TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025179719
公報種別
公開特許公報(A)
公開日
2025-12-10
出願番号
2024086647
出願日
2024-05-28
発明の名称
巡回点検システム及び巡回点検方法
出願人
JFEスチール株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/617 20240101AFI20251203BHJP(制御;調整)
要約
【課題】ロボットが巡回中に故障するリスクを低減できる巡回点検システム及び巡回点検方法を提供する。
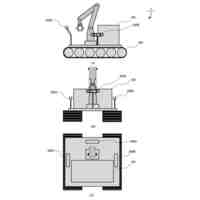
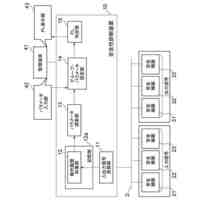
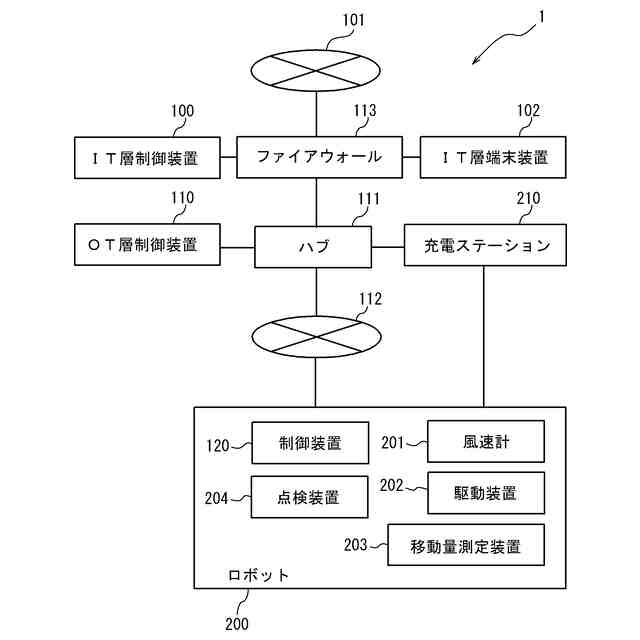
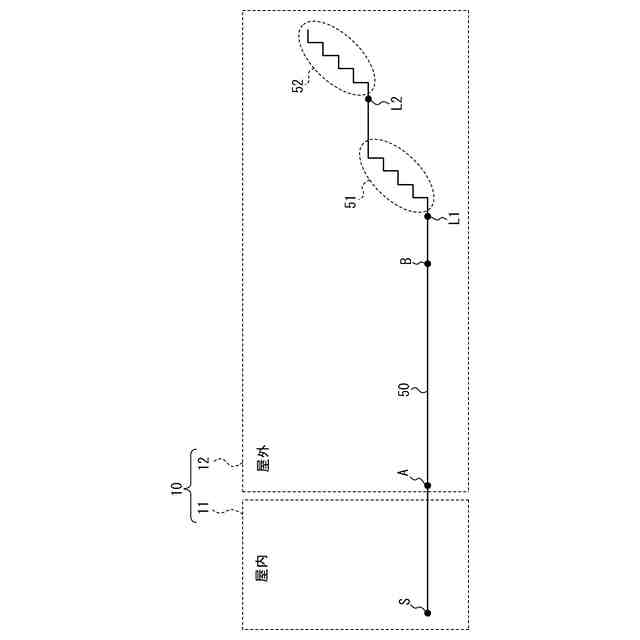
【解決手段】難移動箇所を含む巡回ルート50を点検する巡回点検システム1は、巡回ルート50に沿って移動して点検を実行するロボット200と、ロボット200を制御する制御装置120とを備える。制御装置120は、ロボット200が難移動箇所を点検するときに難移動箇所の状況である難移動箇所状況が危険であると判定した場合にロボット200に巡回ルート50の点検を回避させる。
【選択図】図1
特許請求の範囲
【請求項1】
難移動箇所を含む巡回ルートを点検する巡回点検システムであって、
前記巡回ルートに沿って移動して点検を実行するロボットと、
前記ロボットを制御する制御装置と
を備え、
前記制御装置は、前記ロボットが難移動箇所を点検するときに前記難移動箇所の状況である難移動箇所状況が危険であると判定した場合に前記ロボットに前記巡回ルートの点検を回避させる、
巡回点検システム。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記難移動箇所状況に関する事前情報、又は、前記難移動箇所状況に関する測定データの少なくとも一方に基づいて、前記難移動箇所状況が危険であるかを判定する、請求項1に記載の巡回点検システム。
【請求項3】
前記制御装置は、
前記ロボットが前記巡回ルートの点検を開始する前に前記事前情報に基づいて前記難移動箇所状況の事前判定を実行し、
前記事前判定で前記難移動箇所状況が危険ではないと判定した場合に、前記ロボットに前記巡回ルートの点検を開始させ、
前記ロボットが前記巡回ルートに沿って点検している間に、前記測定データに基づいて前記難移動箇所状況の再判定を実行する、請求項2に記載の巡回点検システム。
【請求項4】
前記難移動箇所は、前記巡回ルートにおける屋外部分であり、前記事前情報は、前記屋外部分の天候に関する予報又は過去の天候の観測データの少なくとも一方を含む、請求項2に記載の巡回点検システム。
【請求項5】
前記測定データは、前記屋外部分の易滑性を表す指標又は前記屋外部分の風速の少なくとも一方を含む、請求項4に記載の巡回点検システム。
【請求項6】
前記ロボットは、前記屋外部分の風速を測定する風速計を備える、請求項5に記載の巡回点検システム。
【請求項7】
前記風速計は、超音波式風速計である、請求項6に記載の巡回点検システム。
【請求項8】
前記制御装置は、前記難移動箇所として、前記巡回ルートのうち屋外に位置する段差部又は斜面部の少なくとも一方の状況が危険であるかを判定する、請求項1から7までのいずれか一項に記載の巡回点検システム。
【請求項9】
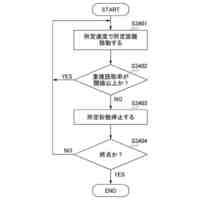
難移動箇所を含む巡回ルートを点検する巡回点検方法であって、
制御装置が、前記巡回ルートに沿ってロボットを移動させる巡回ステップと、
前記ロボットが、前記巡回ルートに沿って点検する点検ステップと
を含み、
前記巡回ステップにおいて、前記制御装置が、前記ロボットが前記難移動箇所を点検するときに前記難移動箇所の状況である難移動箇所状況が危険であると判定した場合に前記ロボットに前記巡回ルートの点検を回避させる、
巡回点検方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、巡回ルートに沿って移動するロボットによって巡回点検を行う巡回点検システム及び巡回点検方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
プラント等の保守点検作業において無人化が望まれている。そこで、自律的に移動可能なロボットによって作業者の代わりにプラント設備の点検作業等のタスクを実行させることが試みられている。例えば特許文献1には、巡回ルートごとに開始時刻をスケジューリングすることで、登録された時刻に複数のロボットが自動的に巡回点検作業を開始するロボット制御装置が開示されている。また、自律的に移動可能なロボットの例として、特許文献2には、脚部などの移動手段を有し、階段の昇降動作が可能なロボットが開示されている。特許文献3には、脚車輪型の移動ロボットが開示されている。特許文献4には、四脚ロボットが開示されている。その他にも、例えば蜘蛛脚のような多脚ロボット等も知られている。
【先行技術文献】
【特許文献】
【0003】
特開2005-324278号公報
国際公開第2005/087452号
特開2003-205480号公報
特表2020-501918号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献2~4に開示されているような脚式ロボットを用いて、特許文献1に開示されているような巡回点検作業を実施することで、1台のロボットによって複数のフロアの巡回点検作業を実施することができる。しかし、これらは、登録された屋内の巡回ルートに沿って登録された時刻に自動的に巡回点検作業を実施する技術である。屋外等の難移動箇所を含むルートの巡回点検作業にこれらの技術を適用する場合、降雨又は強風等の悪天候時の巡回点検作業において、ロボットの転倒又は滑落によってロボットが故障するリスクがある。
【0005】
本開示は、上記課題を解決するため、ロボットが巡回中に故障するリスクを低減できる巡回点検システム及び巡回点検方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一実施形態に係る(1)巡回点検システムは、難移動箇所を含む巡回ルートを点検する。前記巡回点検システムは、前記巡回ルートに沿って移動して点検を実行するロボットと、前記ロボットを制御する制御装置とを備える。前記制御装置は、前記ロボットが前記難移動箇所を点検するときに前記難移動箇所の状況である難移動箇所状況が危険であると判定した場合に前記ロボットに前記巡回ルートの点検を回避させる。
【0007】
(2)上記(1)に記載の巡回点検システムにおいて、前記制御装置は、前記難移動箇所に関する事前情報、又は、前記難移動箇所状況に関する測定データの少なくとも一方に基づいて、前記難移動箇所状況が危険であるかを判定してよい。
【0008】
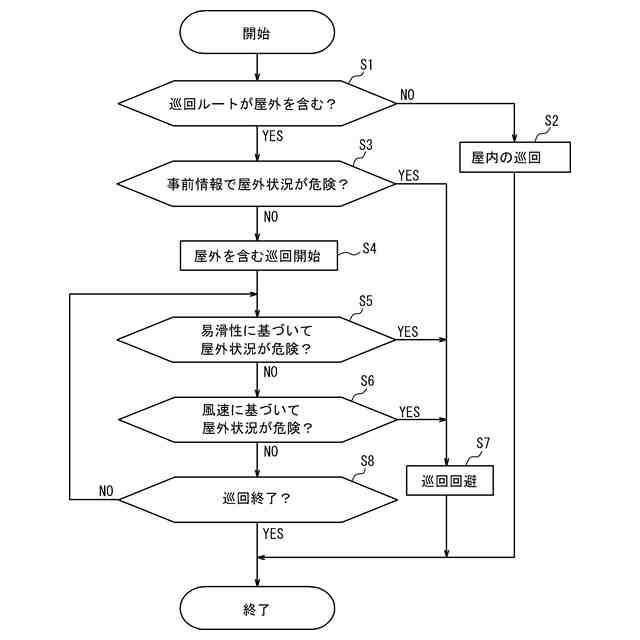
(3)上記(2)に記載の巡回点検システムにおいて、前記制御装置は、前記ロボットが前記巡回ルートの点検を開始する前に前記事前情報に基づいて前記難移動箇所状況の事前判定を実行し、前記事前判定で前記難移動箇所状況が危険ではないと判定した場合に、前記ロボットに前記巡回ルートの点検を開始させ、前記ロボットが前記巡回ルートに沿って点検している間に、前記測定データに基づいて前記難移動箇所状況の再判定を実行してよい。
【0009】
(4)上記(2)又は(3)に記載の巡回点検システムにおいて、前記難移動箇所は、前記巡回ルートにおける屋外部分であってよい。前記事前情報は、前記屋外部分の天候に関する予報又は過去の天候の観測データの少なくとも一方を含んでよい。
【0010】
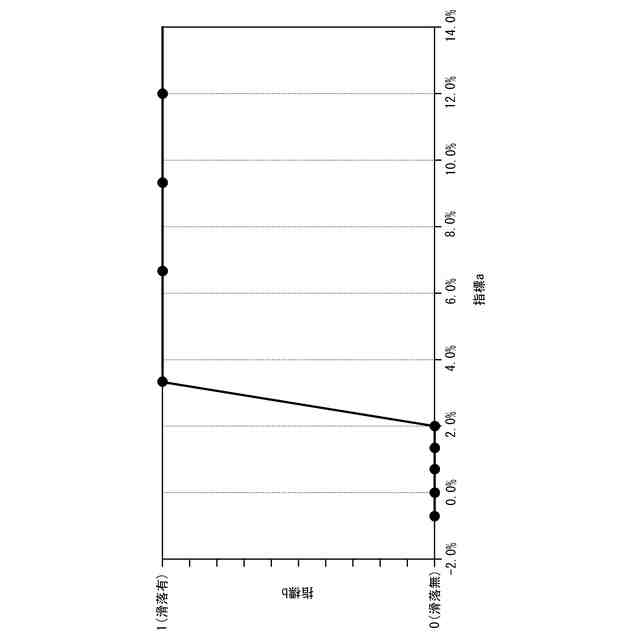
(5)上記(4)に記載の巡回点検システムにおいて、前記測定データは、前記屋外部分の易滑性を表す指標又は前記屋外部分の風速の少なくとも一方を含んでよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
4か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社クボタ
作業車
13日前
新電元工業株式会社
作業用ロボット
2日前
個人
作業車両自動化システム
4か月前
新電元工業株式会社
作業用ロボット
2か月前
株式会社クボタ
作業車
1か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
14日前
株式会社ダイフク
搬送設備
4か月前
トヨタ自動車株式会社
移動制御システム
4か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
29日前
キヤノン株式会社
配送システム
3か月前
カヤバ株式会社
減圧弁
2か月前
株式会社ダイフク
物品搬送設備
21日前
トヨタ自動車株式会社
制御装置
2か月前
株式会社日立製作所
工程設計装置
1日前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
株式会社ダイフク
物品搬送設備
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
株式会社TMEIC
安全性診断装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
4か月前
株式会社CAOS
移動体の制御システム
3か月前
株式会社エヌデーデー
三次元飛行経路作成方法
1日前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
キヤノン電子株式会社
加工システム、及び、加工装置
4か月前
RFルーカス株式会社
自動棚卸ロボット
8日前
愛知製鋼株式会社
マーカシステム及び制御方法
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ