TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024070418
公報種別
公開特許公報(A)
公開日
2024-05-23
出願番号
2022180895
出願日
2022-11-11
発明の名称
自動運転総合制御装置
出願人
三菱電機株式会社
代理人
弁理士法人ぱるも特許事務所
主分類
B60W
50/035 20120101AFI20240516BHJP(車両一般)
要約
【課題】交差点内に侵入した自動運転車両に異常が発生した場合に、車両の異常状態に応じた交差点脱出経路を生成し、衝突回避レベルの高い経路を選定し、車両を走行させる、自動運転総合制御装置を提供する。
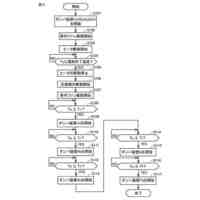
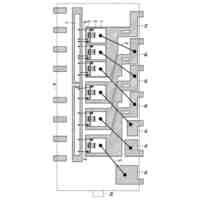
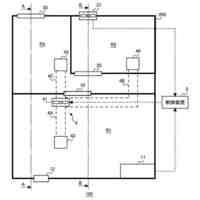
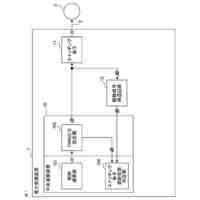
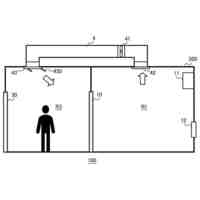
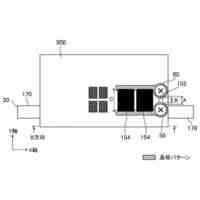
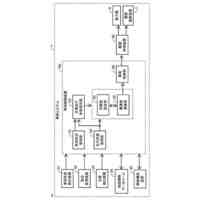
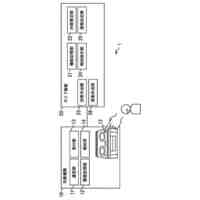
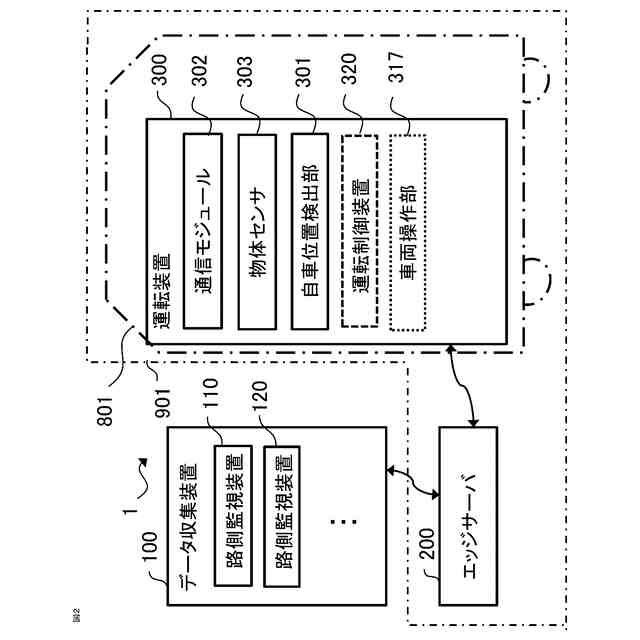
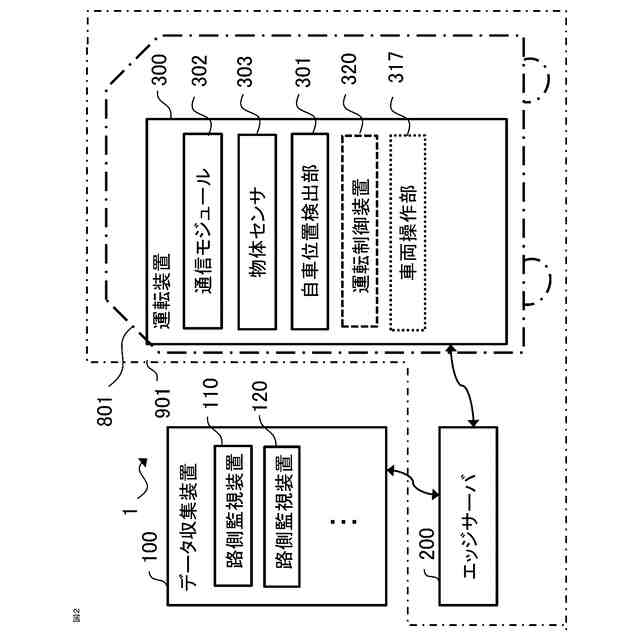
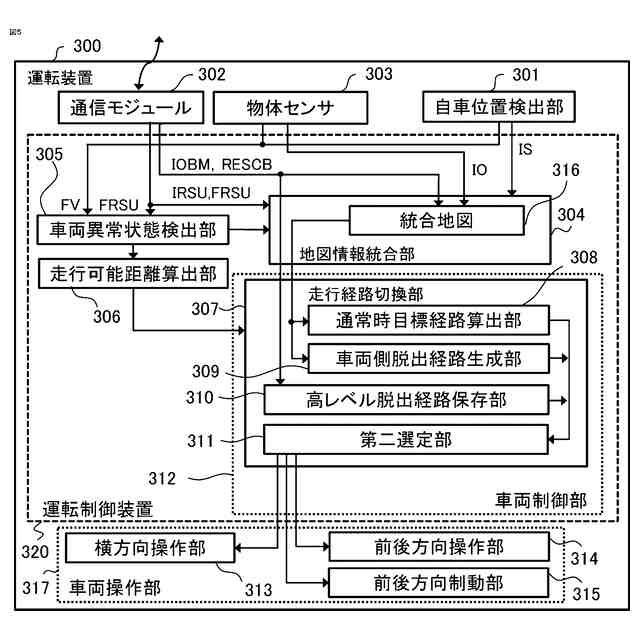
【解決手段】自動運転総合制御装置1は、センサおよび、検出した物体の情報を送信する送信器を有する複数の路側監視装置110と、受信部、車両異常状態検出部、交差点を脱出するための交差点脱出経路を路側監視装置ごとに生成する脱出経路生成部、生成された交差点脱出経路を衝突回避レベルによって比較し選定する選定部、異常時走行可能距離を算出する走行可能距離算出部、車両の異常状態が検出された場合は、異常時走行可能距離に対応した高レベル交差点脱出経路に沿って車両を走行させる車両制御部を有する運転制御装置320、および車両操作部317を有する自律運転装置300とを備えたものである。
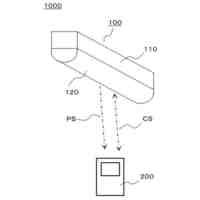
【選択図】図2
特許請求の範囲
【請求項1】
周囲の物体を検出するセンサ、および、
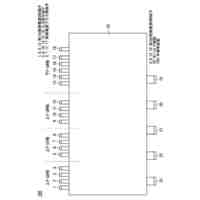
前記センサの視野角情報と前記センサによって検出した前記物体の情報を送信する送信器、を有する複数の路側監視装置と、
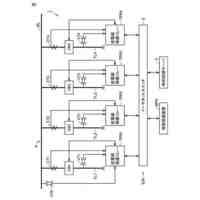
前記路側監視装置の前記送信器から前記視野角情報と前記物体の情報を受信する受信部、
車両の異常状態を検出する車両異常状態検出部、
交差点に進入した前記車両に異常が発生した場合に前記交差点を脱出するための交差点脱出経路を、前記路側監視装置から受信した情報に基づいて前記路側監視装置ごと、かつ複数の異常時走行可能距離ごとに生成する脱出経路生成部、
前記脱出経路生成部によって生成された前記交差点脱出経路を、前記交差点脱出経路を前記車両が走行中に前記物体との衝突を回避できる衝突回避レベルによって比較し、最も衝突回避レベルの高い前記交差点脱出経路を高レベル交差点脱出経路として前記異常時走行可能距離ごとに選定する選定部、
前記車両異常状態検出部によって前記車両の異常状態が検出された場合は、異常状態に応じた前記異常時走行可能距離を算出する走行可能距離算出部、
前記車両異常状態検出部によって前記交差点に進入した前記車両の異常状態が検出された場合は、前記選定部によって選定された高レベル交差点脱出経路のうちで前記走行可能距離算出部によって算出された前記異常時走行可能距離に対応した前記高レベル交差点脱出経路に沿って前記車両を走行させる指令信号を出力する車両制御部、および、
前記車両制御部によって出力された指令信号によってアクチュエータを駆動する車両操作部、を有する自律運転装置と、を備えた自動運転総合制御装置。
続きを表示(約 2,400 文字)
【請求項2】
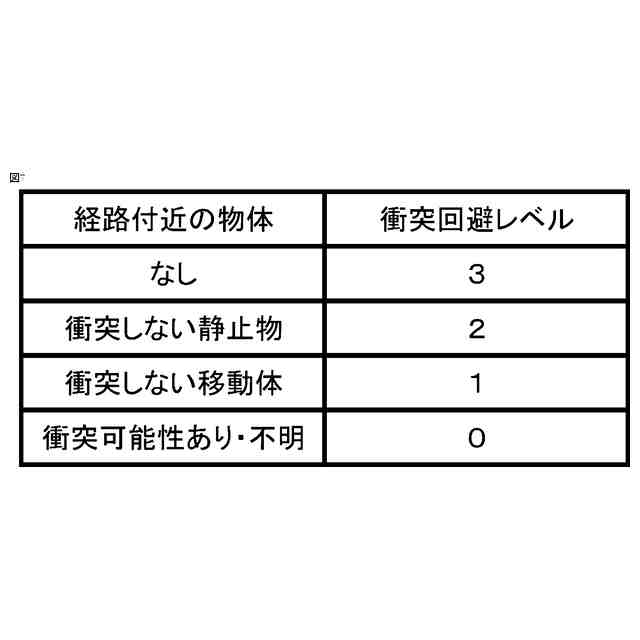
前記自律運転装置の前記選定部は、前記交差点脱出経路上に物体を検出しない場合を3、前記交差点脱出経路上に静止物体はあるが衝突しない場合を2、前記交差点脱出経路上に移動物体はあるが衝突しない場合を1、前記交差点脱出経路上に物体があって衝突する場合または衝突可能性が不明の場合は0に前記衝突回避レベルを定める、請求項1に記載の自動運転総合制御装置。
【請求項3】
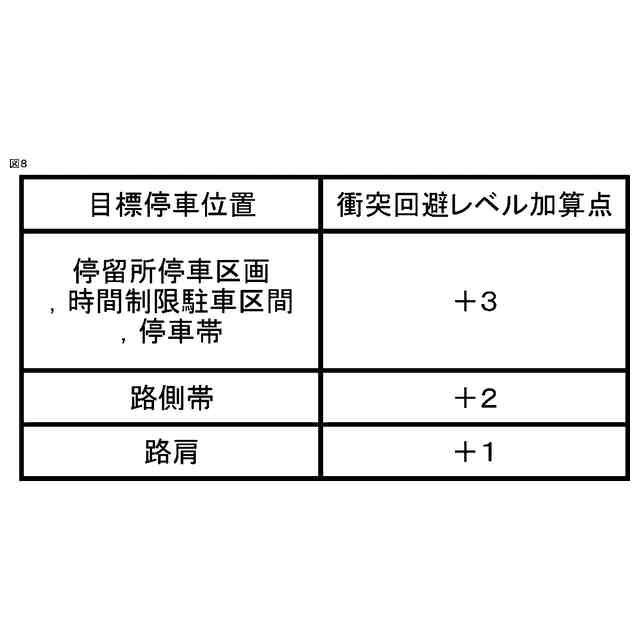
前記自律運転装置の前記選定部は、前記交差点脱出経路の終点である停車地点が停留所停車区画、停車帯、または時間制限駐車区間である場合は+3、前記交差点脱出経路の前記停車地点が路側帯である場合は+2、前記交差点脱出経路の前記停車地点が路肩である場合は+1の加算を前記衝突回避レベルに行う、請求項2に記載の自動運転総合制御装置。
【請求項4】
前記自律運転装置は、前記車両に搭載されて周囲の物体を検出する複数の車載センサを有し、
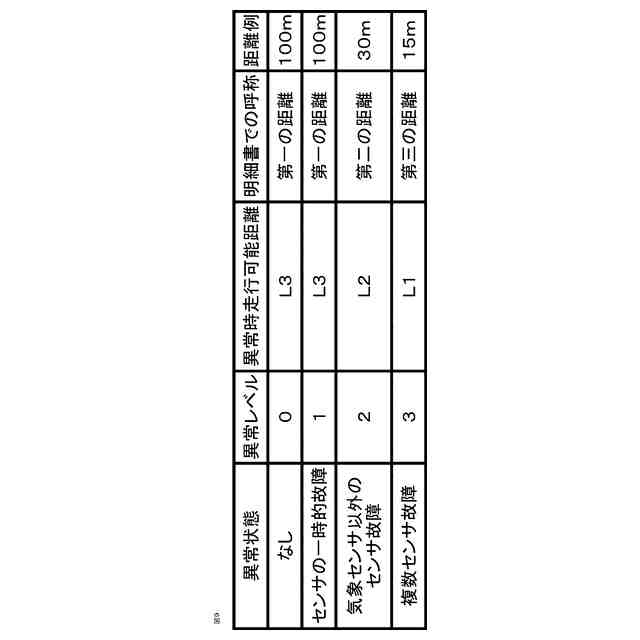
前記自律運転装置の前記走行可能距離算出部は前記異常時走行可能距離として、前記車載センサの一つが一時的故障を発生した場合に予め定めた第一の距離を設定し、前記車載センサの一つが継続して故障を発生した場合に前記第一の距離よりも短い予め定めた第二の距離を設定し、複数の前記車載センサが継続して故障を発生した場合に前記第二の距離よりも短い予め定めた第三の距離を設定する、請求項1に記載の自動運転総合制御装置。
【請求項5】
前記自律運転装置は、前記車両に搭載されて周囲の物体を検出する複数の車載センサと、前記車両に搭載されて周囲の気象状態を検出する気象センサを有し、
前記自律運転装置の前記走行可能距離算出部は前記異常時走行可能距離として、前記車載センサの一つが一時的故障を発生した場合に予め定めた第一の距離を設定し、前記気象センサが故障を発生した場合に前記第一の距離よりも短い予め定めた第四の距離を設定し、前記車載センサの一つが継続して故障を発生した場合に前記第四の距離よりも短い予め定めた第二の距離を設定し、複数の前記車載センサが継続して故障を発生した場合に前記第二の距離よりも短い予め定めた第三の距離を設定し、前記車両の駆動装置または制動装置が故障を発生した場合は前記第三の距離よりも短い予め定めた第五の距離を設定する、請求項1に記載の自動運転総合制御装置。
【請求項6】
前記自律運転装置の前記走行可能距離算出部は前記異常時走行可能距離として、前記第五の距離を0に設定する、請求項5に記載の自動運転総合制御装置。
【請求項7】
前記自律運転装置は、前記車両に搭載されて周囲の物体を検出する複数の車載センサを有し、
前記自律運転装置の前記車両制御部は、
交差点に進入した前記車両に異常が発生した場合に前記交差点を脱出し停車するための交差点脱出経路を、前記路側監視装置から受信した情報と前記車載センサによって検出した情報に基づいて、予め定めた車両側脱出経路生成距離に対して生成し、車両側交差点脱出経路とする車両側脱出経路生成部、
前記車両異常状態検出部によって前記交差点に進入した前記車両の異常状態が検出された場合は、前記走行可能距離算出部によって算出された前記異常時走行可能距離が前記車両側脱出経路生成距離よりも長い場合は、前記異常時走行可能距離に対応した前記高レベル交差点脱出経路を選定し、前記走行可能距離算出部によって算出された前記異常時走行可能距離が前記車両側脱出経路生成距離以下の場合は、前記車両側脱出経路生成部によって生成された前記車両側交差点脱出経路を選定する第二選定部、を有し、
前記車両制御部は、前記第二選定部によって選定された前記高レベル交差点脱出経路または前記車両側交差点脱出経路に沿って前記車両を走行させる指令信号を出力する請求項1に記載の自動運転総合制御装置。
【請求項8】
前記自律運転装置の前記車両制御部は、
交差点に進入した前記車両に異常が発生した場合に前記交差点を脱出し停車するための交差点脱出経路を、前記路側監視装置から受信した情報と前記車載センサによって検出した情報に基づいて、前記第三の距離に対して生成し、車両側交差点脱出経路とする車両側脱出経路生成部、
前記車両異常状態検出部によって前記交差点に進入した前記車両の異常状態が検出された場合は、前記走行可能距離算出部によって算出された前記異常時走行可能距離が前記第一の距離または前記第二の距離の場合は、前記異常時走行可能距離に対応した前記高レベル交差点脱出経路を選定し、前記走行可能距離算出部によって算出された前記異常時走行可能距離が前記第三の距離の場合は、前記車両側脱出経路生成部によって生成された前記車両側交差点脱出経路を選定する第二選定部、を有し、
前記車両制御部は、前記第二選定部によって選定された前記高レベル交差点脱出経路または前記車両側交差点脱出経路に沿って前記車両を走行させる指令信号を出力する請求項4に記載の自動運転総合制御装置。
【請求項9】
前記自律運転装置の前記車載センサは、GNSS、ジャイロセンサ、または、タイヤ空気圧センサの少なくとも一つを含む、請求項4に記載の自動運転総合制御装置。
【請求項10】
前記自律運転装置の前記車両異常状態検出部は、検出する前記車両の異常状態として通信の遅延量を含み、
前記自律運転装置の前記走行可能距離算出部は、前記通信の遅延量に応じて前記異常時走行可能距離を算出する請求項1に記載の自動運転総合制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、自動運転総合制御装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、輸送車両の自動運転化が望まれている。自動運転の導入によって、物流分野におけるドライバ不足の改善、交通渋滞の改善、ラストワンマイル問題への対応、といった様々な社会問題の解決が期待されている。
【0003】
工場等の特定エリア内で運行する車両においても、従来ではドライバがトラックまたは牽引台車を用いて輸送を行ってきた。しかし、工場の稼働率向上のためには、工場内搬送を常時稼働させることが望ましい。牽引できる車両台数の増加、搬送時間帯の拡大といった方法では、設備コスト、ドライバの確保にコスト増加が必要となり事業者にとって負担が大きい。このために、特定エリア内で運行する輸送車両においても自動運転化が望まれている。
【0004】
SAE(米国自動車技術会:Society of Automotive Engineers)は、公道を通行する一般車両における自動運転の技術レベルを定義している。多くの製造業者、社会団体がこの技術レベルを採用している。自動運転レベル4では、運転者による車両の常時監視を必要とせず、車両の自動走行を継続する条件が定められている。
【0005】
国土交通省が定める自動運転車両の安全技術ガイドラインには、レベル4の自動運転についてMRM(Minimum Risk Maneuver)機能を義務付けている。MRMは、運行設計領域の範囲外となった場合、自動運転車両に障害が発生した場合等、自動運転の継続が困難であると自動運転装置が判断した場合において、車両を自動で安全に停止させる機能である。
【0006】
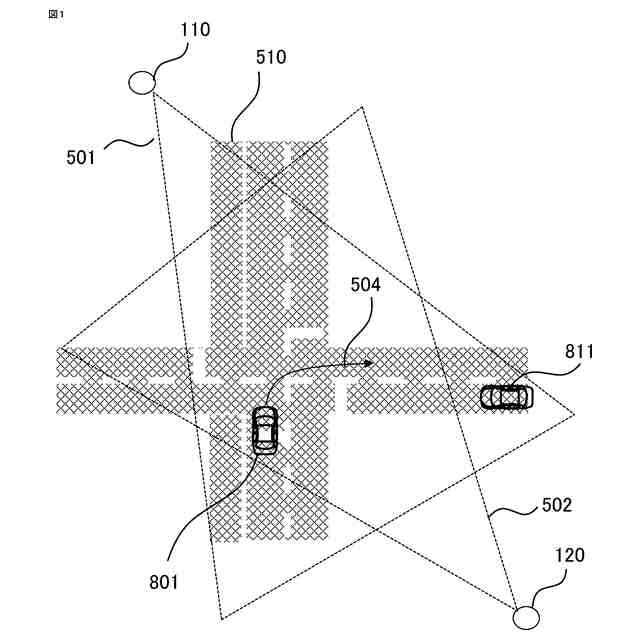
交差点に進入した自動運転車両に異常が発生した場合は、通常の道路を走行中に比べてより多くのリスクが想定できる。交差点の中で車両が停車した場合、交通の妨げとなり、衝突の可能性も考えられるからである。よって、交差点に進入した自動運転車両に異常が発生した場合は、交差点を脱出することを優先させることが望ましい。そして、交差点を脱出する経路は、衝突回避レベルによって複数の脱出経路を比較し衝突回避レベルの高い脱出経路を選定することが望ましい。
【0007】
交差点での自動運転車両の走行において、車両の自律運転装置と路側監視装置が情報を共有化し、障害物との衝突、接近などのリスクの高い状態が想定される場合に、車両の自動運転経路を車両の外部からオーバーライド制御(強制操作)し適切な走行経路を走行させる技術が開示されている。(例えば特許文献1)
【先行技術文献】
【特許文献】
【0008】
特開2022-174519号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
特許文献1に開示されている技術では、車両に設けた認識装置と外部の監視システムに設けた監視装置によって、道路周辺の情報を取得する。認識装置と監視装置は、周辺の状況を撮影するカメラ、周辺の障害物を検出するレーダなどが想定されている。これら二つの装置によって走行路周辺の障害物を検出する。そして、車両が障害物と衝突または接近しないかどうか自動走行経路を検証する。車両の異常を検出する異常検出部によって車両の異常を検出した際に、走行路周辺の障害物と接触しないように自動運転経路を車両の外部から指定し、加速または減速指示を行う。
【0010】
しかしながら、特許文献1には交差点に進入した自動運転車両に異常が生じた場合に、車両の交差点からの脱出を優先する処理について記載されていない。そして、衝突回避レベルによって複数の脱出経路を比較し選定することにも触れられていない。特許文献1に記載された技術では、交差点内で車両に異常が生じた場合に、車両が外部からオーバーライド制御(強制操作)されて交差点内で減速、停車してしまう事態も考えられる。交差点内において、車両が停車することは他の車両の通行を妨げ、他の車両と衝突するリスクを高めてしまうこととなる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
冷蔵庫
11日前
三菱電機株式会社
冷蔵庫
11日前
三菱電機株式会社
冷蔵庫
7日前
三菱電機株式会社
照明装置
14日前
三菱電機株式会社
照明器具
20日前
三菱電機株式会社
照明装置
7日前
三菱電機株式会社
半導体装置
12日前
三菱電機株式会社
半導体装置
21日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
空調システム
19日前
三菱電機株式会社
電力変換装置
10日前
三菱電機株式会社
空調システム
18日前
三菱電機株式会社
空調システム
18日前
三菱電機株式会社
電力変換装置
18日前
三菱電機株式会社
車両制御装置
6日前
三菱電機株式会社
電力変換装置
4日前
三菱電機株式会社
空調システム
19日前
三菱電機株式会社
最適演算装置
4日前
三菱電機株式会社
半導体製造装置
21日前
三菱電機株式会社
堆肥の製造方法
4日前
三菱電機株式会社
回転電機ユニット
今日
三菱電機株式会社
情報処理システム
14日前
三菱電機株式会社
水素製造システム
20日前
三菱電機株式会社
遠隔操作システム
19日前
三菱電機株式会社
風呂給湯システム
12日前
三菱電機株式会社
給湯機管理システム
6日前
三菱電機株式会社
操作ガイドシステム
14日前
三菱電機株式会社
調整装置、調整方法
11日前
三菱電機株式会社
給湯機管理システム
19日前
三菱電機株式会社
回路基板および電子機器
21日前
三菱電機株式会社
半導体装置および回路基板
4日前
三菱電機株式会社
照明装置および照明システム
17日前
三菱電機株式会社
保護システムおよび保護方法
18日前
三菱電機株式会社
室外機及び故障診断システム
18日前
三菱電機株式会社
訓練システム及び電波放射機器
14日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ