TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024042386
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022147066
出願日
2022-09-15
発明の名称
搬送装置およびその制御方法
出願人
芝浦機械株式会社
代理人
個人
,
個人
,
個人
主分類
H02K
41/03 20060101AFI20240321BHJP(電力の発電,変換,配電)
要約
【課題】可動子を精度よく位置決めすることができる搬送装置およびその制御方法を提案する。
【解決手段】実施形態に係る搬送装置は、固定子と、固定子に対向して配設され、固定子に対して移動可能に設けられている複数の可動子と、固定子と通信可能に接続された制御部とを備える。複数の可動子は、それぞれ目盛りを有するスケール部と、互いに逆極性の第1磁極部および第2磁極部を含む複数の磁極対とを備える。固定子は、複数の可動子を移動させる磁力を発生させるコイル部と、複数の磁極対の極性を検知する磁極検知部と、スケール部の目盛りを読み取るスケール検出部とを備える。
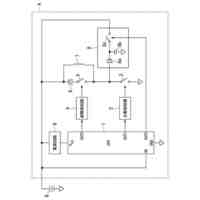
【選択図】図1
特許請求の範囲
【請求項1】
固定子と、
前記固定子に対向して配設され、前記固定子に対して移動可能に設けられている複数の可動子と、
前記固定子と通信可能に接続された制御部とを備える搬送装置であって、
前記複数の可動子は、
それぞれ目盛りを有するスケール部と、
互いに逆極性の第1磁極部および第2磁極部を含む複数の磁極対と、を備え、
前記固定子は、
前記複数の可動子を移動させる磁力を発生させるコイル部と、
前記複数の磁極対の極性を検知する磁極検知部と、
前記スケール部の前記目盛りを読み取るスケール検出部とを備える、
搬送装置。
続きを表示(約 1,300 文字)
【請求項2】
前記スケール部および前記複数の磁極対は、それぞれ前記複数の可動子の移動方向に対して略平行に、該可動子に設けられており、
1つの前記可動子に設けられた前記スケール部の前記移動方向における長さは、該可動子に設けられた前記複数の磁極対の前記移動方向における配列の長さと同じかそれよりも長い、
請求項1に記載の搬送装置。
【請求項3】
前記複数の可動子のそれぞれにおいて、前記複数の磁極対の配列の一端には前記第1磁極部が配置され、該配列の他端には前記第2磁極部が配置されている、請求項1に記載の搬送装置。
【請求項4】
前記磁極検知部は、前記第1磁極部または前記第2磁極部の磁極をそれぞれ検知する第1~3磁極センサを備え、
前記第1~3磁極センサは、前記複数の可動子の移動方向に第1、第2および第3磁極センサの順番あるいはこれとは逆の順番に配列されており、前記可動子の移動によって三相信号を出力する、
請求項1に記載の搬送装置。
【請求項5】
前記第1磁極センサと前記第2磁極センサとの間の距離と、前記第2磁極センサと前記第3磁極センサとの間の距離とがほぼ等しい、
請求項4に記載の搬送装置。
【請求項6】
前記第1~3磁極センサは、前記第1磁極部を検知した場合第1論理信号を出力し、前記第2磁極部を検知した場合第2論理信号を出力する、
請求項1に記載の搬送装置。
【請求項7】
前記制御部は、
前記第1~3磁極センサのいずもが前記第1論理信号を出力している状態において、前記第1磁極センサの出力が最初に前記第2論理信号に変化した場合、
前記可動子が前記第1磁極センサから前記第3磁極センサへ向かう第1方向に移動していることを示す第1移動情報を生成し、かつ、前記可動子を検出したことを示す第1フラグを活性化する、
請求項6に記載の搬送装置。
【請求項8】
前記制御部は、
前記第1~3磁極センサのいずもが前記第2論理信号を出力している状態において、前記第3磁極センサの出力が最初に前記第1論理信号に変化した場合、
前記可動子が前記第1方向の反対方向である第2方向に移動していることを示す第2移動情報を生成し、かつ、前記可動子を検出したことを示す第1フラグを活性化する、
請求項7に記載の搬送装置。
【請求項9】
前記制御部は、
前記第1移動情報または前記第2移動情報を生成した場合、前記スケール検出部により検出されている前記スケール部の位置情報を有効にする、
請求項7に記載の搬送装置。
【請求項10】
前記コイル部は、前記第1磁極センサの前記第2方向側に隣接して配置されており、
前記制御部は、
前記第1移動情報を生成し、前記第1フラグを活性化した後、前記第3磁極センサが前記第2論理信号を出力したときに、前記コイル部に磁力を発生させる第1制御指令を活性化する、請求項8に記載の搬送装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
実施形態は、搬送装置およびその制御方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
リニアモータを動力とする搬送装置が知られており、このような搬送装置においては、磁極センサを用いて、可動子の停止位置を位置決めする手法が知られている。しかしながら、磁極センサで位置決めする手法では、可動子を精度よく位置決めすることができなかった。また、リニアスケールにより位置決めする手法もある。しかし、リニアスケールにより位置決めする手法では、マルチスライダーのように複数の可動子を正確に制御することができなかった。
【先行技術文献】
【特許文献】
【0003】
特開第2010-142033号公報
特開第2005-341632号公報
特開第2016-82653号公報
特開第2010-130740号公報
特開第2010-263681号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
そこで、可動子を精度よく位置決めすることができる搬送装置およびその制御方法を提案する。
【課題を解決するための手段】
【0005】
実施形態に係る搬送装置は、固定子と、固定子に対向して配設され、固定子に対して移動可能に設けられている複数の可動子と、固定子と通信可能に接続された制御部とを備える。複数の可動子は、それぞれ目盛りを有するスケール部と、互いに逆極性の第1磁極部および第2磁極部を含む複数の磁極対とを備える。固定子は、複数の可動子を移動させる磁力を発生させるコイル部と、複数の磁極対の極性を検知する磁極検知部と、スケール部の目盛りを読み取るスケール検出部とを備える。
【図面の簡単な説明】
【0006】
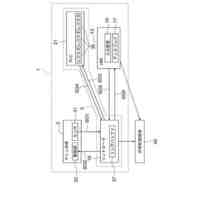
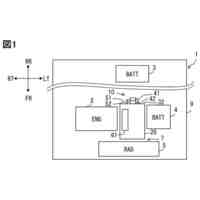
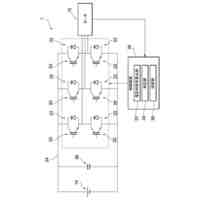
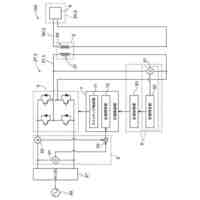
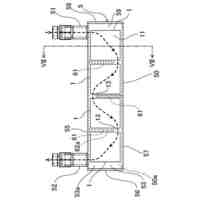
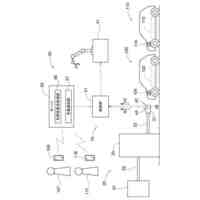
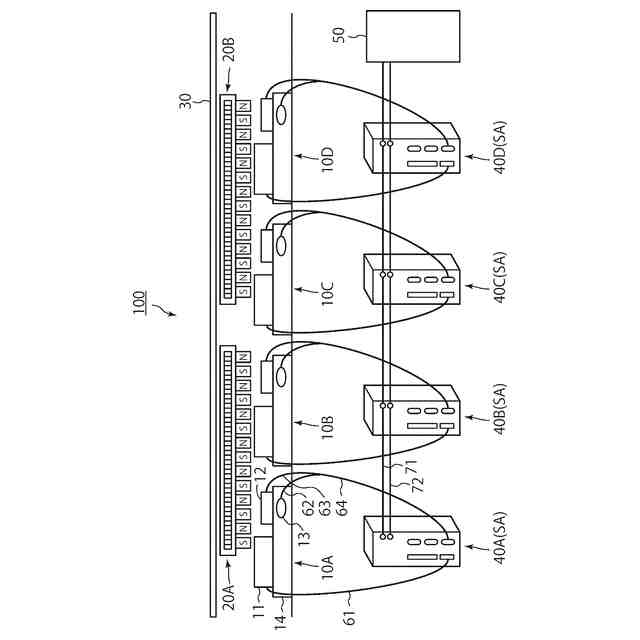
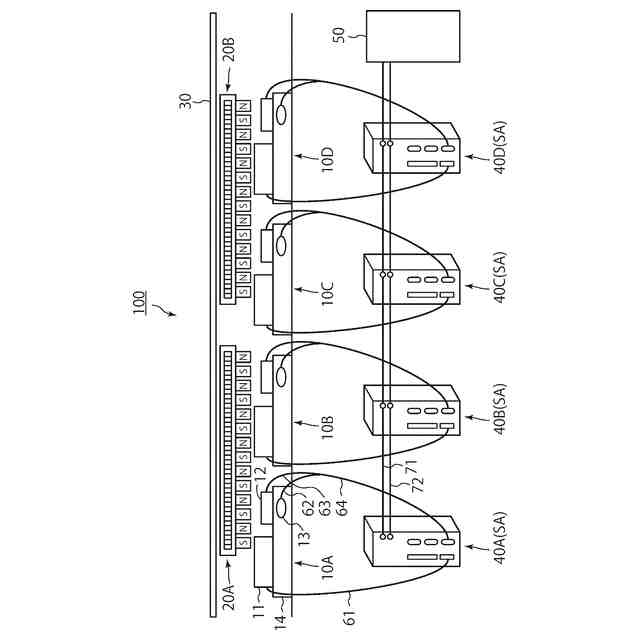
第1実施形態に係る搬送装置の構成を示すブロック図である。
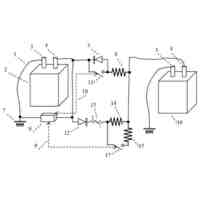
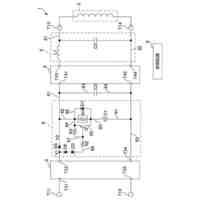
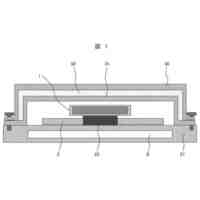
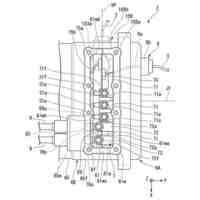
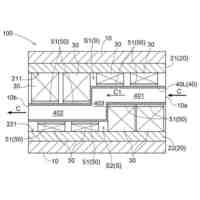
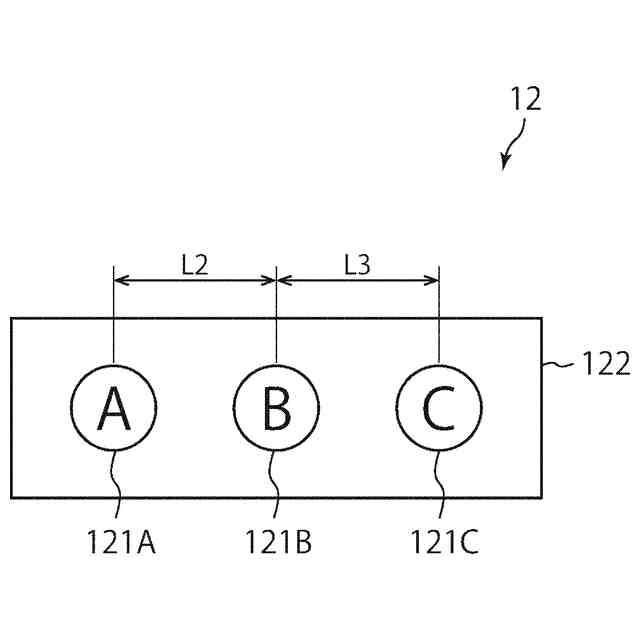
第1実施形態に係る固定子の構成を示すブロック図である。
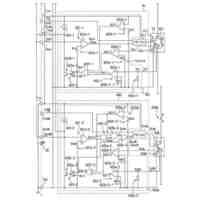
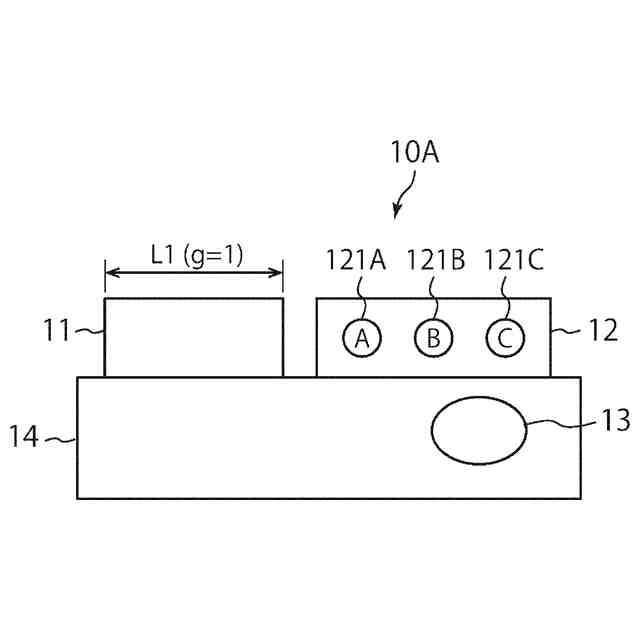
第1実施形態に係る第1~3磁極センサの構成を示すブロック図である。
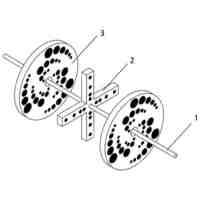
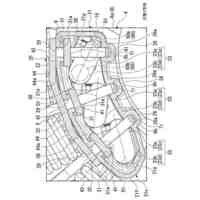
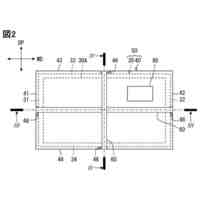
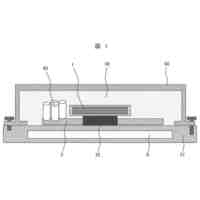
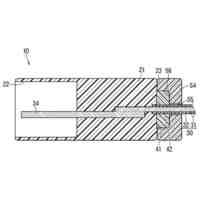
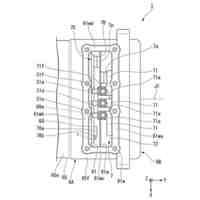
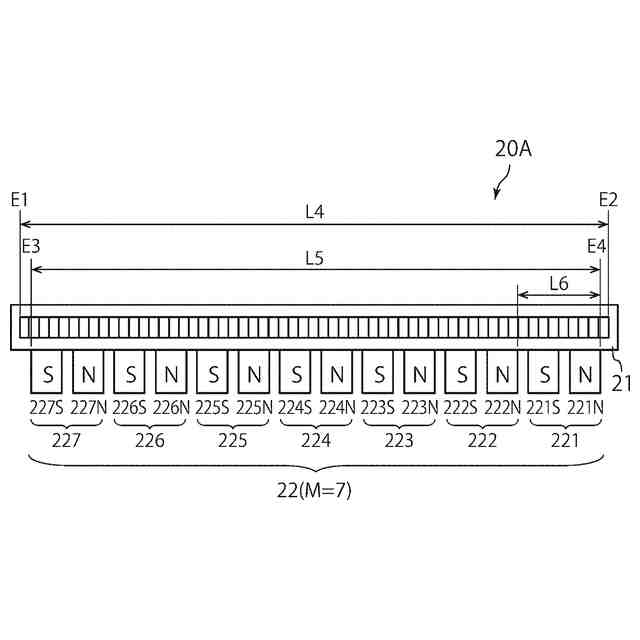
第1実施形態に係る可動子の構成を示すブロック図である。
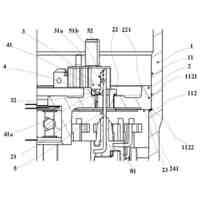
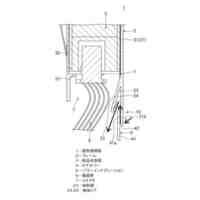
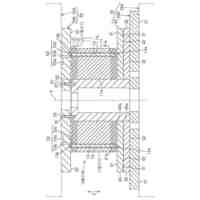
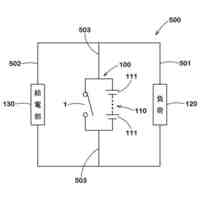
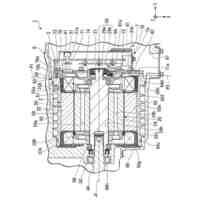
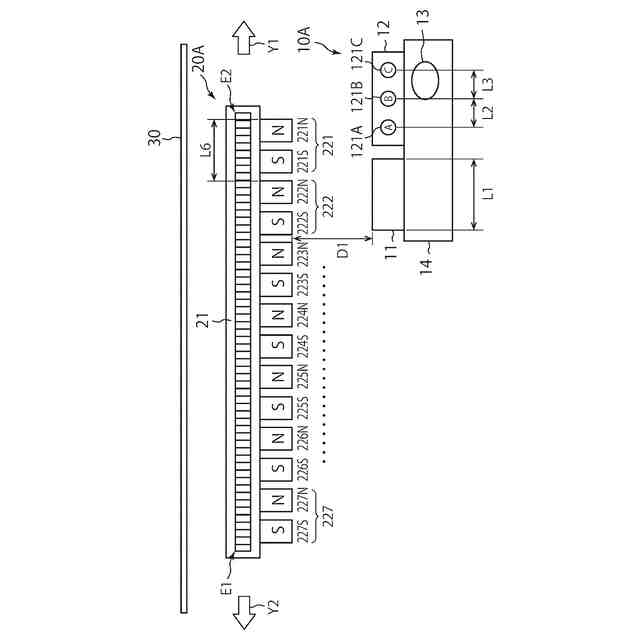
第1実施形態に係る可動子と固定子との構成を示すブロック図である。
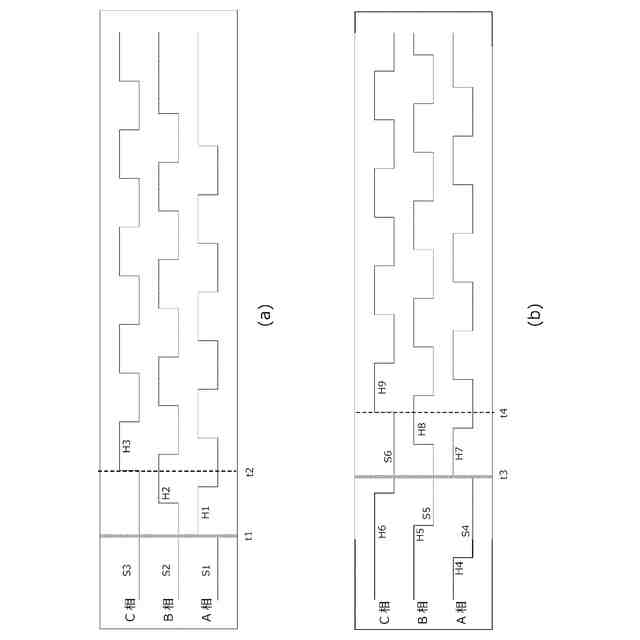
第1実施形態に係る第1~3磁極センサが出力する第1および第2論理信号の波形を示す図である。
第1実施形態に係る第1~3磁極センサが出力する第1および第2論理信号の波形を示す図である。
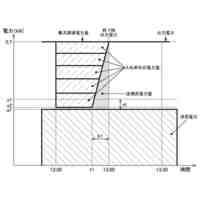
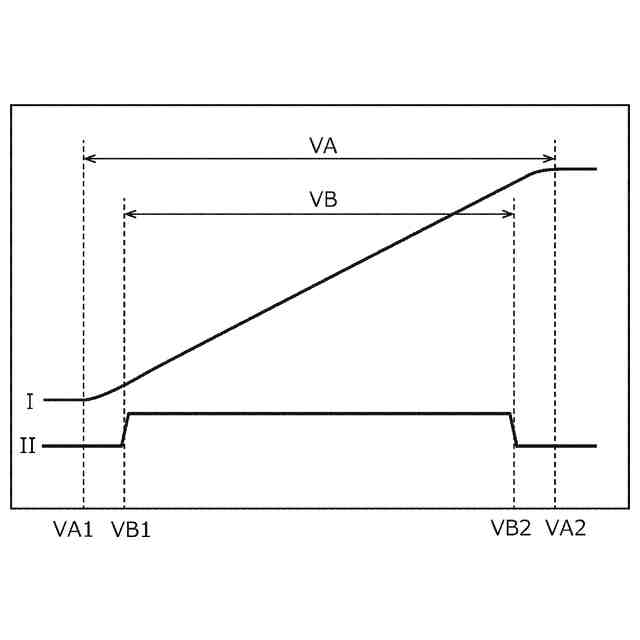
第1実施形態に係るスケール検出部が出力するスケール検出値の積算値、および、制御部によるセンサ有効フラグを示す図である。
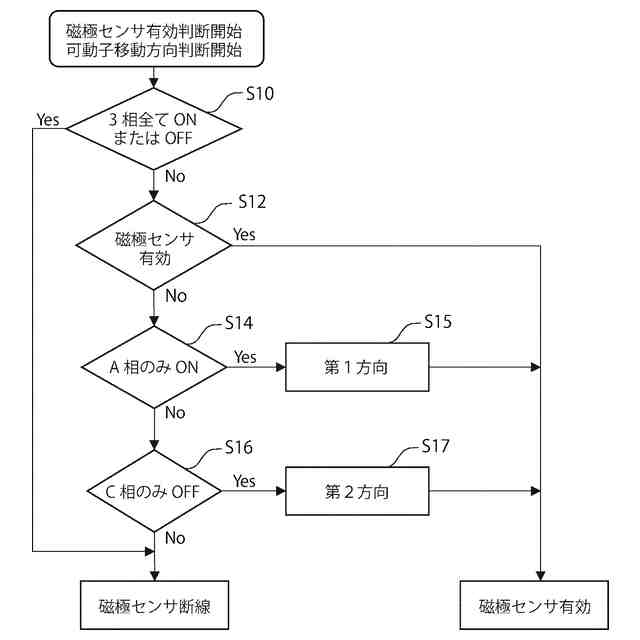
第1実施形態に係る制御部による磁極センサ有効の判断、および、可動子移動方向の判断の処理を示すフローチャートである。
第1実施形態に係る制御部によるスケール情報有効の判断、および、制御座標更新の判断の処理を示すフローチャートである。
第1実施形態に係る制御部による可動子制御の開始の判断、および、可動子制御の終了の判断の処理を示すフローチャートである。
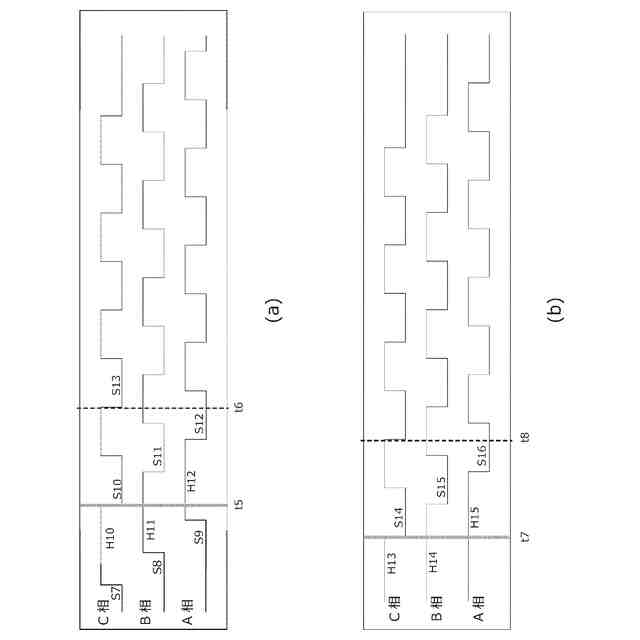
第1実施形態の具体例に係る第1~3磁極センサが出力する第1および第2論理信号の波形、および、制御部による磁極センサ有効の判断、可動子移動方向の判断ならびに可動子制御の開始と終了との判断を示す図である。
第1実施形態の具体例に係る第1~3磁極センサが出力する第1および第2論理信号の波形、および、制御部による磁極センサ有効の判断、可動子移動方向の判断ならびに可動子制御の開始と終了との判断を示す図である。
第1実施形態の具体例に係る第1~3磁極センサの構成を示すブロック図である。
【発明を実施するための形態】
【0007】
以下、図面を参照して本発明に係る実施形態を説明する。本実施形態は、本発明を限定するものではない。
【0008】
図面は模式的または概念的なものであり、各部分の比率などは、必ずしも現実のものと同一とは限らない。明細書と図面において、既出の図面に関して前述したものと同様の要素には同一の符号を付して詳細な説明は適宜省略する。
【0009】
(第1実施形態)
(搬送装置100の構成)
図1は、第1実施形態に係る搬送装置100の構成の一例を示す図である。搬送装置100は、複数の固定子10A~10D、複数の可動子20A、20B、移動路30、複数のサーボアンプ40A~40D、コントローラ50、動力線61、センサ線62~64、および、通信線71~72を備える。
【0010】
複数の固定子10A~10Dは、それぞれ同一の構成を有してもよい。尚、固定子10A~10Dには、スケール検出部13が設けられていない場合もある。複数の可動子20A~20Bは、それぞれ同一の構成を有する。複数のサーボアンプ40A~40Dは、それぞれ同一の構成を有する。したがって以下では、固定子10A、可動子20A、および、サーボアンプ40Aを説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
芝浦機械株式会社
成形機
2日前
個人
2軸モーター
1日前
ニデック株式会社
モータ
16日前
個人
バッテリーの補助装置
9日前
個人
磁力のみを動力とするモーター
10日前
株式会社アイドゥス企画
モータシリンダ
16日前
日産自動車株式会社
発電装置
9日前
オムロン株式会社
電力変換装置
2日前
株式会社ミツバ
回転電機
9日前
株式会社ミツバ
制動装置
2日前
株式会社ミツバ
回転電機
9日前
ブラザー工業株式会社
制御装置
16日前
ヴィガラクス株式会社
電気供給システム
3日前
ニチコン株式会社
電源装置
9日前
富士電機株式会社
半導体モジュール
2日前
矢崎総業株式会社
電気接続箱
3日前
個人
超電導ロータリー式発電原動機
2日前
株式会社デンソー
電力変換装置
3日前
株式会社デンソー
電力変換装置
3日前
トヨタ紡織株式会社
ロータの製造方法
10日前
株式会社日立製作所
電気機器
9日前
トヨタ自動車株式会社
駆動装置
3日前
株式会社日立製作所
電気機器
9日前
大阪瓦斯株式会社
電力調達装置
16日前
株式会社ダイフク
非接触給電設備
3日前
住友電装株式会社
配線部材
4日前
ボーンズ株式会社
放電回路
9日前
株式会社テイエルブイ
発電装置
3日前
ニデック株式会社
駆動装置
16日前
ニデック株式会社
駆動装置
16日前
ニデック株式会社
駆動装置
16日前
ダイハツ工業株式会社
グロメット
2日前
株式会社アイシン
給電補助システム
2日前
株式会社テイエルブイ
発電装置及び蒸気システム
3日前
株式会社テイエルブイ
発電装置及び蒸気システム
3日前
株式会社アイシン
回路モジュール構造
16日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ