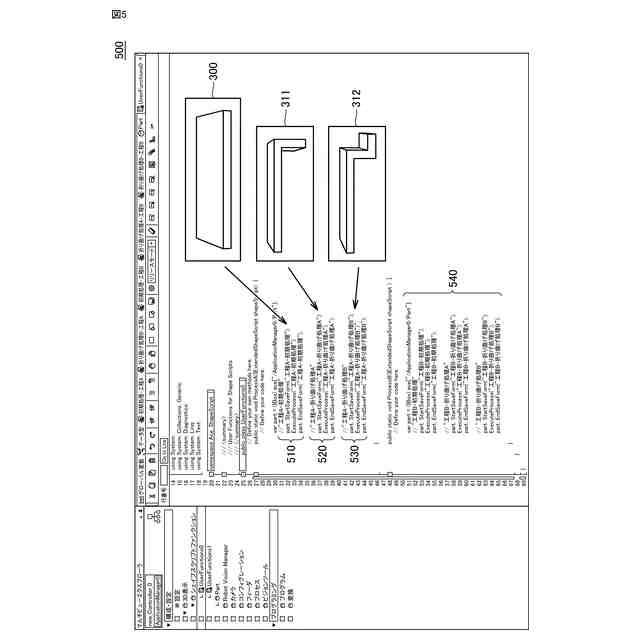
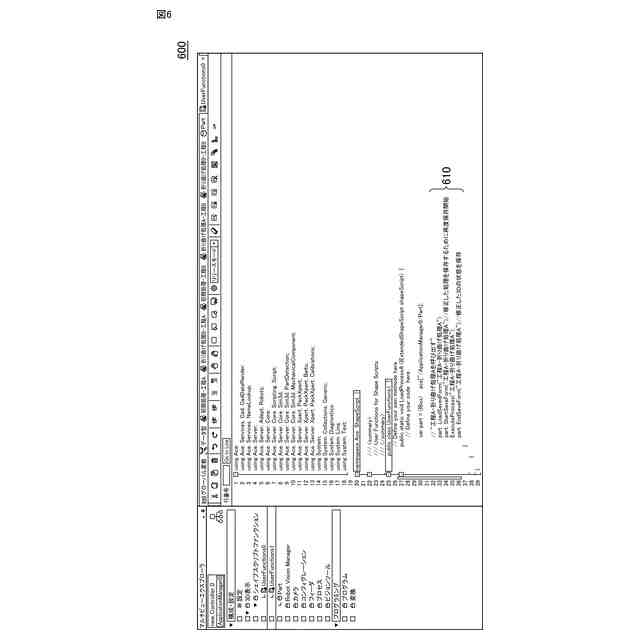
【解決手段】シミュレーションシステムは、シミュレータを格納するストレージと、シミュレータを実行するプロセッサとを備える。プロセッサは、複数の工程からなるワークの加工処理のシミュレーションを実行し、シミュレーションの実行中に、シミュレーションの状態情報を保存し510,520,530,540、シミュレーションの実行後に、複数の工程のうちの1つの工程を指定する実行コードの入力を受け付けたことに基づいて、状態情報を参照し、指定された1つの工程からワークの加工処理を実行する。
【選択図】図5
特許請求の範囲
【請求項1】
シミュレータを格納するストレージと、
前記シミュレータを実行するプロセッサとを備え、
前記プロセッサは、
複数の工程からなるワークの加工処理のシミュレーションを実行し、
前記シミュレーションの実行中に、前記シミュレーションの状態情報を保存し、
前記シミュレーションの実行後に、前記複数の工程のうちの1つの工程を指定する実行コードの入力を受け付けたことに基づいて、前記状態情報を参照し、指定された前記1つの工程から前記ワークの加工処理を実行する、シミュレーションシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記状態情報は、前記シミュレーション中の前記ワークの形状と、前記ワークの加工プログラムの変数情報とを含み、
前記変数情報は、工程を識別する情報と、各工程内で実行されるタスクの状態を管理する情報とを含む、請求項1に記載のシミュレーションシステム。
【請求項3】
前記複数の工程は、第1の工程と、前記第1の工程の次に実行される第2の工程とを含み、
前記複数の工程のうちの前記1つの工程を指定する前記実行コードの入力を受け付けたことに基づいて、指定された前記1つの工程から前記ワークの加工処理を実行することは、
前記第2の工程を指定する前記実行コードの入力を受け付けたことに基づいて、前記第1の工程の完了直後の前記ワークの形状を再現することと、
前記ワークの加工プログラムに、前記第2の工程で使用される前記変数情報を渡すことを含む、請求項2に記載のシミュレーションシステム。
【請求項4】
前記ワークの前記複数の工程からなる前記加工処理の前記シミュレーションを実行することは、
仮想的な制御装置に、前記ワークの加工プログラムを実行させることと、
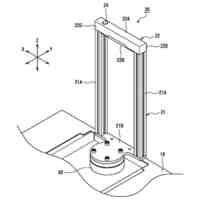
前記仮想的な制御装置によって制御された1つ以上の仮想的な機械により、前記ワークを加工することとを含み、
前記シミュレーションの実行中に、前記シミュレーションの状態情報を保存することは、前記タスクを実行中に、前記ワークの形状と、前記変数情報とを更新することを含む、請求項2に記載のシミュレーションシステム。
【請求項5】
前記実行コードは、前記ワークの加工プログラムとは異なる、テキストベースのプログラムコードまたはグラフィカルプログラムのコードである、請求項2に記載のシミュレーションシステム。
【請求項6】
前記複数の工程のうちの前記1つの工程を指定する前記実行コードの入力を受け付けたことに基づいて、指定された前記1つの工程から前記ワークの加工処理を実行することは、
前記1つの工程内の1つのタスクを指定する前記実行コードの入力を受け付けることと、
前記1つのタスクを指定されたことに基づいて、前記ワークの加工プログラムを、指定された前記1つのタスクから実行することとを含む、請求項2~5のいずれかに記載のシミュレーションシステム。
【請求項7】
コンピュータによって実行されるシミュレーション方法であって、
複数の工程からなるワークの加工処理のシミュレーションを実行するステップと、
前記シミュレーションの実行中に、前記シミュレーションの状態情報を保存するステップと、
前記シミュレーションの実行後に、前記複数の工程のうちの1つの工程を指定する実行コードの入力を受け付けたことに基づいて、前記状態情報を参照し、指定された前記1つの工程から前記ワークの加工処理を実行するステップとを含む、シミュレーション方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、シミュレーションシステムに関し、より特定的には、シミュレーションを部分的に実行する技術に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
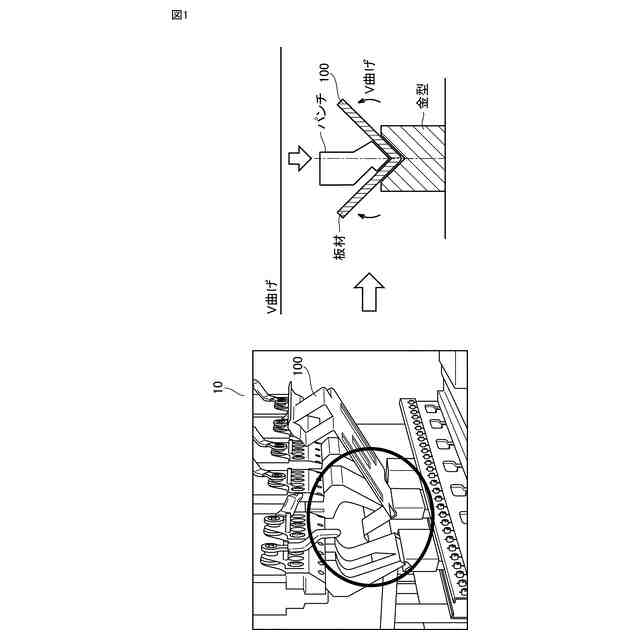
金属の曲げ加工等の柔軟物の加工処理は、複数の加工工程を含むことがある。近年のコンピュータ技術の進展により、ユーザは、シミュレータ等を用いて、このような柔軟物の加工処理のシミュレーションを実行することができる。
【0003】
シミュレーションの実行時にある工程に不具合があった場合、ユーザは、当該不具合のある工程のプログラムを修正した後で、シミュレーションの全行程をやり直す必要があった。そのため、ユーザは、シミュレーション技術を用いたとしても、柔軟物の加工プログラムを完成させるために、多くの時間を費やす必要があった。
【0004】
加工シミュレーションに関し、例えば、特許第7158636号公報(特許文献1)は、「加工を制御する加工プログラムが実行された後の部品に含まれる部位のうち指定された部位である指定部位毎の加工誤差の許容値である加工許容値と設計値とを設定する加工許容値設定部と、機械装置の特性を模擬する機械モデルと加工プログラムとを用いて、加工の加工シミュレーションを実行する加工シミュレーション実行部と、加工シミュレーションによって予測された加工プログラムが実行された後の部品形状であるシミュレーション形状と設計値とに基づいて、シミュレーション形状の加工誤差の予測値である部位加工誤差を、指定部位毎に計算する第1加工結果評価部とを備える」加工評価装置を開示している([要約]参照)。
【先行技術文献】
【特許文献】
【0005】
特許第7158636号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に開示された技術によると、シミュレーションの全行程のうちの一部分を実行することができない。したがって、シミュレーションの全行程のうちの一部分を実行する技術が必要とされている。
【0007】
本開示は、上記のような背景に鑑みてなされたものであって、ある局面における目的は、シミュレーションの全行程のうちの一部分を実行する技術を提供することにある。
【課題を解決するための手段】
【0008】
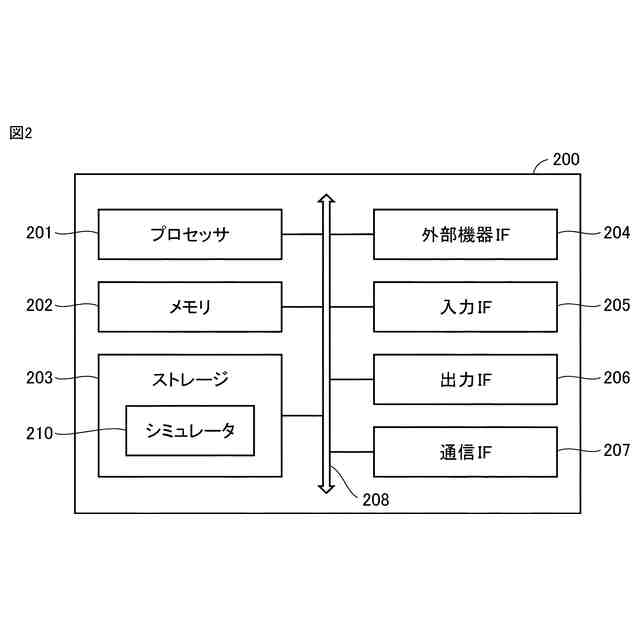
ある実施の形態に従うと、シミュレーションシステムが提供される。シミュレーションシステムは、シミュレータを格納するストレージと、シミュレータを実行するプロセッサとを備える。プロセッサは、複数の工程からなるワークの加工処理のシミュレーションを実行し、シミュレーションの実行中に、シミュレーションの状態情報を保存し、シミュレーションの実行後に、複数の工程のうちの1つの工程を指定する実行コードの入力を受け付けたことに基づいて、状態情報を参照し、指定された1つの工程からワークの加工処理を実行する。この開示によれば、シミュレーションシステムは、シミュレーションの状態を保存することで、シミュレーションの実行後に、指定された1つの工程からシミュレーションを実行し得る。これにより、ユーザは、ワークの加工プログラムをデバッグ中に、不具合のある工程のコードの動作のみを確認することができ、デバッグ時間を削減し得る。
【0009】
上記の開示において、状態情報は、シミュレーション中のワークの形状と、ワークの加工プログラムの変数情報とを含む。変数情報は、工程を識別する情報と、各工程内で実行されるタスクの状態を管理する情報とを含む。この開示によれば、シミュレーションシステムは、3Dオブジェクトであるワークの形状およびワークの加工プログラムの変数の両方を保存することができる。これにより、シミュレーションシステムは、ワークの加工プログラムを途中から実行し、さらに、ワークの加工プログラムの実行段階に合わせたワークの形状を再現し得る。
【0010】
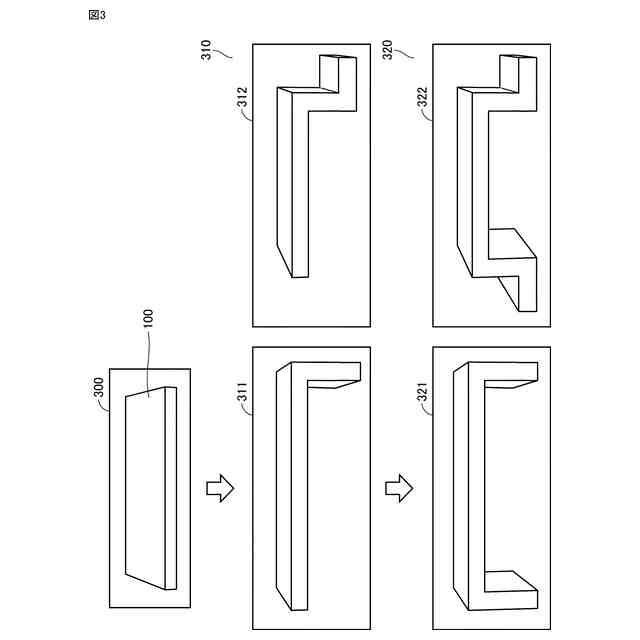
上記の開示において、複数の工程は、第1の工程と、第1の工程の次に実行される第2の工程とを含む。複数の工程のうちの1つの工程を指定する実行コードの入力を受け付けたことに基づいて、指定された1つの工程からワークの加工処理を実行することは、第2の工程を指定する実行コードの入力を受け付けたことに基づいて、第1の工程の完了直後のワークの形状を再現することと、ワークの加工プログラムに、第2の工程で使用される変数情報を渡すことを含む。この開示によれば、シミュレーションシステムは、ワークの加工プログラムを任意の工程から開始すると共に、直前の工程により変形済みのワークの形状を再現し得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
19日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
2か月前
アズビル株式会社
流量制御システム
1か月前
トヨタ自動車株式会社
自動作業装置
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
移動体制御装置
1か月前
マキノジェイ株式会社
工作機械
18日前
岩田工機株式会社
加工装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
村田機械株式会社
搬送車システム
2か月前
株式会社デンソー
過電流検出回路
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
村田機械株式会社
無人搬送車システム
1か月前
オムロン株式会社
サポート装置およびサポート方法
18日前
CKD日機電装株式会社
カスケード形PID制御系の設計法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
ローム株式会社
電圧生成回路
16日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
26日前
株式会社デンソー
ペダル装置
18日前
多摩川精機株式会社
突入電流防止回路
2か月前
オークマ株式会社
工作機械の制御方法及び制御装置
4日前
シャープ株式会社
走行システム及び走行方法
1か月前
ローム株式会社
リニアレギュレータ
1か月前
株式会社ディスコ
加工装置
2か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
丸北研磨株式会社
稼働状況管理システム
2日前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
11日前
アマノ株式会社
自律走行装置およびその妥当性評価方法
24日前
株式会社日立製作所
設備診断装置及び設備診断方法
2か月前
清水建設株式会社
自律移動ロボット
2か月前
シンフォニアテクノロジー株式会社
地図作成方法
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ