TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025175693
公報種別
公開特許公報(A)
公開日
2025-12-03
出願番号
2024081912
出願日
2024-05-20
発明の名称
自動棚卸ロボット
出願人
RFルーカス株式会社
代理人
個人
,
個人
主分類
G05D
1/648 20240101AFI20251126BHJP(制御;調整)
要約
【課題】店舗内の商品RFIDタグと位置RFIDタグを読み取って、店舗内を移動することにより、棚卸を自動で実行できる自動棚卸ロボットを提供すること。
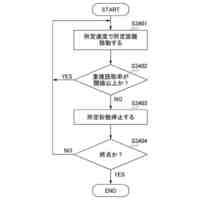
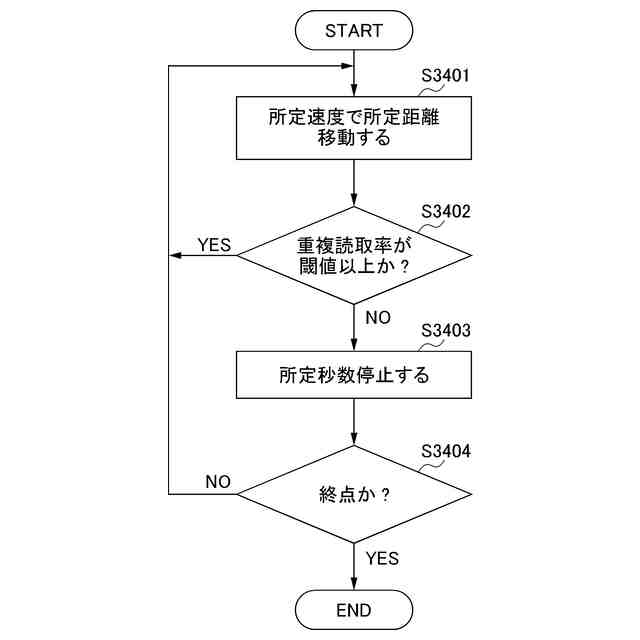
【解決手段】ステップS3401において、自動棚卸ロボットが所定速度で所定距離移動する。ステップS3402において、自動棚卸ロボットは、商品RFIDタグを重複して読み取った率である重複読取率を算出する。重複読取率が閾値以上である場合は、ステップS3401に移動する。しかし、重複読取率が閾値より低い場合は、新規に読み取っている商品RFIDタグがまだ多いことを意味し、位置RFIDタグを確実に読み取るために、ステップS3403において所定秒数停止する動作を加える。
【選択図】図4
特許請求の範囲
【請求項1】
店舗内のフロアを自動走行して、商品RFIDタグ及び位置RFIDタグを読み取る自動棚卸ロボットであって、
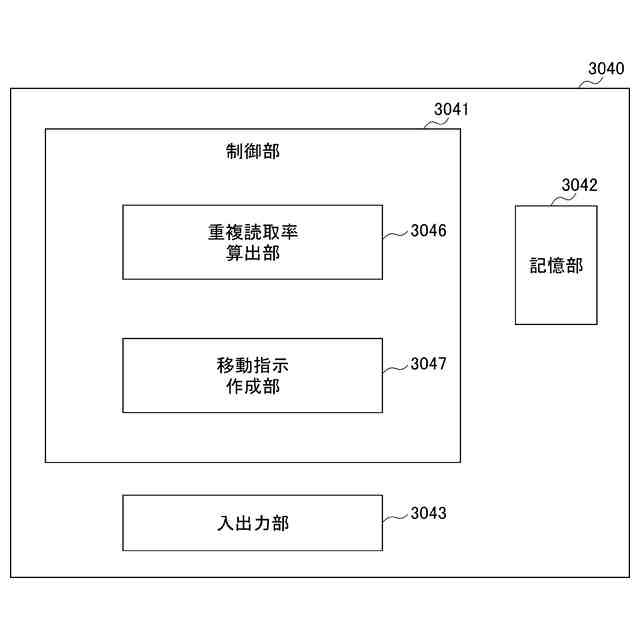
商品RFIDタグを重複して読み取った割合である重複読取率を算出する重複読取率算出部と、
前記重複読取率に基づいて、前記自動棚卸ロボットの移動を制御する移動指示を作成する移動指示作成部と、
前記移動指示に従って、前記自動棚卸ロボットの移動を制御する走行制御部と、
を備えた自動棚卸ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記移動指示作成部は、所定速度で所定距離移動した後、所定時間、静止するという動作を基本とし、重複読取率が閾値以上である場合には、所定時間、静止するという動作を省く移動指示を作成する、請求項1に記載の自動棚卸ロボット。
【請求項3】
指向性を有した上部アンテナ及び下部アンテナを備えた、請求項1に記載の自動棚卸ロボット。
【請求項4】
人間に追随して障害物マップ作成ロボットを走行させる人間追随走行制御部と、
走行履歴を記録する走行履歴記録部と、
前記走行履歴に基づいて前記障害物マップ作成ロボットの現在の位置座標を算出する現在位置座標算出部と、
障害物までの距離を検出するライダ部と、
前記障害物までの距離、及び前記障害物マップ作成ロボットの現在の位置座標に基づいて、障害物マップを作成する障害物マップ作成部と、
前記障害物マップとフロア図を重ね合わせる重ね合わせ部と、
を備えた障害物マップ作成ロボット。
【請求項5】
前記障害物マップと前記フロア図を重ね合わせた結果に基づいて、フロアの通路を各棚に対応した複数の区画に分割する区画決定部を更に備えた、請求項4に記載の障害物マップ作成ロボット。
【請求項6】
前記区画を規定する座標情報を作成して、前記座標情報と棚番号の対応表を作成する区画・棚番号変換表作成部を更に備えた、請求項5に記載の障害物マップ作成ロボット。
【請求項7】
走行可能でRFIDタグを読み取り可能な自動探索ロボットの制御方法であって、
探索対象のRFIDタグを重複して読み取った割合である重複読取率を算出し、
前記重複読取率に基づいて、前記自動探索ロボットの移動を制御する制御方法。
【請求項8】
走行予定領域の所定位置に貼付された位置RFIDタグを読み取ることで前記自動探索ロボットの自己位置を判断する請求項7に記載の制御方法。
【請求項9】
前記自動探索ロボットの走行経路を順次記録し、
前記走行経路から前記自動探索ロボットの自己位置を判断する請求項7に記載の制御方法。
【請求項10】
前記自己位置と、前記探索対象のRFIDタグの読取結果とを紐づけて記録する請求項8又は請求項9に記載の制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動的に棚卸をするロボットに関する。
続きを表示(約 3,800 文字)
【背景技術】
【0002】
従来より、店舗においては、定期的に、店舗にどれだけの商品があるかを調査する「棚卸」が行われている。
出願人は、特許文献1において、商品にアイテムRFIDタグ(「商品RFIDタグ」ともいう。)を貼付し、棚やフロアなどの什器に場所を示す位置RFIDタグを貼付しておき、店員が店舗内を移動しつつ、ハンディリーダでRFIDタグを読み取る技術を開示している。ほぼ同時刻に読み取った商品RFIDタグと位置RFIDタグは同じ場所に存在していると推定できるから、商品が置かれている場所の情報を得ることができる。
特許文献1の技術は、棚卸に利用できる。しかし、特許文献1の技術は、商品が棚の高い位置に置かれていることもあるので、店員がハンディリーダの向きを上下に変えながらRFIDタグを読み取ることを前提にしている。そのため、店員の腕の疲労が大きい。
【先行技術文献】
【特許文献】
【0003】
特許第6803089号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
出願人は、店舗内を移動しながら、店舗内の商品RFIDタグと位置RFIDタグを自動的に読み取るロボットを開発した。しかし、実験してみると、ロボットの移動速度を十分に遅くすることで、商品RFIDタグの読み取り率を100%にすることは可能であったが、読みとり率が100%であったとしても、位置を間違えて決定した率が、満足できる値以下にならなかった。原因を調べたところ、ロボットが移動するのが早くて、位置RFIDタグの読み取りに失敗していたことが原因と推定された。そこで、ロボットが店舗内を移動する態様を、商品RFIDタグの読み取り状態に応じて制御することを対応策として考えた。
また、棚やフロアなどの什器に場所を示す位置RFIDタグを貼付するという作業は、大規模の店舗においては、大変な時間と労力を必要とする。したがって、位置RFIDタグを貼付する必要のない商品管理システムが実現できれば、その方が望ましい。
【0005】
本発明は、店舗内を移動する態様を自動的に制御する自動棚卸ロボットを提供することを目的とする。
また、本発明は、他の目的として、位置RFIDタグを棚やフロアなどの什器に貼付する必要のない商品管理システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明者らは、商品RFIDタグの読み取り状態に応じて、自動棚卸ロボットが店舗内を移動する態様を制御することにより、位置RFIDタグの読み取りに失敗することが少なくなることを見出し、本発明を完成するに至った。
また、本発明者らは、障害物マップ作成ロボットにより障害物マップを作成すれば、位置RFIDタグを貼っていないフロアにおいても、自動棚卸が可能であることを見出し、本発明を完成するに至った。
【0007】
(1)本発明に係る第1の自動棚卸ロボットは、店舗内のフロアを自動走行して、商品RFIDタグ及び位置RFIDタグを読み取る自動棚卸ロボットであって、商品RFIDタグを重複して読み取った割合である重複読取率を算出する重複読取率算出部と、前記重複読取率に基づいて、前記自動棚卸ロボットの移動を制御する移動指示を作成する移動指示作成部と、前記移動指示に従って、前記自動棚卸ロボットの移動を制御する走行制御部と、を備える。
(2)前記移動指示作成部は、所定速度で所定距離移動した後、所定時間、静止するという動作を基本とし、重複読取率が閾値以上である場合には、所定時間、静止するという動作を省く移動指示を作成してもよい。
(3)本発明に係る第1の自動棚卸ロボットは、指向性を有した上部アンテナ及び下部アンテナを備えてもよい。
(4)本発明に係る障害物マップ作成ロボットは、人間に追随して障害物マップ作成ロボットを走行させる人間追随走行制御部と、走行履歴を記録する走行履歴記録部と、前記走行履歴に基づいて前記障害物マップ作成ロボットの現在の位置座標を算出する現在位置座標算出部と、障害物までの距離を検出するライダ部と、前記障害物までの距離、及び前記障害物マップ作成ロボットの現在の位置座標に基づいて、障害物マップを作成する障害物マップ作成部と、前記障害物マップとフロア図を重ね合わせる重ね合わせ部と、
を備える。
(5)本発明に係る障害物マップ作成ロボットは、前記障害物マップと前記フロア図を重ね合わせた結果に基づいて、フロアの通路を各棚に対応した複数の区画に分割する区画決定部を更に備えてもよい。
(6)本発明に係る障害物マップ作成ロボットは、前記区画を規定する座標情報を作成して、前記座標情報と棚番号の対応表を作成する区画・棚番号変換表作成部を更に備えてもよい。
(7)本発明に係る制御方法は、走行可能でRFIDタグを読み取り可能な自動探索ロボットの制御方法であって、探索対象のRFIDタグを重複して読み取った割合である重複読取率を算出し、前記重複読取率に基づいて、前記自動探索ロボットの移動を制御する。
(8)本発明に係る制御方法は、走行予定領域の所定位置に貼付された位置RFIDタグを読み取ることで前記自動探索ロボットの自己位置を判断してもよい。
(9)本発明に係る制御方法は、前記自動探索ロボットの走行経路を順次記録し、前記走行経路から前記自動探索ロボットの自己位置を判断してもよい。
(10)本発明に係る制御方法は、前記自己位置と、前記探索対象のRFIDタグの読取結果とを紐づけて記録してもよい。
(11)本発明に係る第2の自動棚卸ロボットは、所定領域を走行して、前記所定領域内に配置された商品に貼付された商品RFIDタグを読み取る自動棚卸ロボットであって、前記自動棚卸ロボットの前記所定領域における現在位置を判断可能な現在位置情報を算出する現在位置算出部と、前記現在位置情報と紐づけて前記商品RFIDタグから読み取った情報を記憶する記憶部と、前記商品RFIDタグを重複して読み取った割合である重複読取率を算出する重複読取率算出部と、前記重複読取率に基づいて、前記自動棚卸ロボットの移動を制御する移動指示を作成する移動制御部と、を備える。
(12)本発明に係る第3の自動棚卸ロボットは、店舗内のフロアを自動走行して、商品RFIDタグを読み取る自動棚卸ロボットであって、スタート地点における前記自動棚卸ロボットの向きに基づいて、スタート地点の座標に、前記自動棚卸ロボットの移動量を加算して、前記自動棚卸ロボットの現在位置の座標を求める処理を制御する制御部を備える。
【発明の効果】
【0008】
本発明によれば、自動棚卸ロボットにより自動で棚卸を行うことができるので、店員の負担を軽減できる。
また、本発明によれば、位置RFIDタグを貼っていないフロアにおいても、自動棚卸ロボットにより棚卸を行うことができるので、位置RFIDタグを貼る作業を省くことが可能になり、更に店員の負担を軽減できる。
【図面の簡単な説明】
【0009】
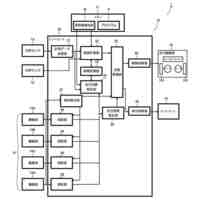
本発明の実施形態1の自動棚卸ロボットを示す図である。
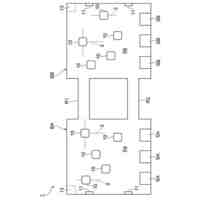
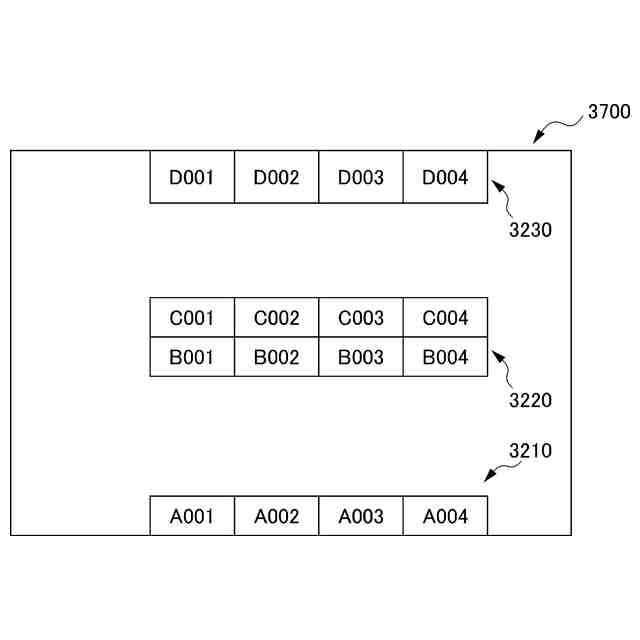
本発明の実施形態1の店舗のフロアのレイアウトの一例を示す図である。
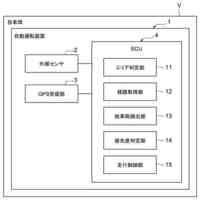
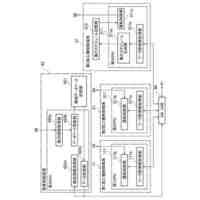
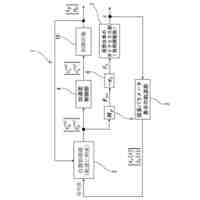
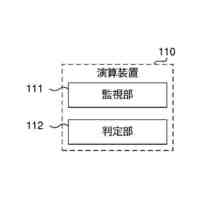
本発明の実施形態1のタブレットの機能ブロックを示す図である。
本発明の実施形態1のタブレットにおける処理の流れを示す図である。
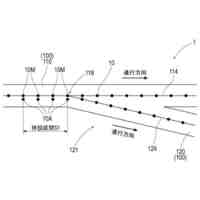
本発明の実施形態1の重複読取率の算出の一例を示す図である。
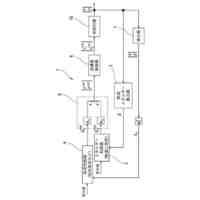
本発明の実施形態2の障害物マップ作成ロボットを示す図である。
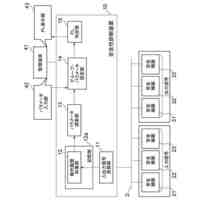
本発明の実施形態2のタブレットの機能ブロックを示す図である。
本発明の実施形態2の障害物マップ作成部が作成した障害物マップの例である。
本発明の実施形態2の重ね合わせ部が、フロア図に、回転、拡大縮小した障害物マップを重ね合わせた結果を示す図である。 を示す図である。
本発明の実施形態2の区画決定部が、通路を、各棚に対応した複数の区画に分割した結果を示す図である。
本発明の実施形態2の区画・棚番号変換表作成部が作成した区画・棚番号変換表の例を示す図である。
本発明の実施形態3を説明するためのフロア図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面とともに説明する。
[実施形態1]
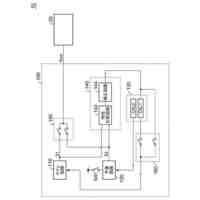
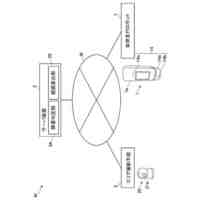
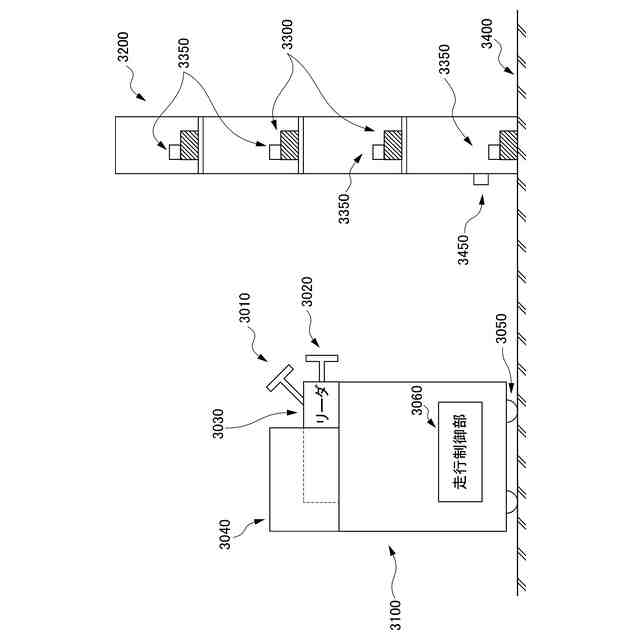
図1は、本発明の実施形態1の自動棚卸ロボット3100を示す図である。
自動棚卸ロボット3100は、リーダ3030、上部アンテナ3010、下部アンテナ3020、タブレット3040、走行制御部3060、及び車輪3050を備えている。リーダ3030は、上部アンテナ3010及び下部アンテナ3020を通じて商品RFIDタグと位置RFIDタグと無線で通信し、それらのRFIDタグを読み取る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
ローム株式会社
基準電圧源
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
愛知製鋼株式会社
車両用システム
3か月前
新電元工業株式会社
作業用ロボット
1か月前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業車
1か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
7日前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
22日前
株式会社ダイフク
搬送設備
3か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
キヤノン株式会社
配送システム
3か月前
カヤバ株式会社
減圧弁
2か月前
トヨタ自動車株式会社
制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
14日前
日野自動車株式会社
自動運転装置
1か月前
株式会社TMEIC
安全性診断装置
2か月前
愛知製鋼株式会社
マーカシステム及び制御方法
3か月前
RFルーカス株式会社
自動棚卸ロボット
1日前
村田機械株式会社
搬送車システム
1か月前
株式会社CAOS
移動体の制御システム
2か月前
株式会社アマダ
工作機械制御装置
1か月前
株式会社計数技研
移動体、及びプログラム
14日前
シンフォニアテクノロジー株式会社
自動走行車両
2か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社カーメイト
アクセルペダルカバー
2か月前
株式会社明電舎
負荷制御装置
1か月前
オムロン株式会社
システム及び方法
1か月前
オムロン株式会社
システム及び方法
1か月前
トヨタ自動車株式会社
情報処理装置
2か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ