TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024044300
公報種別
公開特許公報(A)
公開日
2024-04-02
出願番号
2022149744
出願日
2022-09-21
発明の名称
基板搬送装置
出願人
株式会社FUJI
代理人
弁理士法人 共立特許事務所
主分類
H05K
13/02 20060101AFI20240326BHJP(他に分類されない電気技術)
要約
【課題】基板の搬送経路にそれぞれ設定されて基板の有無を検出する二つの検出位置の相対位置関係を正確に求めることができる基板搬送装置を提供する。
【解決手段】基板搬送装置は、基板の搬送経路の第一位置に前記基板が存在するか否かを検出する第一センサと、前記搬送経路において前記第一位置より下流側の第二位置に前記基板が存在するか否かを検出する第二センサと、前記搬送経路に沿って前記基板を搬送させて、前記第一センサおよび前記第二センサの一方に前記基板の前端または後端を検出させた後、前記基板を搬送させて前記第一センサおよび前記第二センサの他方に前記基板の前端または後端を検出させ、二つの検出の間で前記基板を搬送した搬送距離に基づいて、前記第一位置と前記第二位置との第一離間距離を算出する第一算出部と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
基板の搬送経路の第一位置に前記基板が存在するか否かを検出する第一センサと、
前記搬送経路において前記第一位置より下流側の第二位置に前記基板が存在するか否かを検出する第二センサと、
前記搬送経路に沿って前記基板を搬送させて、前記第一センサおよび前記第二センサの一方に前記基板の前端または後端を検出させた後、前記基板を搬送させて前記第一センサおよび前記第二センサの他方に前記基板の前端または後端を検出させ、二つの検出の間で前記基板を搬送した搬送距離に基づいて、前記第一位置と前記第二位置との第一離間距離を算出する第一算出部と、
を備える基板搬送装置。
続きを表示(約 1,400 文字)
【請求項2】
前記基板搬送装置は、
前記基板の搬送方向の滑りを許容しつつ前記基板を保持した状態で前記搬送経路に沿って移動する移動部材と、
前記移動部材を移動させる搬送駆動部と、を備え、
前記第一算出部は、前記搬送駆動部を制御することにより前記移動部材を移動させて前記基板を搬送させ、前記移動部材の移動距離に基づいて前記基板の前記搬送距離を求める、
請求項1に記載の基板搬送装置。
【請求項3】
前記第一算出部は、前記基板の前記滑りが発生し難い遅い移動速度で前記移動部材を移動させ、前記移動部材の前記移動距離を前記基板の前記搬送距離とする、請求項2に記載の基板搬送装置。
【請求項4】
前記第一算出部は、前記基板に代えて、前記滑りを低減する滑り防止部を有して前記基板と同じ寸法の計測用治具を用い、前記移動部材の前記移動距離を前記計測用治具の前記搬送距離とする、請求項2に記載の基板搬送装置。
【請求項5】
前記移動部材は、輪転しながら前記搬送経路に沿って移動するコンベアベルトであり、
前記搬送駆動部は、駆動パルスを用いた制御により前記コンベアベルトを輪転させるパルスモータであり、
前記第一算出部は、前記駆動パルスのパルス数に基づいて前記コンベアベルトの前記移動距離を求める、
請求項2~4のいずれか一項に記載の基板搬送装置。
【請求項6】
前記第一算出部は、前記基板を順方向に搬送させて前記第一位置を通過させた後に前記基板を逆方向に搬送させ、前記第一センサに前記基板の後端を検出させた後、前記基板を順方向に搬送させて前記第二センサに前記基板の前端または後端を検出させる、
請求項1~4のいずれか一項に記載の基板搬送装置。
【請求項7】
前記第一算出部は、前記第一センサに前記基板の後端を検出させるとともに、前記第二センサに前記基板の前端を検出させ、二つの検出の間の前記基板の前記搬送距離に前記基板の搬送方向の長さ寸法を加算して前記第一離間距離を算出する、請求項6に記載の基板搬送装置。
【請求項8】
前記第一算出部は、前記第一センサに前記基板の後端を検出させるとともに、前記第二センサに前記基板の後端を検出させ、二つの検出の間の前記基板の前記搬送距離を前記第一離間距離とする、請求項6に記載の基板搬送装置。
【請求項9】
前記搬送経路に位置する前記基板を検出可能な検出部を制御して、前記第二センサが前記基板の前端または後端を検出したときの前記基板の位置を検出させ、検出結果に基づいて、前記基板を停止させる所定の停止位置と前記第二位置との第二離間距離を算出する第二算出部を備える、
請求項1に記載の基板搬送装置。
【請求項10】
前記基板を保持した状態で前記搬送経路に沿って移動する移動部材と、
前記移動部材を移動させる搬送駆動部と、
前記第一離間距離および前記第二離間距離に基づいて前記搬送駆動部を制御することにより、前記移動部材を移動させて前記基板を前記停止位置に停止させる搬送制御部と、
を備える、請求項9に記載の基板搬送装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、搬送経路に沿って基板を搬送する基板搬送装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
回路パターンが形成された基板に対基板作業を実施して、基板製品を量産する技術が普及している。一般的に、対基板作業を実施する対基板作業機は、基板の搬入、停止位置への位置決め、および搬出を行う基板搬送装置を備える。基板搬送装置の多くは、搬送途中の基板の位置を検出するセンサを備え、センサの検出結果に基づいて基板を所定の停止位置に停止させる。停止位置の位置誤差が大きい場合、基板搬送装置は、基板を再搬送して停止位置を補正する。これにより、対基板作業の実施が可能となる。この種の基板搬送装置に関する一技術例が特許文献1に開示されている。
【0003】
特許文献1の基板コンベア制御装置は、電動モータの作動により周回させられる基板コンベアの搬送経路に設けられて基板の特定部分(前端、後端)を検出する第一基板センサおよび第二基板センサと、いずれかの基板センサの検出結果に基づいて電動モータの作動量を指令する指令部と、基板センサの検出と電動モータの停止との間の経過時間、または二つの基板センサの検出の間の電動モータの作動量に基づいて基板の停止位置を推定する推定部と、を備える。これによれば、二つの基板センサによって基板を検出することにより、基板の停止位置の推定を安価に行うことができ、推定結果を種々に活用することができる、とされている。
【先行技術文献】
【特許文献】
【0004】
特開2012-99668号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、特許文献1の技術例では、第一基板センサおよび第二基板センサの検出結果に基づいて、基板の停止位置を推定できる点で好ましい。しかしながら、第一基板センサおよび第二基板センサとして、検出光が基板によって遮光されるか否かを検出する遮光検出方式のセンサが使用される。このため、基板の種類を変更するときの段取り替え作業時などに、センサの位置の変更や検出感度の調整などを行う場合に検出位置が変位する可能性がある。換言すると、第一基板センサが検出を行う第一位置、および第二基板センサが検出を行う第二位置に位置誤差が生じる場合がある。仮に位置誤差が生じていると、基板の停止位置の推定精度が低下する。
【0006】
それゆえ、本明細書では、基板の搬送経路にそれぞれ設定されて基板の有無を検出する二つの検出位置の相対位置関係を正確に求めることができる基板搬送装置を提供することを解決すべき課題とする。
【課題を解決するための手段】
【0007】
本明細書は、基板の搬送経路の第一位置に前記基板が存在するか否かを検出する第一センサと、前記搬送経路において前記第一位置より下流側の第二位置に前記基板が存在するか否かを検出する第二センサと、前記搬送経路に沿って前記基板を搬送させて、前記第一センサおよび前記第二センサの一方に前記基板の前端または後端を検出させた後、前記基板を搬送させて前記第一センサおよび前記第二センサの他方に前記基板の前端または後端を検出させ、二つの検出の間で前記基板を搬送した搬送距離に基づいて、前記第一位置と前記第二位置との第一離間距離を算出する第一算出部と、を備える基板搬送装置を開示する。
【0008】
なお、本明細書では、出願当初の請求項6において「請求項1~4のいずれか一項に記載の基板搬送装置」を「請求項1~5のいずれか一項に記載の基板搬送装置」に変更した技術的思想、出願当初の請求項9において「請求項1に記載の基板搬送装置」を「請求項1~8のいずれか一項に記載の基板搬送装置」に変更した技術的思想、および出願当初の請求項15において「請求項1~4、9~12のいずれか一項に記載の基板搬送装置」を「請求項1~12のいずれか一項に記載の基板搬送装置」に変更した技術的思想を開示している。
【発明の効果】
【0009】
本明細書で開示する基板搬送装置によれば、第一算出部は、基板を搬送させて第一センサおよび第二センサに基板の前端または後端を検出させることにより、基板の搬送距離に基づいて第一位置と第二位置との第一離間距離を算出するので、二つの検出位置の相対位置関係に相当する第一離間距離を正確に求めることができる。
【図面の簡単な説明】
【0010】
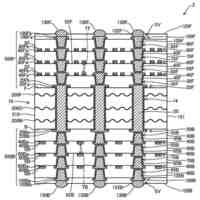
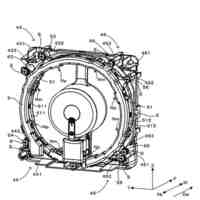
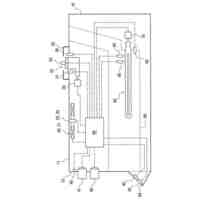
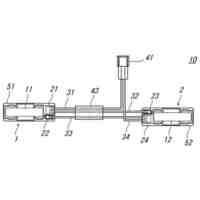
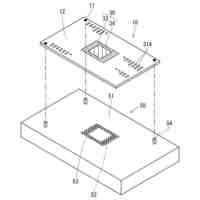
実施形態の基板搬送装置を適用する部品装着機の全体構成を模式的に示す平面図である。
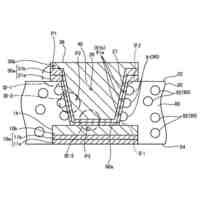
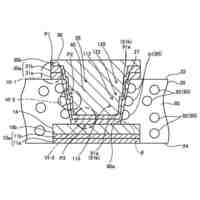
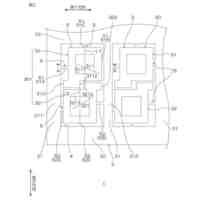
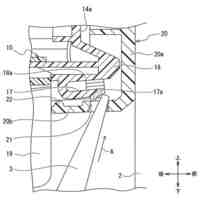
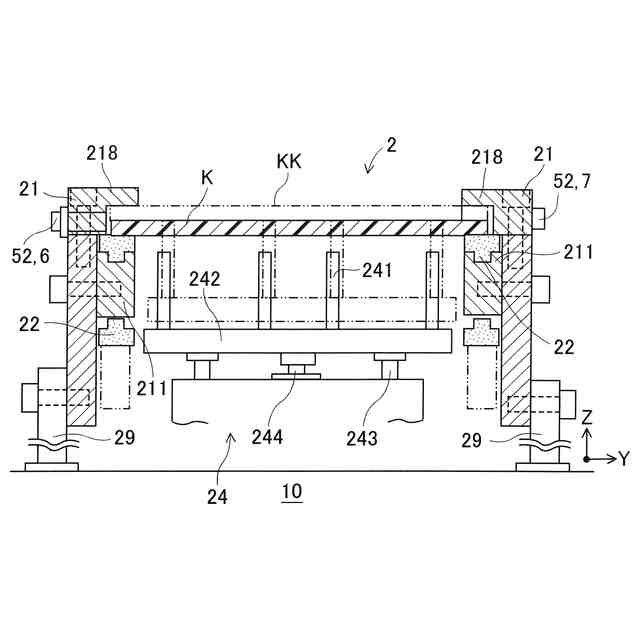
基板搬送装置の停止位置付近の正面断面図である。
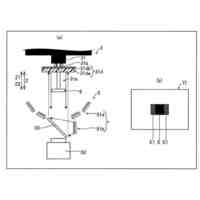
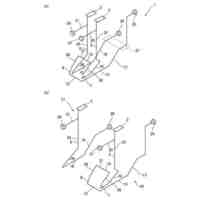
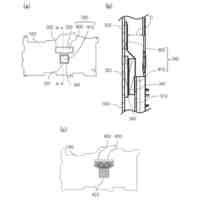
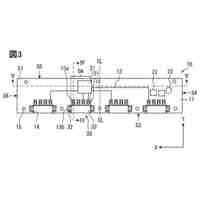
基板搬送装置の側面図である。
基板搬送装置に設定される第一位置、第二位置、および停止位置を模式的に示す平面図である。
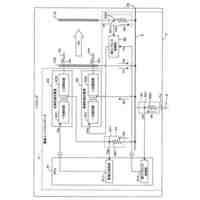
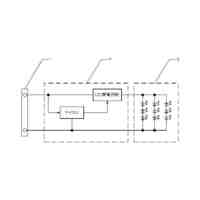
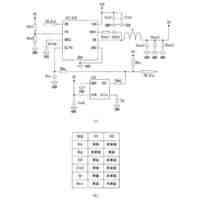
基板搬送装置の制御の構成を示すブロック図である。
基板搬送装置の動作を説明するメイン動作フローの図である。
図6のステップS3の第一算出部の動作の詳細を説明するサブ動作フローの図である。
第一算出部の動作を基板の搬送によって模式的に説明する模式図である。
図7のステップS16およびステップS17の変形例を模式的に説明する模式図である。
図6のステップS4の第二算出部の動作の詳細を説明するサブ動作フローの図である。
第二算出部の動作を模式的に説明する模式図である。
停止位置調整部が初期設定するタイムチャートの図である。
図12のタイムチャートに対応する基板の位置を示す模式図である。
図6のステップS8の停止位置調整部の動作の詳細を説明するサブ動作フローの図である。
停止位置調整部による停止位置の調整動作を説明する調整タイムチャートの図である。
図15の調整タイムチャートに対応する基板の位置を示すとともに、停止位置の調整動作を模式的に説明する模式図である。
基板に代えて用いる計測用治具の裏面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東レ株式会社
有機EL表示装置
1か月前
株式会社カネカ
製造システム
11日前
株式会社カネカ
有機EL装置
1か月前
中部電力株式会社
ホルダ
17日前
個人
電流駆動型素子の電流制御器
23日前
イビデン株式会社
配線基板
1か月前
イビデン株式会社
配線基板
1か月前
イビデン株式会社
積層基板
1か月前
イビデン株式会社
プリント配線板
1か月前
日本電気株式会社
電子機器
26日前
株式会社ヤナギヤ
ジュール加熱鍋
26日前
イビデン株式会社
プリント配線板
25日前
イビデン株式会社
プリント配線板
25日前
ヤマハ発動機株式会社
部品実装装置
1か月前
株式会社キーエンス
除電装置
1か月前
株式会社キーエンス
除電装置
1か月前
リンナイ株式会社
加熱調理器
16日前
株式会社大林組
照明システム
1か月前
コックス株式会社
自動点灯制御一体化ランプ
18日前
日東電工株式会社
配線回路基板
29日前
日東電工株式会社
集合体シート
1か月前
キヤノン株式会社
有機発光素子
16日前
富士電子工業株式会社
誘導加熱コイル
1か月前
星和電機株式会社
シート状電波吸収体
3日前
株式会社デンソー
電気部品
1か月前
清水建設株式会社
加熱井戸
1か月前
株式会社デンソー
回路基板
19日前
株式会社クラベ
ヒータユニット及びその応用品
29日前
株式会社富士通ゼネラル
電子機器
1か月前
株式会社ベスト
照明装置用センサ
9日前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
回路基板、画像形成装置
1か月前
キヤノン株式会社
回路基板、画像形成装置
25日前
株式会社クラベ
ヒータユニット及び車両用シート
1か月前
株式会社デンソー
電池監視装置
11日前
イビデン株式会社
配線基板の製造方法
16日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ