TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024052066
公報種別
公開特許公報(A)
公開日
2024-04-11
出願番号
2022158513
出願日
2022-09-30
発明の名称
接触検知装置
出願人
住友理工株式会社
代理人
弁理士法人あいち国際特許事務所
主分類
G01L
1/14 20060101AFI20240404BHJP(測定;試験)
要約
【課題】ノイズの影響が低減された接触検知装置を提供する。
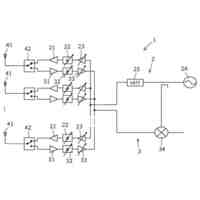
【解決手段】交流電源11は、周波数の異なる第一交流電圧と第二交流電圧とを切り替えて第一電極層22および第二電極層23に印加し、導体が静電型センサ7に接触した状態に対応する代替直交位相成分QAを格納する記憶部34と、第二電極層23に第一交流電圧が印加された時に抽出された第一直交位相成分Q1と、第二電極層23に第二交流電圧が印加された時に抽出された第二直交位相成分Q2とを比較する直交位相成分比較部31と、第一直交位相成分Q1と第二直交位相成分Q2とが第一直交位相誤差ΔQE1の範囲内である場合は、第一直交位相成分Q1に基づいて導体の接触を検知し、第一直交位相成分Q1と第二直交位相成分Q2とが第一直交位相誤差ΔQE1の範囲外である場合は、代替直交位相成分QAに基づいて導体の接触を検知する接触判定部33と、を備える接触検知装置10。
【選択図】図4
特許請求の範囲
【請求項1】
検知電極を備え、導体の接触を検知する静電型センサと、
前記検知電極に交流電圧を印加する交流電源と、
前記交流電圧が前記検知電極に印加された場合に前記検知電極から出力される信号を用いて、前記静電型センサのインピーダンスを同相位相成分および直交位相成分にて表した場合において少なくとも前記直交位相成分を抽出する直交復調器と、
前記直交復調器によって抽出された前記直交位相成分に基づいて、前記導体が前記静電型センサに接触したか否かを検出する計測器と、
を備える接触検知装置であって、
前記交流電源は、第一周波数の第一交流電圧と、第一周波数と異なる第二周波数の第二交流電圧と、を切り替えて前記検知電極に印加し、
前記計測器は、
前記導体が前記静電型センサに接触した状態に対応する代替直交位相成分を格納する記憶部と、
前記検知電極に前記第一交流電圧が印加された時に前記直交復調器によって抽出された第一直交位相成分と、前記検知電極に前記第二交流電圧が印加された時に前記直交復調器によって抽出された第二直交位相成分とを比較する直交位相成分比較部と、
前記第一直交位相成分と前記第二直交位相成分とが所定の第一直交位相誤差の範囲内である場合は、前記第一直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外である場合は、前記記憶部に格納されている前記代替直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知する接触判定部と、
を備える、接触検知装置。
続きを表示(約 2,600 文字)
【請求項2】
前記交流電源は、前記第一交流電圧と前記第二交流電圧と、を所定の周期で切り替えて前記検知電極に印加する、請求項1に記載の接触検知装置。
【請求項3】
前記代替直交位相成分は、予め前記記憶部に格納された初期値であって、前記計測器による接触検知中に更新されることのない値である、請求項1または2に記載の接触検知装置。
【請求項4】
前記計測器は、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲内である場合は、前記接触判定部に用いる前記第一直交位相成分を、前記記憶部に格納されている前記代替直交位相成分として更新する直交位相成分更新部を備え、
前記接触判定部は、前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外である場合は、前記記憶部にて更新された前記代替直交位相成分であって前回の判定に用いた前記代替直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知する、請求項1または2に記載の接触検知装置。
【請求項5】
前記直交復調器は、前記同相位相成分および前記直交位相成分を抽出し、
前記計測器は、前記直交復調器によって抽出された前記同相位相成分および前記直交位相成分に基づいて、前記導体が前記静電型センサに接触したか否かを検出し、
前記記憶部は、前記導体が前記静電型センサに接触した状態に対応する代替同相位相成分および前記代替直交位相成分を格納し、
前記計測器は、
前記検知電極に前記第一交流電圧が印加された時に前記直交復調器によって抽出された第一同相位相成分と、前記検知電極に前記第二交流電圧が印加された時に前記直交復調器によって抽出された第二同相位相成分と、を比較する同相位相成分比較部を備え、
前記接触判定部は、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲内であり、且つ、前記第一同相位相成分と前記第二同相位相成分とが所定の第一同相位相誤差の範囲内である場合は、前記第一直交位相成分および前記第一同相位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外であり、且つ、前記第一同相位相成分と前記第二同相位相成分とが前記第一同相位相誤差の範囲外である場合は、前記記憶部に格納されている前記代替直交位相成分および前記代替同相位相成分に基づいて、前記静電型センサへの前記導体の接触を検知する、請求項1または2に記載の接触検知装置。
【請求項6】
前記代替直交位相成分は、予め前記記憶部に格納された初期値であって、前記計測器による接触検知中に更新されることない値であり、
前記代替同相位相成分は、予め前記記憶部に格納された初期値であって、前記計測器による接触検知中に更新されることのない値である、請求項5に記載の接触検知装置。
【請求項7】
前記計測器は、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲内である場合は、前記接触判定部に用いる前記第一直交位相成分を、前記記憶部に格納されている前記代替直交位相成分として更新する直交位相成分更新部と、
前記第一同相位相成分と前記第二同相位相成分とが前記第一同相位相誤差の範囲内である場合は、前記接触判定部に用いる前記第一同相位相成分を、前記記憶部に格納されている前記代替同相位相成分として更新する同相位相成分更新部と、を備え、
前記接触判定部は、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外であり、且つ、前記第一同相位相成分と前記第二同相位相成分とが前記第一同相位相誤差の範囲外である場合は、前記記憶部にて更新された前記代替直交位相成分および前記代替同相位相成分であって、前回の判定に用いた前記代替直交位相成分および前記代替同相位相成分に基づいて、前記静電型センサへの前記導体の接触を検知する、請求項5に記載の接触検知装置。
【請求項8】
前記第一周波数は前記第二周波数よりも大きい、請求項1または2に記載の接触検知装置。
【請求項9】
前記交流電源は、前記第一交流電圧と、前記第二交流電圧と、前記第一周波数および前記第二周波数と異なる第三周波数の第三交流電圧を、切り替えて前記検知電極に印加し、
前記直交位相成分比較部は、
前記第一直交位相成分と、前記第二直交位相成分と、前記検知電極に前記第三交流電圧が印加された時に前記直交復調器によって抽出された第三直交位相成分と、を比較し、
前記接触判定部は、
前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲内である場合は、前記第一直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外である場合は、前記第一直交位相成分と前記第三直交位相成分とを比較し、前記第一直交位相成分と前記第三直交位相成分とが所定の第二直交位相誤差の範囲内である場合は、前記第一直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、前記第一直交位相成分と前記第三直交位相成分とが前記第二直交位相誤差の範囲外である場合は、前記第二直交位相成分と前記第三直交位相成分とを比較し、前記第二直交位相成分と前記第三直交位相成分とが所定の第三直交位相誤差の範囲内である場合は、前記第二直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、前記第二直交位相成分と前記第三直交位相成分とが前記第三直交位相誤差の範囲外である場合は、前記記憶部に格納されている前記代替直交位相成分に基づいて、前記静電型センサへの導体の接触を検知する、請求項1に記載の接触検知装置。
【請求項10】
前記交流電源は、前記第一交流電圧と、前記第二交流電圧と、前記第三交流電圧と、を所定の周期で切り替えて前記検知電極に印加する、請求項9に記載の接触検知装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、接触検知装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば自動車のステアリングホイール内に静電容量式のセンサを組み込むことで、人がステアリングホイールに触れているか否かを検出する、接触検知装置が知られている。接触検知装置において、静電容量を計測する際に、センサ電極に一定周期の電圧波形を印加し、印加波形した元波形とセンサを通した計測波形を比較することで、容量成分を算出するインピーダンス測定が用いられている。
【先行技術文献】
【特許文献】
【0003】
特開2021-190990号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来技術に係るインピーダンス測定においては、対象物に電圧を印加した際に、センサ電極の容量成分により電流の位相が遅れ、計測電圧波形と印加電圧波形に位相差が発生することを利用している。このため、インピーダンス測定の際に、印加している電圧の周波数付近の周波数ノイズがセンサ等に入力されたとき、印加波形が歪み、正確な静電容量計測ができないという課題があった。
【0005】
本発明は、かかる背景に鑑みてなされたものであり、ノイズの影響が低減された接触検知装置を提供しようとするものである。
【課題を解決するための手段】
【0006】
本発明の一態様は、
検知電極を備え、導体の接触を検知する静電型センサと、
前記検知電極に交流電圧を印加する交流電源と、
前記交流電圧が前記検知電極に印加された場合に前記検知電極から出力される信号を用いて、前記静電型センサのインピーダンスを同相位相成分および直交位相成分にて表した場合において少なくとも前記直交位相成分を抽出する直交復調器と、
前記直交復調器によって抽出された前記直交位相成分に基づいて、前記導体が前記静電型センサに接触したか否かを検出する計測器と、
を備える接触検知装置であって、
前記交流電源は、第一周波数の第一交流電圧と、第一周波数と異なる第二周波数の第二交流電圧と、を切り替えて前記検知電極に印加し、
前記計測器は、
前記導体が前記静電型センサに接触した状態に対応する代替直交位相成分を格納する記憶部と、
前記検知電極に前記第一交流電圧が印加された時に前記直交復調器によって抽出された第一直交位相成分と、前記検知電極に前記第二交流電圧が印加された時に前記直交復調器によって抽出された第二直交位相成分とを比較する直交位相成分比較部と、
前記第一直交位相成分と前記第二直交位相成分とが所定の第一直交位相誤差の範囲内である場合は、前記第一直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知し、前記第一直交位相成分と前記第二直交位相成分とが前記第一直交位相誤差の範囲外である場合は、前記記憶部に格納されている前記代替直交位相成分に基づいて、前記静電型センサへの前記導体の接触を検知する接触判定部と、
を備える、接触検知装置にある。
【発明の効果】
【0007】
本発明の一態様によれば、第一周波数の近傍の周波数のノイズが混入した場合でも、第二交流電圧の第二直交位相成分に基づいて、検知電極への導体の接触を検知することができる。また、第二周波数の近傍の周波数のノイズが混入した場合には、記憶部に格納された代替直交位相成分に基づいて、検知電極への導体の接触を検知することができる。これにより、接触検知装置についてノイズの影響を低減させることができる。
【図面の簡単な説明】
【0008】
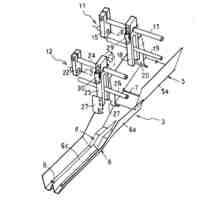
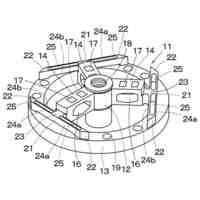
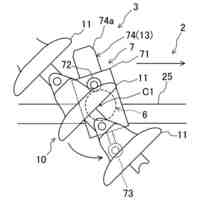
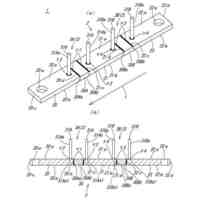
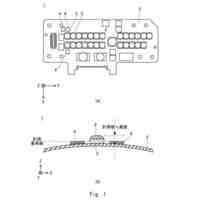
実施形態1の接触検知装置が適用されるステアリングホイールを示す正面図。
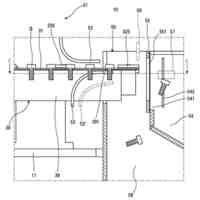
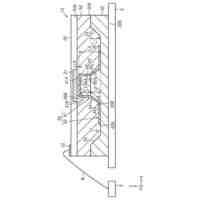
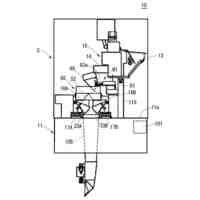
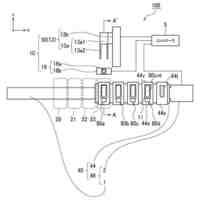
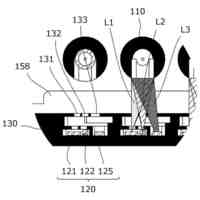
図1のII-II線断面図。
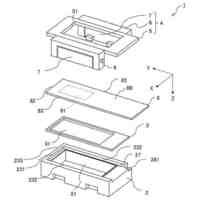
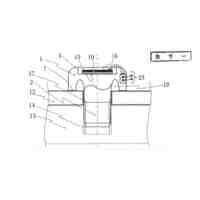
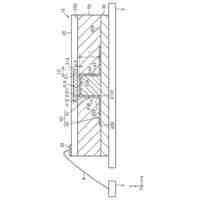
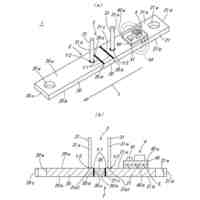
実施形態1の静電型センサを示す断面図。
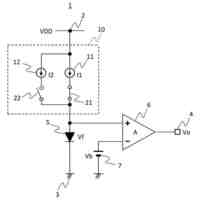
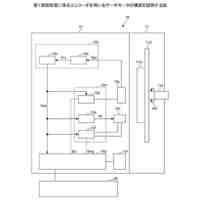
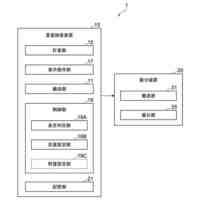
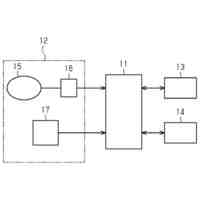
実施形態1の接触検知装置の構成を示すブロック図
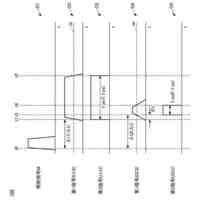
実施形態1の静電型センサにおいて、ノイズの影響がなく、且つ、導体が非接触の状態の出力インピーダンスを、直交位相成分および同相位相成分にて表した状態を示す模式図。
実施形態1の静電型センサにおいて、導体が接触した状態の出力インピーダンスと、導体が非接触の状態の出力インピーダンスと、を直交位相成分および同相位相成分にて表した状態を示す模式図。
実施形態1の接触検知装置の動作を示すメインフローを示すフローチャート。
実施形態1のノイズ判定処理を示すフローチャート。
実施形態1の直交位相成分比較処理を示すフローチャート。
実施形態1の同相位相成分比較処理を示すフローチャート。
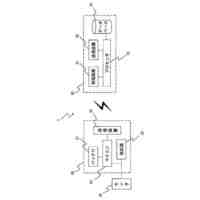
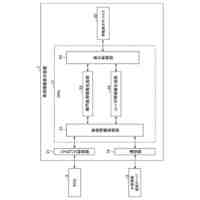
実施形態2の接触検知装置の構成を示すブロック図。
実施形態2のノイズ判定処理を示すフローチャート。
実施形態2の直交位相成分比較処理を示すフローチャート。
実施形態2の同相位相成分比較処理を示すフローチャート。
【発明を実施するための形態】
【0009】
(実施形態1)
1.ステアリングホイール1の構成
本発明に係る接触検知装置10を車両(図示せず)のステアリングホイール1に適用した実施形態1について説明する。まず、ステアリングホイール1の構造について図1~図2を参照して説明する。ステアリングホイール1は、図1に示すように、円形リング状に形成されたリング部2と、リング部2よりも小さく形成されてリング部2の径方向の内側に配置されるコア部3と、コア部3とリング部2とを接続する複数(本形態では3つ)の接続部4とを備える。ただし、接続部4の個数は特に限定されず、1~2つ、又は4つ以上でもよい。
【0010】
以下の説明では、車両(図示せず)に搭乗した運転者(図示せず)から見て右方を矢線Xで示す方向とし、運転者から見て上方を矢線Zで示す方向とし、運転者の正面に接近する方向を矢線Yで示す方向とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日東精工株式会社
検査装置
23日前
キヤノン株式会社
枠部材
2日前
個人
交差点形状表現アルゴリズム
15日前
テクノス株式会社
反射装置
18日前
エイブリック株式会社
温度センサ
19日前
大和製衡株式会社
組合せ秤
19日前
日本電波工業株式会社
感知センサ
1日前
株式会社SUBARU
車両
1日前
住江織物株式会社
排尿検知システム
3日前
個人
多元作用力検出機能性締結金具
8日前
株式会社D.O.N
人感装置
19日前
日本無線株式会社
レーダ装置
8日前
エイブリック株式会社
半導体装置。
19日前
月島食品工業株式会社
分析方法
18日前
日本電気株式会社
LiDAR装置
23日前
株式会社昭和測器
ロードセル
17日前
ミツミ電機株式会社
測距装置
17日前
ローム株式会社
磁気検出装置
17日前
ヤマハ株式会社
歪センサ装置
19日前
ローム株式会社
磁気検出装置
23日前
富士電機株式会社
エンコーダ
23日前
中国電力株式会社
不良碍子検出装置
18日前
株式会社大林組
風速再現装置
19日前
フォロフライ株式会社
情報処理装置
23日前
サンコール株式会社
電流検出器
18日前
株式会社イシダ
計量装置
23日前
サンコール株式会社
電流検出器
18日前
株式会社 キョーワ
食品秤量搬送装置
2日前
キヤノン株式会社
検査装置及び検査方法
2日前
株式会社ビードットメディカル
計測装置
1日前
住友金属鉱山株式会社
異物検査装置
1日前
株式会社イシダ
X線検査装置
17日前
中部電力株式会社
電柱位置記憶装置
19日前
トヨタ自動車株式会社
回路基板の検査方法
3日前
株式会社デンソーウェーブ
携帯端末
17日前
バイオニクス株式会社
光学測定装置
9日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ