TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058581
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2023134288
出願日
2023-08-21
発明の名称
撮像システム、撮像装置および撮像方法
出願人
株式会社リコー
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
7/4914 20200101AFI20240418BHJP(測定;試験)
要約
【課題】距離の算出精度の低下を抑制するための複数の位相画像に対する処理を実現することができる撮像システム、撮像装置および撮像方法を提供する。
【解決手段】入力された複数の位相画像に対し、同じ位相の複数の位相画像同士の加算処理を行って加算位相画像を生成する加算部を有し、入力された複数の位相画像は、第1の条件で撮像された複数の第1の位相画像と、第1の条件と異なる第2の条件で撮像された1以上の第2の位相画像と、を含み、第1の位相画像の数は、第2の位相画像の数よりも多く、加算部は、少なくとも複数の第1の位相画像について、同じ位相の複数の第1の位相画像間の動き量を導出し、動き量に基づいて、同じ位相の複数の第1の位相画像に対して補正を行い、加算処理により複数の位相毎に加算位相画像を生成する。
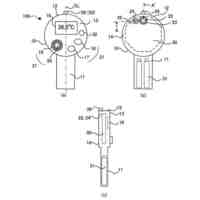
【選択図】図1
特許請求の範囲
【請求項1】
入力された複数の位相画像に対し、同じ位相の複数の前記位相画像同士の加算処理を行って加算位相画像を生成する加算部を有し、
前記入力された複数の位相画像は、第1の条件で撮像された複数の第1の位相画像と、前記第1の条件と異なる第2の条件で撮像された1以上の第2の位相画像と、を含み、
前記第1の位相画像の数は、前記第2の位相画像の数よりも多く、
前記加算部は、少なくとも前記複数の第1の位相画像について、同じ位相の複数の前記第1の位相画像間の動き量を導出し、前記動き量に基づいて、該同じ位相の複数の第1の位相画像に対して補正を行い、前記加算処理により複数の位相毎に前記加算位相画像を生成する撮像システム。
続きを表示(約 1,700 文字)
【請求項2】
前記複数の第1の位相画像は、第1の期間に撮像され、
前記1以上の第2の位相画像は、前記第1の期間とは異なる第2の期間で撮像され、
前記加算部は、前記第1の期間に撮像された前記複数の第1の位相画像のうち、該第1の期間の中央よりも前記第2の期間に近い期間に撮像された前記第1の位相画像を第1の基準位相画像として選択し、前記第1の基準位相画像を用いて前記動き量を導出する請求項1に記載の撮像システム。
【請求項3】
前記第1の期間は、時間的に離間した複数の期間を含む請求項2に記載の撮像システム。
【請求項4】
前記入力された複数の位相画像は、前記第1の期間および前記第2の期間と異なる第3の期間に、前記第1の条件および前記第2の条件と異なる第3の条件で撮像された複数の第3の位相画像と、をさらに含み、
前記第2の期間は、前記第1の期間と前記第3の期間との間であり、
前記加算部は、前記第3の期間に撮像された前記複数の第3の位相画像のうち、前記第3の期間の中央よりも前記第2の期間に近い期間に撮像された前記第3の位相画像を第2の基準位相画像として選択し、前記第2の基準位相画像を用いて前記動き量を導出する請求項2に記載の撮像システム。
【請求項5】
照射光を照射する光源と、前記照射光が対象物で反射した反射光を受光し受光信号を出力する受光センサと、を備える撮像部と、
前記複数の位相で前記複数の位相画像を撮像するように前記撮像部を制御する撮像制御部と、
をさらに有する請求項1~4のいずれか一項に記載の撮像システム。
【請求項6】
外部からの入力を受け付ける入力部を、さらに備え、
前記加算部は、前記入力部による入力に基づいて前記複数の第1の位相画像から選択された基準位相画像を用いて、前記動き量を導出する請求項1~4のいずれか一項に記載の撮像システム。
【請求項7】
前記複数の位相毎の前記加算位相画像に基づいて、対象物までの距離を算出する距離計測部を、さらに備えた請求項1~4のいずれか一項に記載の撮像システム。
【請求項8】
前記距離計測部は、前記複数の位相毎の前記加算位相画像に基づいて、前記対象物までの距離を示す距離画像を生成し、
前記距離画像を表示装置に表示させる表示制御部を、さらに備えた請求項7に記載の撮像システム。
【請求項9】
前記加算部は、前記補正をせずに前記加算処理により前記加算位相画像をさらに生成し、
前記距離計測部は、前記補正をせずに前記加算処理により生成された前記加算位相画像に基づいて第1の距離画像を生成し、前記補正後における前記加算処理により生成された前記加算位相画像に基づいて第2の距離画像を生成し、
前記表示制御部は、前記第1の距離画像および前記第2の距離画像を前記表示装置に表示させる請求項8に記載の撮像システム。
【請求項10】
光源から照射された照射光が対象物で反射した反射光を受光して撮像する撮像部と、
前記反射光を受光して複数の位相毎に複数の位相画像を撮像するように前記撮像部を制御する撮像制御部と、
前記撮像部により撮像された複数の位相画像に対し、同じ位相の複数の前記位相画像同士の加算処理を行って加算位相画像を生成する加算部と、
を備え、
前記撮像された複数の位相画像は、第1の条件で撮像された複数の第1の位相画像と、前記第1の条件と異なる第2の条件で撮像された1以上の第2の位相画像と、を含み、
前記第1の位相画像の数は、前記第2の位相画像の数よりも多く、
前記加算部は、少なくとも前記複数の第1の位相画像について、同じ位相の複数の前記第1の位相画像間の動き量を導出し、前記動き量に基づいて、該同じ位相の複数の第1の位相画像に対して補正を行い、前記加算処理により複数の位相毎に前記加算位相画像を生成する撮像装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、撮像システム、撮像装置および撮像方法に関する。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
対象物との距離を計測するために、強度変調した参照光を照射し、対象物で反射して受光することにより、距離取得用の4種類の位相をずらした位相画像を取得して、1つの距離画像を換算して生成する間接TOF(Time оf Flight)方式が知られている。例えば、主に建設現場または屋内空間をデータ取得しておき、クラウド等の後段処理で3D空間の復元データとして点群再現をすることができる。この場合、三脚等を使用すると、データを取得するだけで機材が嵩張ったり、撮影に時間を要したり、天井裏等の狭い空間では適用しにくい等の課題がある。そのため、ハンディで手軽にデータ取得できることが顧客価値である。
【0003】
このような距離計測装置として、光源部を発光させて撮像部で位相信号を取得し、取得した位相信号の格納部への格納を複数回繰り返し、複数回の位相信号から距離データを算出し距離画像を生成する距離計測装置が開示されている(例えば特許文献1)。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、手ぶれまたは被写体ぶれによって複数の位相画像にずれが生じる結果、その複数の位相画像に基づいて生成される距離画像の品質が落ちてしまうという問題があった。
【0005】
本発明は、上記に鑑みてなされたものであって、距離の算出精度の低下を抑制するための複数の位相画像に対する処理を実現することができる撮像システム、撮像装置および撮像方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明は、入力された複数の位相画像に対し、同じ位相の複数の前記位相画像同士の加算処理を行って加算位相画像を生成する加算部を有し、前記入力された複数の位相画像は、第1の条件で撮像された複数の第1の位相画像と、前記第1の条件と異なる第2の条件で撮像された1以上の第2の位相画像と、を含み、前記第1の位相画像の数は、前記第2の位相画像の数よりも多く、前記加算部は、少なくとも前記複数の第1の位相画像について、同じ位相の複数の前記第1の位相画像間の動き量を導出し、前記動き量に基づいて、該同じ位相の複数の第1の位相画像に対して補正を行い、前記加算処理により複数の位相毎に前記加算位相画像を生成することを特徴とする。
【発明の効果】
【0007】
本発明によれば、距離の算出精度の低下を抑制するための複数の位相画像に対する処理を実現することができる。
【図面の簡単な説明】
【0008】
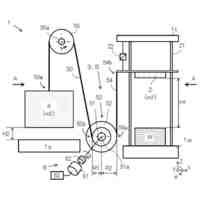
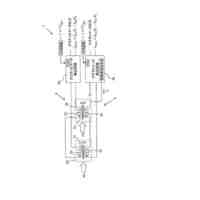
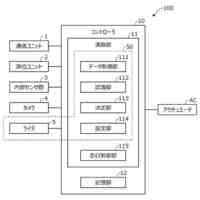
図1は、実施形態に係る撮像システムの概略構成の一例を示す図である。
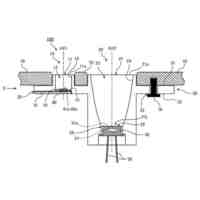
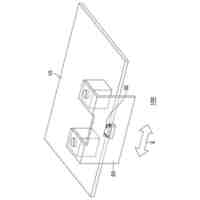
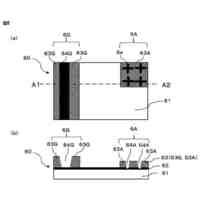
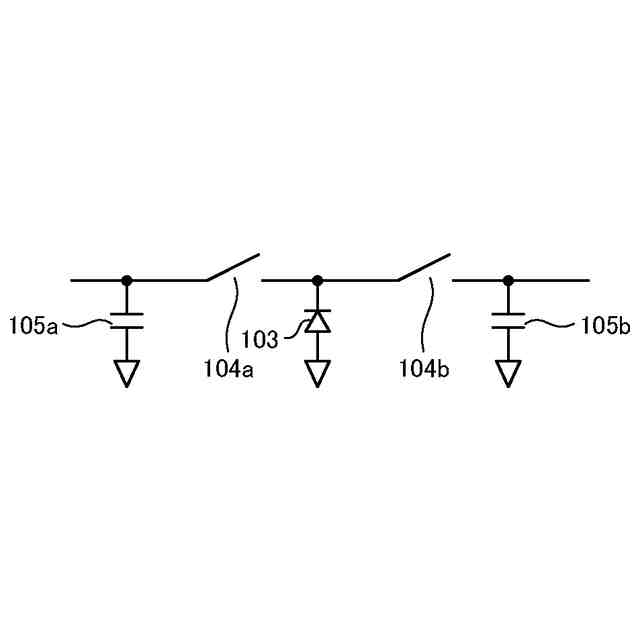
図2は、実施形態に係る受光センサ内の画素の構成の一例を示す図である。
図3は、実施形態に係る撮像システムにおいて照射光と反射光との遅延を説明する図である。
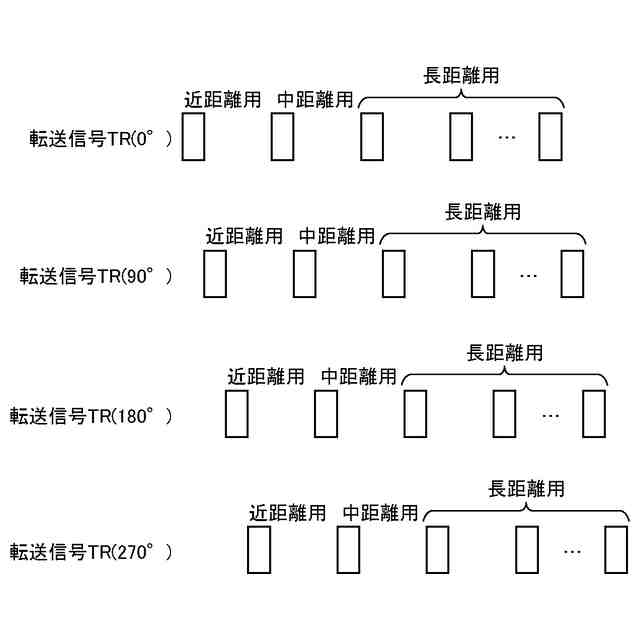
図4は、実施形態に係る撮像システムの変調信号、照射光、反射光および転送信号の関係の一例を示す図である。
図5は、正弦波変調方式の測距原理を示す図である。
図6は、パルス変調方式の測距原理を示す図である。
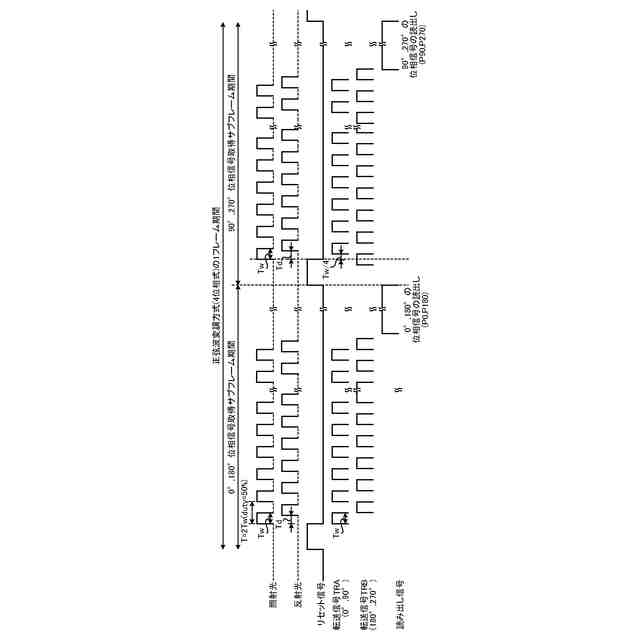
図7は、実施形態に係る撮像システムにおける各位相画像の撮像タイミングの一例を示す図である。
図8は、実施形態に係る撮像システムにおける各位相画像の撮像タイミングの別の例を示す図である。
図9は、実施形態に係る撮像システムにおける各位相画像の撮像タイミングの別の例を示す図である。
図10は、実施形態に係る撮像システムで撮像された位相画像のうち基準位相画像の選択の一例を示す図である。
図11は、実施形態に係る撮像システムで撮像された位相画像のうち基準位相画像の選択の別の例を示す図である。
図12は、実施形態に係る撮像システムで撮像された位相画像のうち基準位相画像の選択の別の例を示す図である。
図13は、実施形態に係る撮像システムで撮像された位相画像のうち基準位相画像の選択の別の例を示す図である。
図14は、実施形態に係る撮像システムのブレ補正前後の位相画像の一例を示す図である。
図15は、実施形態に係る撮像システムのブレ補正前後の距離画像の表示例を示す図である。
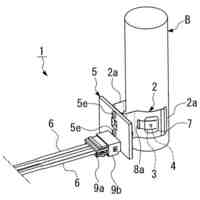
図16は、変形例に係る撮像システムの概略構成の一例を示す図である。
【発明を実施するための形態】
【0009】
以下に、図面を参照しながら、本発明に係る撮像システム、撮像装置および撮像方法の実施形態を詳細に説明する。また、以下の実施形態によって本発明が限定されるものではなく、以下の実施形態における構成要素には、当業者が容易に想到できるもの、実質的に同一のもの、およびいわゆる均等の範囲のものが含まれる。さらに、以下の実施形態の要旨を逸脱しない範囲で構成要素の種々の省略、置換、変更および組み合わせを行うことができる。
【0010】
また、コンピュータソフトウェアとは、コンピュータの動作に関するプログラム、その他コンピュータによる処理の用に供する情報であってプログラムに準ずるものをいう(以下、コンピュータソフトウェアは、ソフトウェアという)。アプリケーションソフトとは、ソフトウェアの分類のうち、特定の作業を行うために使用されるソフトウェアの総称である。一方、オペレーティングシステム(OS)とは、コンピュータを制御し、アプリケーションソフト等がコンピュータ資源を利用可能にするためのソフトウェアのことである。オペレーティングシステムは、入出力の制御、メモリやハードディスク等のハードウェアの管理、プロセスの管理といった、コンピュータの基本的な管理・制御を行っている。アプリケーションソフトウェアは、オペレーティングシステムが提供する機能を利用して動作する。プログラムとは、コンピュータに対する指令であって、一の結果を得ることができるように組み合わせたものをいう。また、プログラムに準ずるものとは、コンピュータに対する直接の指令ではないためプログラムとは呼べないが、コンピュータの処理を規定するという点でプログラムに類似する性質を有するものをいう。例えば、データ構造(データ要素間の相互関係で表される、データの有する論理的構造)がプログラムに準ずるものに該当する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
20日前
株式会社CCT
表示装置
19日前
日本精機株式会社
センサユニット
11日前
株式会社チノー
放射温度計
12日前
個人
コンベックスルール用測定部品
18日前
株式会社テイエルブイ
処理装置
5日前
トヨタ自動車株式会社
給水治具
17日前
TDK株式会社
ガスセンサ
3日前
大和製衡株式会社
組合せ計量装置
10日前
大和製衡株式会社
組合せ計量装置
10日前
大和製衡株式会社
組合せ計量装置
10日前
東将精工株式会社
測定器具補助具
19日前
東レエンジニアリング株式会社
衝撃試験機
20日前
三菱マテリアル株式会社
温度センサ
17日前
株式会社ミツトヨ
光学式エンコーダ
20日前
株式会社ティアンドデイ
温度測定装置
17日前
日立建機株式会社
作業機械
24日前
東レ株式会社
センサー素子及びガスセンサー
24日前
豊田合成株式会社
重量測定装置
17日前
株式会社 システムスクエア
検査装置
19日前
トヨタ自動車株式会社
表示装置
11日前
ニシム電子工業株式会社
液位検出装置
11日前
住友金属鉱山株式会社
検査装置
10日前
住友金属鉱山株式会社
セレン評価方法
10日前
太陽誘電株式会社
匂いセンサシステム
3日前
株式会社不二越
歯車寸法測定装置
19日前
笹田磁気計測研究所株式会社
磁気傾度計
12日前
株式会社ダイナックス
電流検出器
10日前
マグネデザイン株式会社
GSR素子の製造方法
5日前
マグネデザイン株式会社
磁界検出素子の製造方法
5日前
株式会社島津製作所
分注装置
18日前
本田技研工業株式会社
外界認識装置
12日前
トヨタ自動車株式会社
情報処理装置
11日前
群馬県
音響診断センサユニット
4日前
株式会社ティアンドデイ
携帯型温度測定装置
17日前
株式会社トクヤマ
磁性粒子を用いた試料前処理方法
12日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ