TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024042339
公報種別
公開特許公報(A)
公開日
2024-03-28
出願番号
2022146993
出願日
2022-09-15
発明の名称
物体の積付順序決定プログラム、物体の積付順序決定方法、物体の積付順序決定装置、およびパレタイズロボット
出願人
株式会社IHI
,
株式会社IHI物流産業システム
代理人
個人
,
個人
,
個人
,
個人
主分類
B65G
57/03 20060101AFI20240321BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】予め生成された積付位置計画に基づいて、多関節ロボット装置が適正に積付作業を行うことができるように積付順序を決定する物体の積付順序決定装置を提供する。
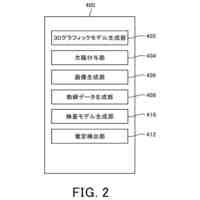
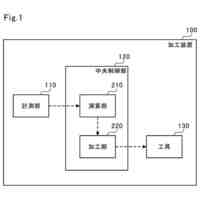
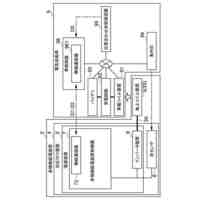
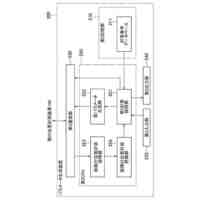
【解決手段】物体の積付順序決定装置としての積付順序決定部22は、積付位置計画情報取得部221と、アイテム情報取得部222と、全体積付順序決定部226とを備える。積付位置計画情報取得部221は、積付対象の複数の物体に対応する複数のアイテム情報を、積付先の容器に対応する容器情報内の所定位置に割り当てることで、容器内における物体の積付位置を示した積付位置計画情報を取得する。アイテム情報取得部222は、積付位置計画情報内のアイテム情報の容器情報内における位置情報を取得する。全体積付順序決定部226は、取得した情報に基づいて、積付位置計画情報内のアイテム情報ごとの積付順序を決定することで、物体ごとの容器に対する積付順序を決定する。
【選択図】図1
特許請求の範囲
【請求項1】
コンピュータに、
積付対象の複数の物体に対応する複数のアイテム情報を、積付先の容器に対応する容器情報内の所定位置に割り当てることで、前記容器内における前記物体の積付位置を示した積付位置計画情報を取得する積付位置計画情報取得機能と、
前記積付位置計画情報内のアイテム情報の前記容器情報内における幅方向、奥行方向、および高さ方向の位置情報を取得するアイテム情報取得機能と、
前記アイテム情報取得機能により取得した情報に基づいて、前記積付位置計画情報内のアイテム情報ごとの積付順序を決定することで、前記物体ごとの前記容器に対する積付順序を決定する全体積付順序決定機能と、
を実行させるための物体の積付順序決定プログラム。
続きを表示(約 1,500 文字)
【請求項2】
前記積付位置計画情報内のアイテム情報を、水平方向に隣接した同一形状のアイテム情報のまとまりであるレイヤーごとに分類した情報を取得するレイヤー分類情報取得機能と、
前記アイテム情報取得機能で取得した情報に基づいて、前記積付位置計画情報内における前記レイヤーごとの積付順序を決定するレイヤー積付順序決定機能と、
前記アイテム情報取得機能で取得した情報に基づいて、各レイヤー内における、該当するアイテム情報ごとの積付順序を決定するアイテム積付順序決定機能と、
をさらに有し、
前記全体積付順序決定機能では、前記レイヤー積付順序決定機能で決定した前記レイヤーごとの積付順序と、前記アイテム積付順序決定機能で決定した各レイヤー内におけるアイテム情報ごとの積付順序とに基づいて、前記積付位置計画情報内のアイテム情報ごとの積付順序を決定する、
請求項1に記載の物体の積付順序決定プログラム。
【請求項3】
前記レイヤー積付順序決定機能では、前記容器の手前側または奥側を優先して、前記レイヤーごとの積付順序を決定し、
前記アイテム積付順序決定機能では、前記容器の手前側または奥側を優先して、前記アイテム情報ごとの積付順序を決定する
請求項2に記載の物体の積付順序決定プログラム。
【請求項4】
前記レイヤー積付順序決定機能では、所定の高さ未満のレイヤーに対しては前記容器の手前側を優先して積付順序を決定し、所定の高さ以上のレイヤーに対しては前記容器の奥側を優先して積付順序を決定し、
前記アイテム積付順序決定機能では、所定の高さ未満のアイテム情報に対しては前記容器の手前側を優先して積付順序を決定し、所定の高さ以上のアイテム情報に対しては前記容器の奥側を優先して積付順序を決定する
請求項3に記載の物体の積付順序決定プログラム。
【請求項5】
積付対象の複数の物体に対応する複数のアイテム情報を、積付先の容器に対応する容器情報内の所定位置に割り当てることで、前記容器内における前記物体の積付位置を示した積付位置計画情報を取得し、
前記積付位置計画情報内のアイテム情報の前記容器情報内における幅方向、奥行方向、および高さ方向の位置情報を取得し、
取得した積付位置計画情報および前記積付位置計画情報内のアイテム情報の位置情報に基づいて、前記積付位置計画情報内のアイテム情報ごとの積付順序を決定することで、前記物体ごとの前記容器に対する積付順序を決定する、
物体の積付順序決定方法。
【請求項6】
積付対象の複数の物体に対応する複数のアイテム情報を、積付先の容器に対応する容器情報内の所定位置に割り当てることで、前記容器内における前記物体の積付位置を示した積付位置計画情報を取得する積付位置計画情報取得部と、
前記積付位置計画情報内のアイテム情報の前記容器情報内における幅方向、奥行方向、および高さ方向の位置情報を取得するアイテム情報取得部と、
前記アイテム情報取得部により取得した情報に基づいて、前記積付位置計画情報内のアイテム情報ごとの積付順序を決定することで、前記物体ごとの前記容器に対する積付順序を決定する全体積付順序決定部と、
を備える物体の積付順序決定装置。
【請求項7】
請求項6に記載の物体の積付順序決定装置で決定された積付順序に基づいて、該当する物体を前記容器内の前記積付位置計画情報で示される位置に積み付ける動作機構
を備えたパレタイズロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、物体の積付順序決定プログラム、物体の積付順序決定方法、物体の積付順序決定装置、およびパレタイズロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
物流システムにおいては、パレット等の容器に複数個の荷物を積み付けて移動させることで、効率良く荷物の搬送を行っている。その際、パレットに対して単一種類の荷物を積み付ける単載を行うとは限らず、複数種類の荷物を積み付ける複載を行う場合もある。単載の場合は、予め好適な荷物の積付パターンを決めておくことで、複数のパレットに対してこの積付パターンで効率良く積付作業を行うことができる。しかし混載の場合は、荷物の種類や数によって好適な積付パターンが異なるため、パレットごとに荷物の積付位置計画を行う必要がある。
【0003】
混載の積み付け作業は、主に作業員が荷物の種類や数を認識して試行錯誤することで行っているため、(1) 積付位置計画の優劣や作業時間が作業者によって異なる、(2) 試行錯誤を伴う作業を行うことで荷物が劣化したり破損したりする恐れがある、(3) 作業者が重量物を把持して中腰で作業することにより、作業者の身体への負荷が大きい、などの問題点がある。
【0004】
上記の問題点(1)、(2)の一部を解決する技術として、パレットに対する荷物の積付位置計画を自動生成する技術が開示されている。この技術では、積み付け対象の荷物の種類に基づいて、パレットに複数種類の荷物を混載するための各荷物の積付位置を算出する。この技術を用いることで、パレットに複数種類の荷物を混載する場合に、効率良く積み付け作業を行うことができる。
【先行技術文献】
【特許文献】
【0005】
特許第6012943号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の問題点(3)を解決するための技術的手段として、ロボット装置を用いて自動で積付作業を行うことが考えられる。積付作業に用いるロボット装置の典型的なものとして、多関節ロボット装置がある。多関節ロボット装置は、台座上に複数の関節部分を有するアーム部が設置されて構成されている。
【0007】
このような構成の多関節ロボット装置は、(i) 最下部の台座が固定された状態で使用されるため、積付作業中にアーム部分と既に積み付けられた荷物との間で干渉が生じやすい、(ii) アーム部の可動範囲が限定されている、等の特性により動作上の制約が大きい。
【0008】
そのため、予め生成された積付位置計画に基づいて多関節ロボット装置が積付作業を行う場合、積付順序によっては、積み付けが不可能な荷物が生じることがあるという問題があった。自動生成される積付位置計画は、積載率を向上させるために高い密度で荷物が積載されるように生成されるため、このような問題が生じる可能性が高くなる。
【0009】
本開示は上記事情に鑑みてなされたものであり、予め生成された積付位置計画に基づいて、多関節ロボット装置が適正に積付作業を行うことができるように積付順序を決定する、物体の積付順序決定プログラム、物体の積付順序決定方法、物体の積付順序決定装置、およびパレタイズロボットの提供を目的とする。
【課題を解決するための手段】
【0010】
本開示に係る物体の積付順序決定プログラムは、コンピュータに、積付対象の複数の物体に対応する複数のアイテム情報を、積付先の容器に対応する容器情報内の所定位置に割り当てることで、前記容器内における前記物体の積付位置を示した積付位置計画情報を取得する積付位置計画情報取得機能と、前記積付位置計画情報内のアイテム情報の前記容器情報内における幅方向、奥行方向、および高さ方向の位置情報を取得するアイテム情報取得機能と、前記アイテム情報取得機能により取得した情報に基づいて、前記積付位置計画情報内のアイテム情報ごとの積付順序を決定することで、前記物体ごとの前記容器に対する積付順序を決定する全体積付順序決定機能と、を実行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社IHIインフラシステム
塗装具
8日前
株式会社IHIアグリテック
農作業機
14日前
株式会社IHI
交通システム
1か月前
株式会社IHI
検査システム
27日前
株式会社IHI
水流発電装置
14日前
株式会社IHIインフラシステム
橋梁用常設足場
14日前
株式会社IHI
加工装置および加工方法
23日前
株式会社IHI
造形方法及びサポート部材
6日前
株式会社IHI
エンジンの吸排気システム
1か月前
株式会社IHI
積層造形装置及び積層造形方法
22日前
株式会社IHI
位置推定システム及び位置推定方法
23日前
株式会社IHI
積層造形装置及び積層造形プログラム
22日前
北海道電力株式会社
散気体及びその製造方法
8日前
株式会社IHI検査計測
FBGセンサ固定治具及びFBGセンサ固定方法
13日前
株式会社IHI
非接触給電設備、非接触給電方法及び対応付け装置
7日前
株式会社IHI
電力制御装置、電力制御方法、及び電力制御プログラム
1か月前
株式会社IHI
流体機械
7日前
株式会社IHI
燃料電池システム、および、燃料電池システムの運転方法
1か月前
株式会社IHI
パラメータ生成装置、情報処理装置、および積付位置計画装置
1か月前
株式会社IHI
パラメータ生成装置、情報処理装置、および積付位置計画装置
1か月前
株式会社IHI
輸送計画生成装置、輸送計画生成方法、および輸送計画生成プログラム
1か月前
株式会社IHIアグリテック
コントロール部が接続された車速連動型の散布機およびコントロール部
1か月前
株式会社IHI
物体の積付順序決定プログラム、物体の積付順序決定方法、物体の積付順序決定装置、およびパレタイズロボット
1か月前
株式会社IHI
移動コスト計算装置、輸送計画生成装置、移動コスト計算方法、輸送計画生成方法、移動コスト計算プログラム、および輸送計画生成プログラム
1か月前
個人
構造体
2か月前
個人
半蓋半箱筒
4か月前
個人
衣類カバー
7か月前
個人
折り畳み製品
6か月前
個人
「即時結束具」
6か月前
個人
テープホルダー
5か月前
個人
開封用カッター
22日前
個人
段ボール用キリ
7か月前
個人
コード長さ調整器
5か月前
個人
パウチ容器
1か月前
個人
粘着テープカッタ
6か月前
個人
折りたたみコップ
1か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ