TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024080288
公報種別
公開特許公報(A)
公開日
2024-06-13
出願番号
2022193349
出願日
2022-12-02
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
KDDI株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/00 20240101AFI20240606BHJP(制御;調整)
要約
【課題】水中で運用する移動装置をより正確に操作するための情報を提供する。
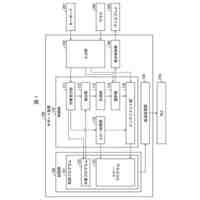
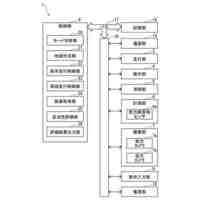
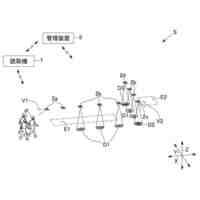
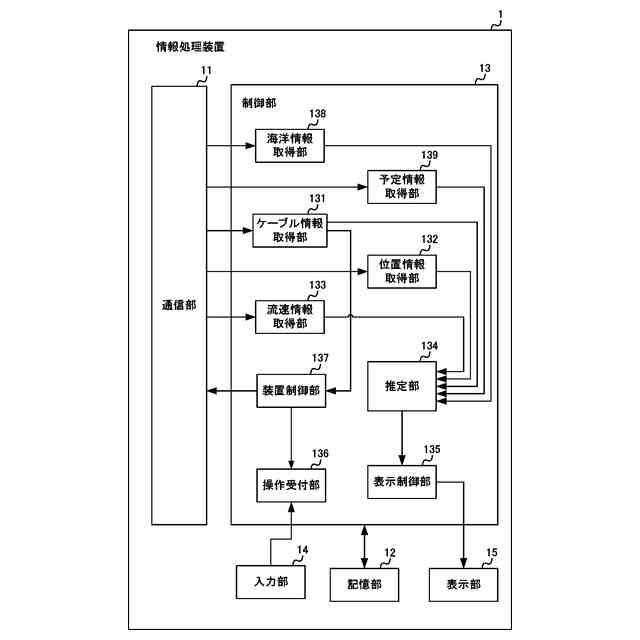
【解決手段】水上を浮動する第1移動装置が排出したケーブルの長さを示す排出ケーブル長を取得するケーブル情報取得部131と、第1移動装置とケーブルを介して接続された、水中を潜航する第2移動装置の位置情報を取得する位置情報取得部132と、第2移動装置が潜航する位置における水流の方向及び速度を示す流速情報を取得する流速情報取得部133と、取得した排出ケーブル長と、位置情報と、流速情報と、に基づいて、第1移動装置が排出したケーブルの状態を推定する推定部134と、を有する情報処理装置1である。
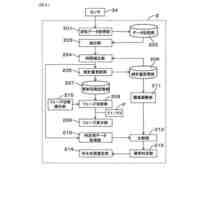
【選択図】図2
特許請求の範囲
【請求項1】
水上を浮動する第1移動装置が排出したケーブルの長さを示す排出ケーブル長を取得するケーブル情報取得部と、
前記第1移動装置と前記ケーブルを介して接続された、水中を潜航する第2移動装置の位置情報を取得する位置情報取得部と、
前記第2移動装置が潜航する位置における水流の方向及び速度を示す流速情報を取得する流速情報取得部と、
取得した前記排出ケーブル長と、前記位置情報と、前記流速情報と、に基づいて、前記第1移動装置が排出した前記ケーブルの状態を推定する推定部と、
を有する情報処理装置。
続きを表示(約 1,600 文字)
【請求項2】
前記推定部が推定した前記ケーブルの状態を表示する画面を表示させる表示制御部をさらに有する、
請求項1に記載の情報処理装置。
【請求項3】
表示制御部をさらに有し、
前記推定部は、前記ケーブルの全長と、前記排出ケーブル長と、推定した前記ケーブルの状態と、に基づいて前記第2移動装置がさらに潜行可能な距離を推定し、
前記表示制御部は、推定した潜行可能な距離を表示させるよう制御する、
請求項1又は2に記載の情報処理装置。
【請求項4】
海中の地形若しくは海中の構造物の位置及び形状の情報を示す地形情報を記憶する記憶部をさらに有し、
前記推定部は、前記地形情報にさらに基づいて前記第2移動装置がさらに潜行可能な距離を推定する、
請求項3に記載の情報処理装置。
【請求項5】
前記表示制御部は、前記排出ケーブル長と、前記位置情報が示す前記第2移動装置と前記第1移動装置との距離と、が所定の関係にある場合、前記ケーブルが流されていることを通知する、
請求項2に記載の情報処理装置。
【請求項6】
前記ケーブルを巻き取る操作を示す巻取操作情報を、前記第1移動装置及び前記第2移動装置を操作するための情報端末から受信する操作受付部をさらに有し、
前記巻取操作情報を受付けると、前記排出ケーブル長と、前記位置情報が示す前記第2移動装置と前記第1移動装置との距離と、が所定の関係になるまで前記ケーブルを巻き取るよう前記第1移動装置を制御する装置制御部をさらに有する、
請求項1又は2に記載の情報処理装置。
【請求項7】
前記ケーブル情報取得部は、前記ケーブルにかかる張力を示す張力情報を、前記第1移動装置からさらに取得し、
前記装置制御部は、前記巻取操作情報を受付けた場合であって、前記張力情報が前記ケーブルにかかる張力が閾値を超えた場合に前記ケーブルの巻き取りを停止させるよう前記第1移動装置を制御する、
請求項6に記載の情報処理装置。
【請求項8】
潮流の方向及び速度を示す海洋情報を取得する海洋情報取得部と、
前記第1移動装置が着水する予定地点の位置を示す予定位置情報と、前記第2移動装置が潜航する予定地点の位置を示す潜行地点情報を受付ける予定情報取得部と、
をさらに有し、
前記推定部は、前記海洋情報と、前記予定位置情報と、前記潜行地点情報と、に基づいて前記ケーブルの状態を推定する、
請求項1又は2に記載の情報処理装置。
【請求項9】
潮流の方向及び速度を示す海洋情報を取得する海洋情報取得部と、
前記第2移動装置が潜航する予定地点と、前記第1移動装置が着水する予定領域と、を取得する取得部と、
表示制御部と、
をさらに有し、
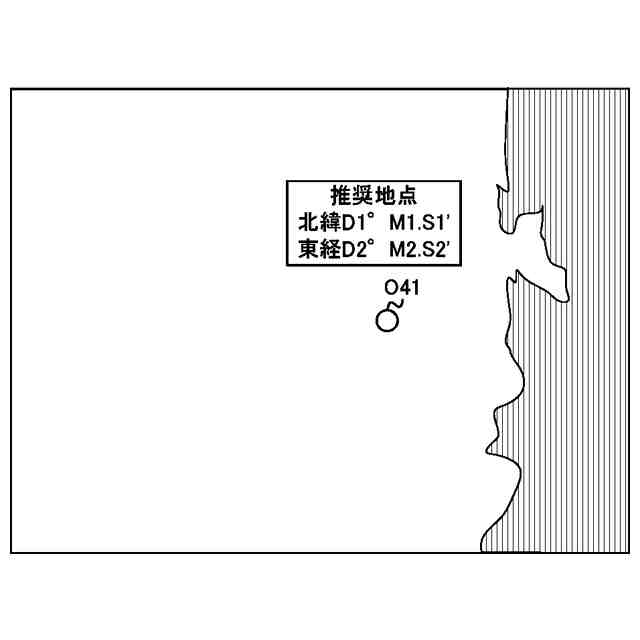
前記推定部は、前記海洋情報と、前記予定地点と、前記予定領域と、に基づいて、前記予定領域の中から着水地点を特定し、
前記表示制御部は、前記推定部が特定した着水地点を表示させるよう制御する、
請求項1又は2に記載の情報処理装置。
【請求項10】
コンピュータが実行する、
水上を浮動する第1移動装置が排出したケーブルの長さを示す排出ケーブル長を取得するステップと、
前記第1移動装置とケーブルを介して接続された、水中を潜航する第2移動装置の位置情報を取得するステップと、
前記第2移動装置が測定した、前記第2移動装置が潜航する位置における水流の方向及び速度を示す流速情報を取得するステップと、
取得した前記排出ケーブル長と、前記位置情報と、前記流速情報と、に基づいて、前記第1移動装置が排出したケーブルの状態を推定するステップと、
を有する情報処理方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
水中ロボットを水上のロボットから接続されるケーブルを介して遠隔から制御するためのシステムが知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-174214号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術においては、水中で動作するドローンなどの移動装置を接続するためのケーブルを海上から繰り出すオペレータを要する。従来技術においては、オペレータが経験と勘に基づいてケーブルの状態を把握し、ケーブルを操作する必要があり、移動装置の操作が不正確になる場合が生じうるという問題が生じていた。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、水中で運用する移動装置をより正確に操作するための情報を推定することを目的とする。
【課題を解決するための手段】
【0006】
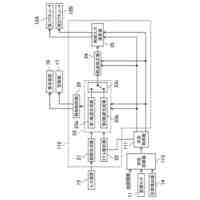
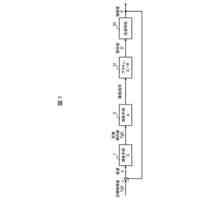
本発明の第1の態様の情報処理装置においては、水上を浮動する第1移動装置が排出したケーブルの長さを示す排出ケーブル長を取得するケーブル情報取得部と、前記第1移動装置と前記ケーブルを介して接続された、水中を潜航する第2移動装置の位置情報を取得する位置情報取得部と、前記第2移動装置が潜航する位置における水流の方向及び速度を示す流速情報を取得する流速情報取得部と、取得した前記排出ケーブル長と、前記位置情報と、前記流速情報と、に基づいて、前記第1移動装置が排出した前記ケーブルの状態を推定する推定部と、を有する。
【0007】
前記推定部が推定した前記ケーブルの状態を表示する画面を表示させる表示制御部をさらに有してもよい。
【0008】
表示制御部をさらに有し、前記推定部は、前記ケーブルの全長と、前記排出ケーブル長と、推定した前記ケーブルの状態と、に基づいて前記第2移動装置がさらに潜行可能な距離を推定し、前記表示制御部は、推定した潜行可能な距離を表示させるよう制御してもよい。
【0009】
海中の地形若しくは海中の構造物の位置及び形状の情報を示す地形情報を記憶する記憶部をさらに有し、前記推定部は、前記地形情報にさらに基づいて前記第2移動装置がさらに潜行可能な距離を推定してもよい。
【0010】
前記表示制御部は、前記排出ケーブル長と、前記位置情報が示す前記第2移動装置と前記第1移動装置との距離と、が所定の関係にある場合、前記ケーブルが流されていることを通知してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
エイブリック株式会社
基準電流源
11日前
株式会社クボタ
作業車
1か月前
株式会社エクセディ
作業ロボット
1か月前
トヨタ自動車株式会社
自動作業装置
29日前
アズビル株式会社
流量制御システム
1か月前
オムロン株式会社
開発装置、開発方法
1か月前
株式会社ダイフク
搬送設備
1か月前
三菱電機株式会社
移動体制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
岩田工機株式会社
加工装置
1か月前
マキノジェイ株式会社
工作機械
10日前
株式会社デンソー
過電流検出回路
1か月前
村田機械株式会社
搬送車システム
1か月前
オムロン株式会社
サポート装置およびサポート方法
10日前
日置電機株式会社
信号出力装置および抵抗測定装置
1か月前
村田機械株式会社
無人搬送車システム
23日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
横河電機株式会社
ロボット管理システム
18日前
日本精工株式会社
制御システムおよび制御方法
1か月前
日本精工株式会社
制御システムおよび制御方法
1か月前
CKD日機電装株式会社
カスケード形PID制御系の設計法
25日前
ローム株式会社
電圧生成回路
8日前
株式会社デンソー
ペダル装置
10日前
シャープ株式会社
走行システム及び走行方法
1か月前
ローム株式会社
リニアレギュレータ
1か月前
富士電機株式会社
予測装置、予測方法及びプログラム
1か月前
オムロン株式会社
回転体ユニットおよびこれを備えた操作装置
3日前
アマノ株式会社
自律走行装置およびその妥当性評価方法
16日前
川崎重工業株式会社
制御システム、制御方法及び制御プログラム
1か月前
株式会社ジェイテクト
異常判定装置
1か月前
シンフォニアテクノロジー株式会社
地図作成方法
1か月前
オークマ株式会社
セルコントローラ
1か月前
株式会社日立製作所
制御装置
29日前
三菱ロジスネクスト株式会社
誘導システム
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ