TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025180536
公報種別
公開特許公報(A)
公開日
2025-12-11
出願番号
2024087939
出願日
2024-05-30
発明の名称
補正方法
出願人
セイコーエプソン株式会社
代理人
弁理士法人旺知国際特許事務所
主分類
G03B
21/00 20060101AFI20251204BHJP(写真;映画;光波以外の波を使用する類似技術;電子写真;ホログラフイ)
要約
【課題】プロジェクターが投射画像を補正する際の補正の精度を高める。
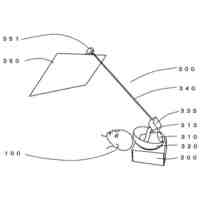
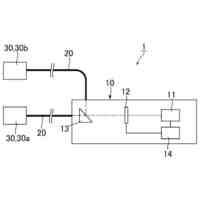
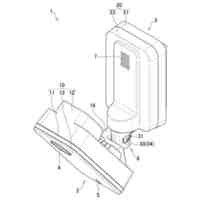
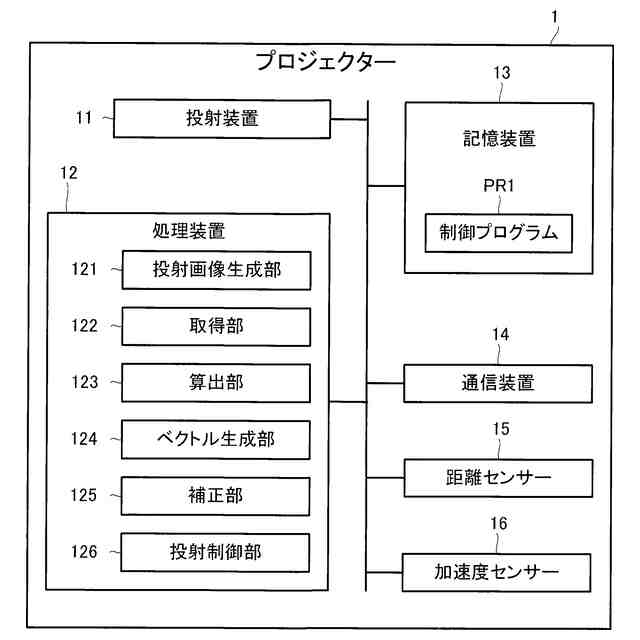
【解決手段】プロジェクター1から投射面PPに投射される投射画像PIの補正方法であって、距離センサー15の出力に基づいて、距離センサー15から投射面PP上の複数の位置までの複数の距離を示す深度情報を取得することと、深度情報に基づいて平面の位置を算出することと、平面の第1法線ベクトルnを算出することと、プロジェクター1の座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルgを算出することと、重力ベクトルgと第1法線ベクトルnとの内積が、水平面と投射面PPとがなす角の余弦となるように、第1法線ベクトルnを変換することにより、第2法線ベクトルnngを生成することと、第2法線ベクトルnngに基づいて、投射画像PIを補正することと、を含む。
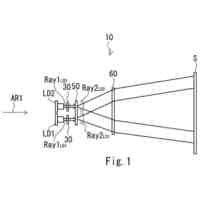
【選択図】図1
特許請求の範囲
【請求項1】
プロジェクターから投射面に投射される投射画像の補正方法であって、
距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、
前記深度情報に基づいて平面の位置を算出することと、
前記平面の第1法線ベクトルを算出することと、
前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、
前記重力ベクトルと前記第1法線ベクトルとの内積が、水平面と前記投射面とがなす角の余弦となるように、前記第1法線ベクトルを変換することにより、第2法線ベクトルを生成することと、
前記第2法線ベクトルに基づいて、前記投射画像を補正することと、
を含むことを特徴とする補正方法。
続きを表示(約 1,600 文字)
【請求項2】
プロジェクターから投射面に投射される投射画像の補正方法であって、
距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、
前記深度情報に基づいて平面の位置を算出することと、
前記平面の第1法線ベクトルを算出することと、
前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、
前記重力ベクトルと前記第1法線ベクトルとの外積を算出することにより、前記重力ベクトルと前記第1法線ベクトルとの両方に直交する直交ベクトルを生成することと、
前記直交ベクトルに沿う軸を中心に、前記重力ベクトルを、水平面と前記投射面とがなす角だけ回転させた回転ベクトルを、前記投射面の法線ベクトルである第2法線ベクトルとして生成することと、
前記第2法線ベクトルに基づいて、前記投射画像を補正することと、
を含むことを特徴とする補正方法。
【請求項3】
プロジェクターから投射面に投射される投射画像の補正方法であって、
距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、
前記深度情報に基づいて平面の位置を算出することと、
前記平面の第1法線ベクトルを算出することと、
前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、
前記重力ベクトルと前記第1法線ベクトルとの外積を算出することにより、前記重力ベクトルと前記第1法線ベクトルとの両方に直交する直交ベクトルを生成することと、
前記直交ベクトルと前記重力ベクトルとの外積を算出することにより、前記直交ベクトルと前記重力ベクトルとの両方に直交する第2法線ベクトルを生成することと、
前記第2法線ベクトルに基づいて、前記投射画像を補正することと、
を含むことを特徴とする補正方法。
【請求項4】
前記距離センサーとは異なるカメラによって前記投射面を撮像することで、前記投射面の撮像画像を取得することと、
前記距離センサーの座標系と前記カメラの座標系とを互いに対応付ける対応関係に基づいて、前記撮像画像を、前記距離センサーの座標系に変換した変換画像を生成することと、
前記変換画像に基づいて、前記距離センサーの検出範囲における前記投射面の位置を示す情報を生成することと、を更に含み、
前記第2法線ベクトルを生成することは、
前記情報に基づいて、前記プロジェクターの座標系において、前記第1法線ベクトルを構成する成分のうち、光軸と直交すると共に、互いに直交する2軸の方向の成分のいずれかを変換することによって、前記第2法線ベクトルを生成することを含むことを特徴とする、
請求項1に記載の補正方法。
【請求項5】
前記第2法線ベクトルを生成することは、
前記プロジェクターの座標系において、前記第1法線ベクトルを構成する成分のうち、光軸と直交すると共に、互いに直交する2軸のうち、鉛直方向となす角度が小さい軸の成分を変換することにより、前記第2法線ベクトルを生成することを含むことを特徴とする、
請求項1に記載の補正方法。
【請求項6】
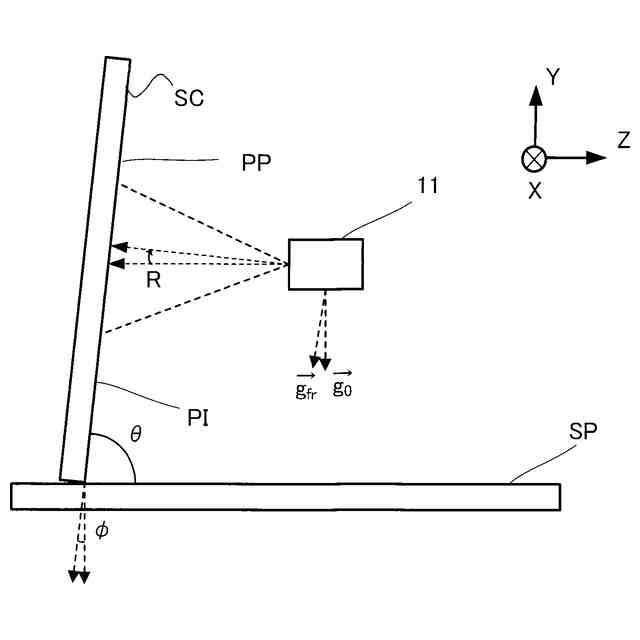
前記投射面における前記投射画像の形状が所定の形状となるように、設置面と前記プロジェクターの光軸とがなす角度を調整した場合に、調整前における前記重力ベクトルと、調整後における前記重力ベクトルとのなす角度に基づいて、前記水平面と前記投射面とがなす角を算出することを更に含むことを特徴とする、
請求項1又は請求項2に記載の補正方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、補正方法に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、プロジェクターに備わる距離センサーによる計測値を用いて、投射面の法線ベクトルを決定し、決定した法線ベクトルを用いて、投射画像を補正する技術が用いられてきた。
【0003】
例えば、特許文献1に係るプロジェクターは、ToF(Time of Flight)センサーを用いて、投射面上の複数の光点の深度情報を取得し、複数の深度情報に基づいて、投射面の法線ベクトルを決定する。更に、当該プロジェクターは、当該法線ベクトルに基づいて、当該プロジェクターのオフセット情報を取得し、当該オフセット情報に基づいて投射画像を補正する。
【先行技術文献】
【特許文献】
【0004】
国際公開第2022/193560号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に係るプロジェクターは、投射画像を補正するために、距離センサーの測定値のみを用いるため、補正の精度が距離センサーの精度に依存してしまう。
【課題を解決するための手段】
【0006】
本発明の第1の態様に係る補正方法は、プロジェクターから投射面に投射される投射画像の補正方法であって、距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、前記深度情報に基づいて平面の位置を算出することと、前記平面の第1法線ベクトルを算出することと、前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、前記重力ベクトルと前記第1法線ベクトルとの内積が、水平面と前記投射面とがなす角の余弦となるように、前記第1法線ベクトルを変換することにより、第2法線ベクトルを生成することと、前記第2法線ベクトルに基づいて、前記投射画像を補正することと、を含むことを特徴とする。
【0007】
本発明の第2の態様に係る補正方法は、プロジェクターから投射面に投射される投射画像の補正方法であって、距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、前記深度情報に基づいて平面の位置を算出することと、前記平面の第1法線ベクトルを算出することと、前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、前記重力ベクトルと前記第1法線ベクトルとの外積を算出することにより、前記重力ベクトルと前記第1法線ベクトルとの両方に直交する直交ベクトルを生成することと、前記直交ベクトルに沿う軸を中心に、前記重力ベクトルを、水平面と前記投射面とがなす角だけ回転させた回転ベクトルを、前記投射面の法線ベクトルである第2法線ベクトルとして生成することと、前記第2法線ベクトルに基づいて、前記投射画像を補正することと、を含むことを特徴とする。
【0008】
本発明の第3の態様に係る補正方法は、プロジェクターから投射面に投射される投射画像の補正方法であって、距離センサーの出力に基づいて、前記距離センサーから前記投射面上の複数の位置までの複数の距離を示す深度情報を取得することと、前記深度情報に基づいて平面の位置を算出することと、前記平面の第1法線ベクトルを算出することと、前記プロジェクターの座標系と対応付けられた加速度センサーの出力に基づいて、重力ベクトルを算出することと、前記重力ベクトルと前記第1法線ベクトルとの外積を算出することにより、前記重力ベクトルと前記第1法線ベクトルとの両方に直交する直交ベクトルを生成することと、前記直交ベクトルと前記重力ベクトルとの外積を算出することにより、前記直交ベクトルと前記重力ベクトルとの両方に直交する第2法線ベクトルを生成することと、前記第2法線ベクトルに基づいて、前記投射画像を補正することと、を含むことを特徴とする。
【図面の簡単な説明】
【0009】
プロジェクター1の構成例を示すブロック図。
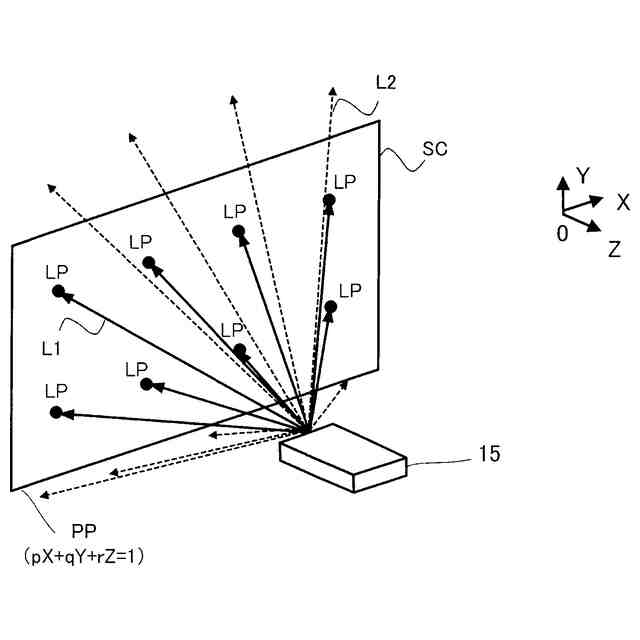
取得部122が取得する深度情報の一例を示す図。
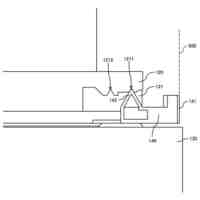
プロジェクター1の設置面SPと投射面PPとがなす角度θの算出方法の例の説明図。
プロジェクター1の設置面SPと投射面PPとがなす角度θの算出方法の例の説明図。
プロジェクター1の設置面SPと投射面PPとがなす角度θの算出方法の例の説明図。
プロジェクター1の設置面SPと投射面PPとがなす角度θの算出方法の例の説明図。
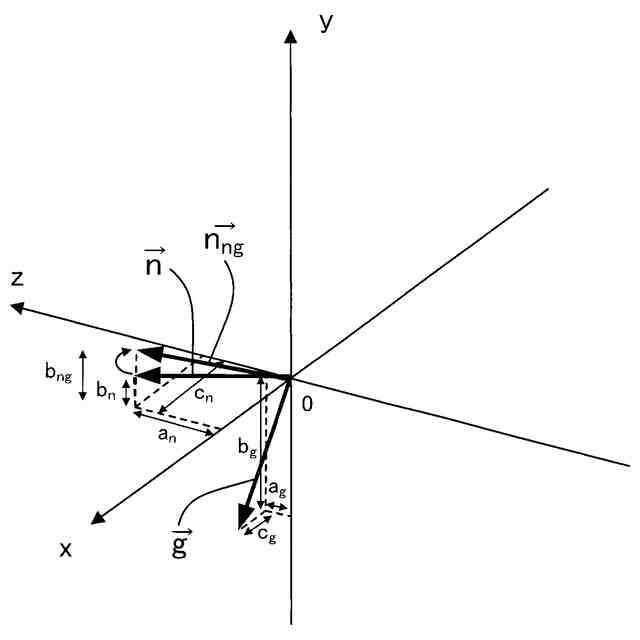
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの1つの成分のみ変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に直立しており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
投射面PPが鉛直方向に対して傾いており、第1法線ベクトルnの複数の成分を変換する場合の第2法線ベクトルnngの生成方法についての説明図。
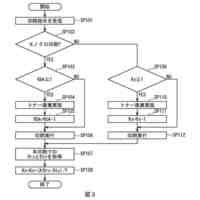
プロジェクター1の動作を示すフローチャート。
【発明を実施するための形態】
【0010】
以下、本発明を実施するための形態について図面を参照して説明する。ただし、各図において、各部の寸法及び縮尺は、実際のものと適宜に異ならせてある。また、以下に述べる実施形態は、本発明の好適な具体例であるから、技術的に好ましい種々の限定が付されているが、本発明の範囲は、以下の説明において特に本発明を限定する旨の記載がない限り、これらの形態に限られるものではない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
表示装置
1か月前
個人
雨用レンズカバー
1か月前
株式会社シグマ
絞りユニット
2か月前
日本精機株式会社
プロジェクタ
6日前
キヤノン株式会社
撮像装置
13日前
キヤノン株式会社
撮像装置
1か月前
日本精機株式会社
車両用投射装置
2か月前
キヤノン株式会社
撮像装置
2か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
1か月前
キヤノン株式会社
撮像装置
2か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
今日
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
2か月前
株式会社リコー
画像形成装置
27日前
キヤノン株式会社
画像形成装置
1か月前
キヤノン株式会社
トナー
2か月前
キヤノン株式会社
トナー
2か月前
キヤノン株式会社
トナー
1か月前
キヤノン株式会社
画像形成装置
1か月前
株式会社オプトル
プロジェクタ
2か月前
キヤノン株式会社
画像形成装置
21日前
レーザーテック株式会社
光源装置
29日前
キヤノン株式会社
レンズキャップ
1か月前
沖電気工業株式会社
画像形成装置
1か月前
沖電気工業株式会社
画像形成装置
1か月前
アイホン株式会社
カメラシステム
2か月前
スタンレー電気株式会社
照明装置
2か月前
キヤノン株式会社
現像装置
2か月前
沖電気工業株式会社
画像形成装置
8日前
レーザーテック株式会社
光源装置
8日前
古野電気株式会社
装置
1か月前
シャープ株式会社
捺染トナー
6日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ