TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025179718
公報種別
公開特許公報(A)
公開日
2025-12-10
出願番号
2024086645
出願日
2024-05-28
発明の名称
三次元飛行経路作成方法
出願人
株式会社エヌデーデー
代理人
個人
主分類
G05D
1/46 20240101AFI20251203BHJP(制御;調整)
要約
【課題】
手動制御における問題点解決のため、飛行体、特にUAV(Unmanned Aerial Vehicle 、無人航空機)、いわゆるドローン等を自動制御により飛行させるための三次元飛行経路作成方法を提供すること。
【解決手段】
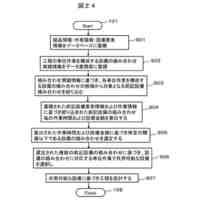
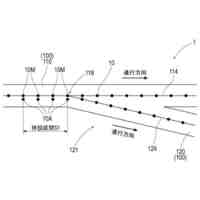
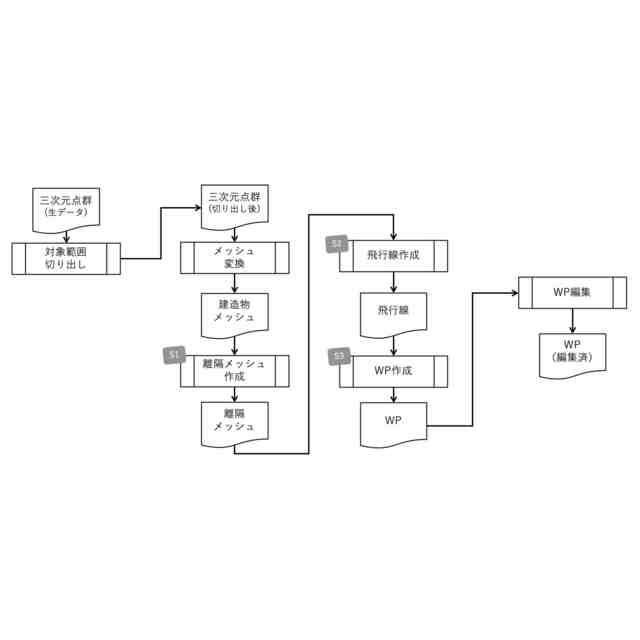
遠隔操作により自動制御されて飛行しつつ、撮影対象を自動撮影する飛行体の飛行経路を作成する方法であって、撮影対象の構造物メッシュに対し、所定の離隔距離を有する離隔メッシュを作成するステップ、作成された離隔メッシュ上に飛行体が飛行する経路である飛行線を作成するステップ、作成された飛行線上に、撮影対象を撮影する地点に相当するWPを作成するステップを有することを特徴とする飛行経路作成方法。
【選択図】図2
特許請求の範囲
【請求項1】
遠隔操作により自動制御されて飛行しつつ、撮影対象を自動撮影する飛行体の飛行経路を作成する方法であって、撮影対象の構造物メッシュに対し、所定の離隔距離を有する離隔メッシュを作成するステップ、作成された離隔メッシュ上に飛行体が飛行する経路である飛行線を作成するステップ、作成された飛行線上に、撮影対象を撮影する地点に相当するWPを作成するステップを有することを特徴とする飛行経路作成方法。
続きを表示(約 400 文字)
【請求項2】
離隔メッシュを作成するステップにおいて、各メッシュ点に対して法線が推定され、法線の推定が行われた後、推定された法線方向に離隔メッシュが作成されることを特徴とする請求項1に記載の飛行経路作成方法。
【請求項3】
離隔メッシュを作成するステップにおいて、スムージングが行われることを特徴とする請求項2に記載の飛行経路作成方法。
【請求項4】
飛行線を作成するステップにおいて、複数の飛行線が決定され、収束計算によりこれら複数の飛行線の間の平均間隔が一定となるよう、飛行線が決定されることを特徴とする請求項1に記載の飛行経路作成方法。
【請求項5】
WPを作成するステップにおいて、次のWPの決定の際に、飛行線の所定の線分間の位置が求められることにより、所定の距離だけ離れた次のWPが決定されることを特徴とする請求項1に記載の飛行経路作成方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、三次元飛行経路作成方法、及びプログラムに関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
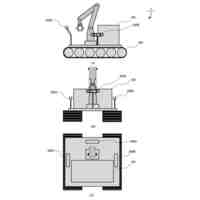
ダムや橋梁など、巨大な立体物を飛行体から撮影し、表面の構造・不良箇所などの点検を行いたいというニーズがある。このような撮影のためには、いわゆるドローンが用いられる。表面の構造・不良箇所などを点検するには、高精細かつ一定品質でもれなく撮影することが必要であるので、複数(多数)の写真を撮影する必要がある。そのため、ドローンを所定経路にて飛行させ、所定の間隔で撮影を行う必要が生じる。
【0003】
しかしながらそのような撮影にあたっては、複雑な表面構造を有する立体物に対して、所定の間隔を有した状態で、ドローンを所定経路に飛行させねばならず、更にそのような飛行経路中において所定間隔で撮影を行うというのは、手動制御では操縦困難性が極めて高い。
【先行技術文献】
【特許文献】
【0004】
特開2020-43543号公報
【非特許文献】
【0005】
Taubin, “Curve and surface smoothing without shrinkage”, 1995
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで本発明は、上述した手動制御における問題点を解決のため、飛行体、特にUAV(Unmanned Aerial Vehicle 、無人航空機)、いわゆるドローン等を自動制御により飛行させるための、三次元飛行経路作成方法、及びプログラムを提供することを課題とする。
【課題を解決するための手段】
【0007】
この課題は、本発明にかかる飛行経路作成方法であって、遠隔操作により自動制御されて飛行しつつ、撮影対象を自動撮影する飛行体の飛行経路を作成する方法であり、撮影対象の構造物メッシュに対し、所定の離隔距離を有する離隔メッシュを作成するステップ、作成された離隔メッシュ上に飛行体が飛行する経路である飛行線を作成するステップ、作成された飛行線上に、撮影対象を撮影する地点に相当するWP(ウェイポイント)を作成するステップを有する飛行経路作成方法により解決される。
【0008】
さらなる発展型では、離隔メッシュを作成するステップにおいて、各メッシュ点に対して法線が推定され、法線の推定が行われた後、推定された法線方向に離隔メッシュが作成されることも可能である。
【0009】
離隔メッシュを作成するステップにおいて、スムージングが行われると有利である。
【0010】
飛行線を作成するステップにおいて、複数の飛行線が決定され、収束計算によりこれら複数の飛行線の間の平均間隔が一定となるよう、飛行線が決定されることも考えられる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社エヌデーデー
三次元飛行経路作成方法
今日
個人
生産早送り装置
4か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
12日前
新電元工業株式会社
作業用ロボット
1日前
新電元工業株式会社
作業用ロボット
2か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
13日前
株式会社アサヒエンタープライズ
調整弁
28日前
株式会社ダイフク
搬送設備
3か月前
トヨタ自動車株式会社
移動制御システム
4か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
4か月前
株式会社ダイフク
物品搬送設備
20日前
株式会社日立製作所
工程設計装置
今日
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
1か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
トヨタ自動車株式会社
制御装置
2か月前
カヤバ株式会社
減圧弁
2か月前
キヤノン株式会社
配送システム
3か月前
株式会社エヌデーデー
三次元飛行経路作成方法
今日
株式会社TMEIC
安全性診断装置
2か月前
キヤノン電子株式会社
加工システム、及び、加工装置
4か月前
キヤノン電子株式会社
加工システム、及び、加工装置
4か月前
ルネサスエレクトロニクス株式会社
半導体装置
3か月前
愛知製鋼株式会社
マーカシステム及び制御方法
3か月前
株式会社CAOS
移動体の制御システム
3か月前
日野自動車株式会社
自動運転装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ