TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024067726
公報種別
公開特許公報(A)
公開日
2024-05-17
出願番号
2022178027
出願日
2022-11-07
発明の名称
車両用制御装置
出願人
ダイハツ工業株式会社
代理人
個人
,
個人
主分類
G01P
21/00 20060101AFI20240510BHJP(測定;試験)
要約
【課題】軸方向の加速度を検出する加速度センサの車両への取り付け誤差の補正を、安価な構成により精度よく行うことができるようにする。
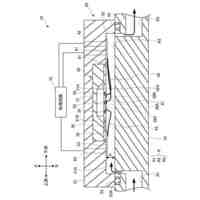
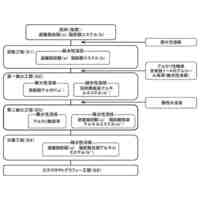
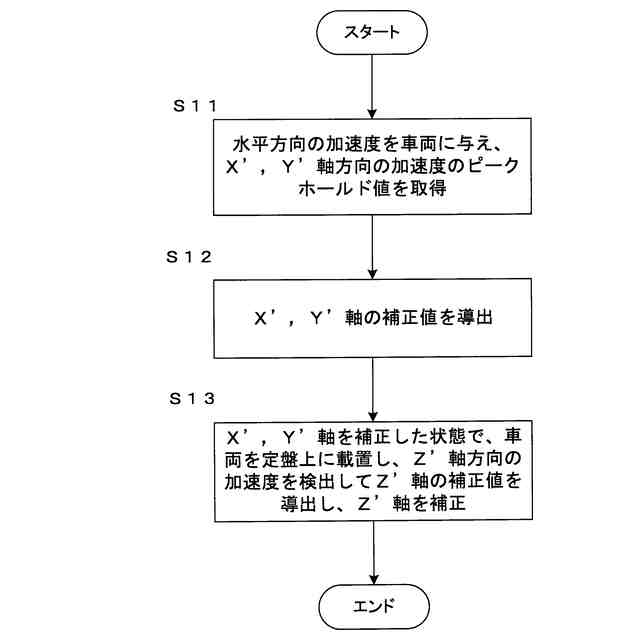
【解決手段】補正モード時に、車両を傾きが水平に管理された定盤上に載置した状態で、加速度センサによる上下方向(Z’軸方向)の加速度検出値に基づき、車両上下方向(Z軸方向)に対する取り付け誤差の補正値を導出し(ステップS1)、導出した取り付け誤差の補正値に基づき、加速度センサのZ’軸をZ軸に一致させた状態で、車両に対して水平方向の加速度を与え、加速度センサによる前後方向(X’軸方向)及び左右方向(Y’軸方向)の加速度検出値に基づき、車両前後方向(X軸方向)及び車両左右方向(Y軸方向)に対する加速度センサの取り付け誤差の補正値を導出し(ステップS2)、導出した取り付け誤差補正値に基づいて加速度センサのX’軸、Y’軸をX軸、Y軸に一致するように補正する。
【選択図】図5
特許請求の範囲
【請求項1】
車両に搭載され、前後方向、左右方向及び上下方向の3軸方向の加速度を検出する加速度センサの前記3軸方向の車両前後方向、車両左右方向、車両上下方向それぞれに対する取り付け誤差を補正して前記車両の制御を行う車両用制御装置であって、
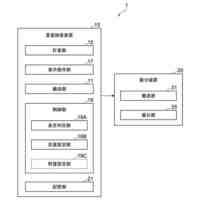
前記加速度センサによる前記3軸方向それぞれの加速度検出値を取得する取得部と、
前記補正モード時に、前記取得部により取得された前記加速度センサによる前記3軸方向の少なくとも2軸の加速度検出値に基づき、前記3軸方向の前記加速度センサの取り付け誤差を補正する補正値を導出する補正部とを備え、
前記取得部は、
前記車両を傾きが管理された定盤上に載置した状態で、前記加速度センサによる前記上下方向の加速度検出値を取得し、
前記車両に対し水平方向への加速度を与えたときの前記加速度センサの前記前後方向及び前記左右方向の少なくともいずれかの加速度検出値を取得し、
前記補正部は、
前記取得部により取得される前記加速度センサによる前記上下方向の加速度検出値に基づき、前記上下方向の車両上下方向に対する取り付け誤差の補正値を導出し、
前記取得部により取得される前記加速度センサによる前記前後方向及び前記左右方向の少なくともいずれかの加速度検出値に基づき、前記前後方向、前記左右方向の車両前後方向、車両左右方向それぞれに対する前記加速度センサの取り付け誤差の補正値を導出する
ことを特徴とする車両用制御装置。
続きを表示(約 210 文字)
【請求項2】
前記補正部は、
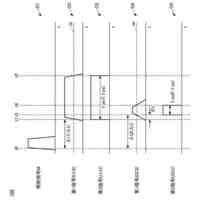
前記取得部により取得される前記加速度センサによる前記前後方向及び前左右方向の加速度検出値であって、前記車両に対して水平方向への加速度が与えられる間のピーク値を保持し、保持した前記前後方向及び前記左右方向の加速度検出値のピーク値の比率から前記前後方向及び前記左右方向の前記加速度センサの取り付け誤差の補正値を導出する
ことを特徴とする請求項1に記載の車両用制御装置。
発明の詳細な説明
【技術分野】
【0001】
この発明は、車両に搭載された加速度センサの3軸方向の検出軸の車両前後方向、車両左右方向、車両上下方向それぞれに対する取り付け誤差を補正して車両の制御を行う車両用制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
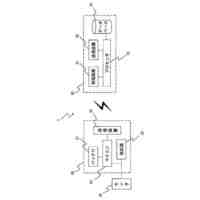
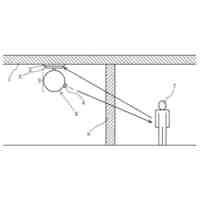
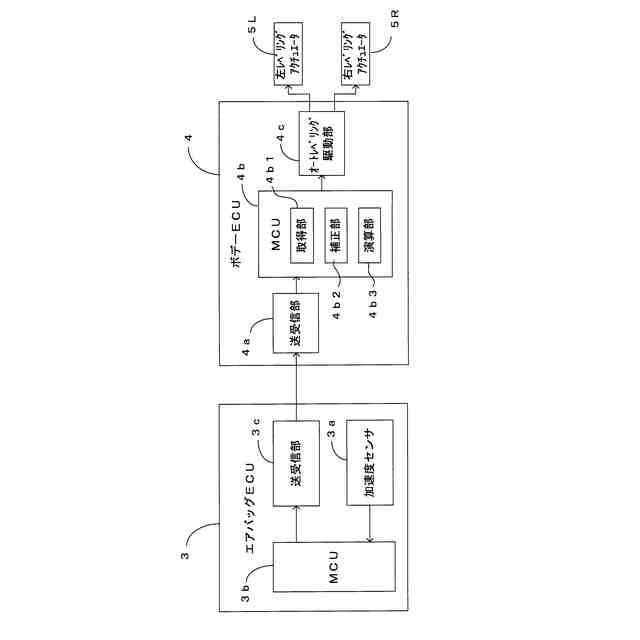
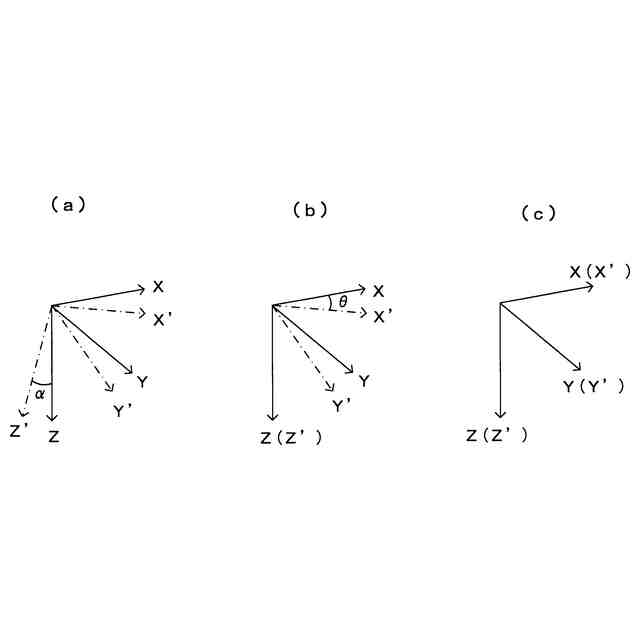
従来、加速度センサの検出データに基づき車両の制御を行う装置として、ヘッドランプの光軸の傾き角度を制御するいわゆるオートレベリング制御装置や、車両の横滑り防止装置などの車両用制御装置がある。この種の装置では、車両前後方向(X軸方向)、車両左右方向(Y軸方向)及び車両上下方向(Z軸方向)の3軸方向の車両傾斜角度(車両姿勢角度)或いは加速度を検出可能な検出手段を車両に搭載し、この検出手段により検出される各軸方向の車両傾斜角度或いは加速度に基づき車両の姿勢角を検出することで、車両の制御が行われる。
【0003】
ところで、3軸方向の車両傾斜角度或いは加速度を検出する検出手段を車両に組み付ける場合に、検出手段のX,Y,Zの各検出軸それぞれが車両の前後、左右、上下の各方向に一致していれば問題はないが、作業者が検出手段の組み付け作業を行うことから検出手段の組み付け誤差が生じるため、従来、特許文献1に記載のように、組み付け誤差を補正することが行われている。
【0004】
この特許文献1では、検出手段は3軸方向の車両傾斜角度(車両傾斜角度)を検出する傾斜検出装置であり、このような傾斜検出装置を車両に設け、オートレベリング制御専用のECUElectronic Control Unit)により、車両が第1状態にあるときの傾斜検出装置の検出値、及び車両の傾斜角度が第1状態と異なる第2状態に車両があるときの傾斜検出装置の検出値から得られる補正情報を得て、補正後の傾斜検出装置の検出値に基づき、ヘッドランプの光軸の傾き角度の制御を行うようになっている。ここで、具体的に第1状態とは、車両が水平面におかれた状態であり、第2状態とは、第1状態にある車両の前部または後部に荷重をかけた状態である。
【先行技術文献】
【特許文献】
【0005】
特開2015-127203号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、上記した特許文献1に記載の補正手法は、補正時に車両に荷重をかける工程が必要になって補正作業の効率化の妨げになるとともに、荷重をかけることによって、傾斜検出装置の検出値が車両のサスペンションのばらつきやタイヤの空気圧のばらつきの影響を受け、その結果、車両ごとに傾斜検出装置の車両傾斜角度(車両傾斜角度)の検出値にばらつきが生じ、補正精度に悪影響を及ぼすおそれがある。
【0007】
本発明は、3軸方向の加速度を検出する加速度センサの車両への取り付け誤差の補正を、安価な構成により精度よく行うことができるようにすることを目的とする。
【課題を解決するための手段】
【0008】
上記した目的を達成するために、本発明の車両用制御装置は、両に搭載され、前後方向、左右方向及び上下方向の3軸方向の加速度を検出する加速度センサの前記3軸方向の車両前後方向、車両左右方向、車両上下方向それぞれに対する取り付け誤差を補正して前記車両の制御を行う車両用制御装置であって、前記加速度センサによる前記3軸方向それぞれの加速度検出値を取得する取得部と、前記補正モード時に、前記取得部により取得された前記加速度センサによる前記3軸方向の少なくとも2軸の加速度検出値に基づき、前記3軸方向の前記加速度センサの取り付け誤差を補正する補正値を導出する補正部とを備え、前記取得部は、前記車両を傾きが管理された定盤上に載置した状態で、前記加速度センサによる前記上下方向の加速度検出値を取得し、前記車両に対し水平方向への加速度を与えたときの前記加速度センサの前記前後方向及び前記左右方向の少なくともいずれかの加速度検出値を取得し、前記補正部は、前記取得部により取得される前記加速度センサによる前記上下方向の加速度検出値に基づき、前記上下方向の車両上下方向に対する取り付け誤差の補正値を導出し、前記取得部により取得される前記加速度センサによる前記前後方向及び前記左右方向の少なくともいずれかの加速度検出値に基づき、前記前後方向、前記左右方向の車両前後方向、車両左右方向それぞれに対する前記加速度センサの取り付け誤差の補正値を導出することを特徴としている。
【0009】
このような構成によれば、取得部により、車両を傾きが例えば水平などに管理された定盤上に載置した状態で、加速度センサによる上下方向の加速度検出値を取得し、車両に対し水平方向への加速度を与えたときの加速度センサの前後方向及び左右方向の少なくともいずれかの加速度検出値を取得し、補正部により、取得部により取得される加速度センサによる上下方向の加速度検出値に基づき、加速度センサの上下方向の車両上下方向に対する取り付け誤差の補正値を導出し、加速度センサの前後方向及び左右方向の少なくともいずれかの加速度検出値に基づき、加速度センサの前後方向、左右方向の車両前後方向、車両左右方向それぞれに対する加速度センサの取り付け誤差の補正値を導出する。
【0010】
そのため、車両傾斜角度(車両姿勢角度)の検出値ではなく、上下、前後、左右の3軸方向に検出軸を有する加速度センサの加速度検出値に基づく補正であることから、従来のように補正時に車両に荷重をかけることによるサスペンションやタイヤ空気圧等のばらつきに起因した車両傾斜角度(車両姿勢角度)の検出値のばらつきをなくすことができ、精度よく加速度センサの取り付け誤差を補正することができる。このとき、車両に既に搭載されている加速度センサを利用することができ、搭載済みの加速度センサを利用して車両制御を行う既存の制御装置の制御ソフトウェアを変更するだけで加速度センサの取り付け誤差の補正が可能になり、加速度センサの取り付け誤差の補正を行う専用の制御装置を必要とせずに加速度センサの取り付け誤差を補正できることから、コストの増加を抑制することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
検査装置
23日前
キヤノン株式会社
枠部材
2日前
株式会社SUBARU
車両
1日前
テクノス株式会社
反射装置
18日前
個人
回転動作検出システム
25日前
エイブリック株式会社
温度センサ
19日前
大和製衡株式会社
組合せ秤
19日前
大和製衡株式会社
組合せ秤
23日前
日本電波工業株式会社
感知センサ
1日前
個人
交差点形状表現アルゴリズム
15日前
エイブリック株式会社
半導体装置。
19日前
住江織物株式会社
排尿検知システム
3日前
株式会社D.O.N
人感装置
19日前
個人
多元作用力検出機能性締結金具
8日前
日本無線株式会社
レーダ装置
8日前
アズビル株式会社
流量センサ
24日前
株式会社ヨコオ
接続装置
24日前
月島食品工業株式会社
分析方法
18日前
株式会社テイエルブイ
流量推定システム
25日前
日本電気株式会社
LiDAR装置
23日前
株式会社ジークエスト
感温センサー
23日前
フォロフライ株式会社
情報処理装置
23日前
ローム株式会社
磁気検出装置
23日前
三菱マテリアル株式会社
温度センサ
26日前
ミツミ電機株式会社
測距装置
17日前
トヨタ自動車株式会社
温度計測装置
26日前
株式会社大林組
風速再現装置
19日前
ローム株式会社
磁気検出装置
17日前
中国電力株式会社
不良碍子検出装置
18日前
富士電機株式会社
エンコーダ
23日前
ミツミ電機株式会社
測距装置
24日前
ヤマハ株式会社
歪センサ装置
19日前
株式会社昭和測器
ロードセル
17日前
株式会社 キョーワ
食品秤量搬送装置
2日前
サンコール株式会社
電流検出器
18日前
株式会社イシダ
計量装置
23日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ